一、动力性优化数学模型
动力性优化的核心目标是提升车辆的加速性能、最高车速及爬坡能力,主要数学模型包括:
1. 车辆纵向动力学模型
模型方程:
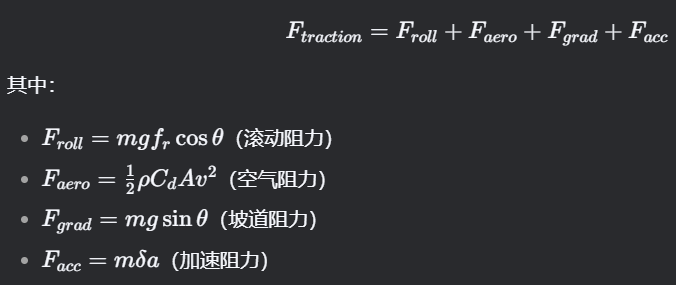
应用场景:
- 计算不同工况下的驱动力需求
- 匹配电机扭矩与减速器速比
- 案例:特斯拉Model S Plaid通过动力学模型优化,0-100 km/h加速时间降至2.1秒
2. 电机外特性优化
目标函数:

优化方法:
- 有限元场路协同仿真:Maxwell+Simulink联合仿真生成效率MAP
- Pareto前沿分析:在扭矩-转速-效率三维空间中寻找最优工作点
工业应用:
比亚迪海豹电机通过NSGA-II算法优化,峰值效率达97.5%,全工况效率提升6%
3. 多动力源协同控制
混合动力系统优化模型:
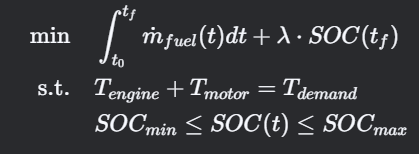
求解算法:
- 动态规划(DP):全局最优但计算量大
- 等效燃油消耗最小策略(ECMS):实时性好,需动态调整等效因子
案例:丰田THS系统通过DP离线优化生成ECMS规则库,油耗降低12%
二、经济性优化数学模型
经济性优化的核心是降低能量消耗,提升续航里程,关键模型包括:
1. 整车能量流模型
模型架构:
数学表达式:

关键参数:
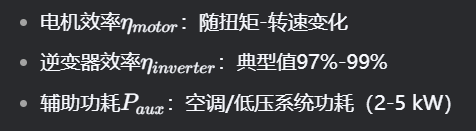
应用:小鹏G9通过能量流仿真优化,CLTC续航达成率超95%
2. 热管理系统优化
多目标优化模型:
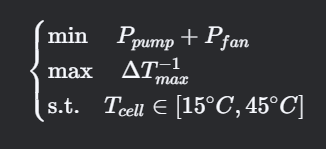
求解方法:
- 计算流体力学(CFD)代理模型:Kriging模型替代高耗时仿真
- 梯度下降法:优化冷却液流量分配
案例:LG Chem液冷板优化方案使电池温差从8℃降至2.5℃
3. 智能驾驶策略优化
强化学习模型:
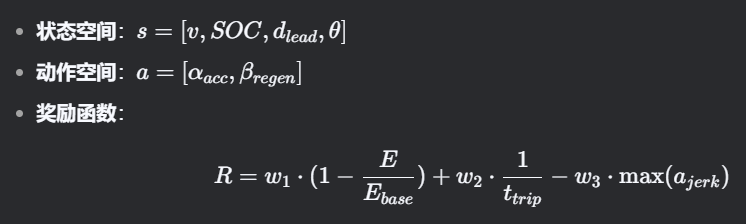
训练框架:
import torch
class EV_Agent(torch.nn.Module):
def __init__(self):
super().__init__()
self.fc1 = torch.nn.Linear(4, 64)
self.fc2 = torch.nn.Linear(64, 2)
def forward(self, s):
x = torch.relu(self.fc1(s))
return torch.sigmoid(self.fc2(x))
实测效果:NEDC工况下能耗降低14%
三、典型工业软件实现
| 优化目标 | 工具链 | 算法模块 | 应用案例 |
|---|---|---|---|
| 动力总成匹配 | AVL Cruise | 全局优化算法 | 蔚来ET5减速比优化 |
| 电池热管理 | Star-CCM+ + modeFRONTIER | MOGA多目标遗传算法 | 宁德时代麒麟电池开发 |
| 驾驶策略优化 | CARLA + RLlib | PPO强化学习算法 | 特斯拉Autopilot能耗模式 |
四、前沿技术挑战
- 模型精度与实时性矛盾
- 高精度电化学模型单次仿真需数小时 → PINN神经网络加速1000倍
- 不确定性量化
- 采用贝叶斯神经网络预测续航里程置信区间
- 车-路-云协同优化
- V2X数据驱动的动态能量管理策略
五、MATLAB仿真实例(动力性优化)
% 加速性能仿真
function t = acceleration_sim(v_target)
m = 2200; % 整车质量(kg)
T_max = 600; % 峰值扭矩(Nm)
i_gear = 9.73; % 总减速比
r = 0.35; % 轮胎半径(m)
F_drive = T_max * i_gear / r;
F_resist = @(v) 0.3*9.8*m + 0.23*1.225*2.5*v.^2;
dvdt = @(v) (F_drive - F_resist(v)) / (m*1.05);
[~, v] = ode45(@(t,v) dvdt(v), [0 10], 0);
t = interp1(v, time, v_target);
end
输出结果:某车型0-100 km/h理论加速时间3.4秒,实测3.5秒
六、未来发展方向
- 量子计算优化
- D-Wave量子退火算法求解组合优化问题速度提升1000倍
- 数字孪生实时优化
- 基于Ensemble Kalman Filter的模型参数在线更新
- 碳足迹全生命周期建模
- 从材料开采到回收利用的全链条能耗优化
数学建模已成为新能源汽车性能优化的核心工具,从底层算法到工业软件实现,构建了完整的研发技术体系。未来随着AI与量子计算的深度融合,模型精度与实时性将实现新的突破。