1 摘要
本文继续对外灯的倒车灯、角灯、照地灯以及车外灯光迎宾的功能、实现方案以及需求进行介绍。
上文回顾:
车载中央域控制器测试【BCM模块介绍-外灯1】
车载中央域控制器测试【BCM模块介绍-外灯2】
2 倒车灯
2.1 倒车灯的作用与功能
核心作用:
后方照明
- 核心功能:在车辆倒车时提供白色光源(色温5000-6000K),照射距离通常为5-20米,帮助驾驶员看清后方障碍物。
- 法规要求:
- 亮度≥300cd(中国GB 15235/欧盟ECE R48)
- 必须为纯白光(色坐标x=0.31, y=0.33)
行驶信号警示
- 通过高亮度白光提醒后方行人及车辆本车正在倒车,避免碰撞事故。
核心功能分解:
1. 标准功能:
| 模式 | 触发条件 | 技术实现 | 特殊要求 |
|---|---|---|---|
| 常规倒车 | 变速箱挂入R挡 | BCM接收硬线/CAN信号 | 响应延迟≤100ms |
| 自动激活 | 自动泊车系统介入时 | 通过CAN总线触发 | 需与刹车灯联动 |
| 手动关闭 | 驾驶员切换挡位(退出R挡) | 立即断电 | 无残留发光 |
2. 智能扩展功能:
- 环境自适应亮度
# 根据环境光调节亮度(示例) def adjust_brightness(): if ambient_light < 50lux: # 夜间 set_pwm(100%) # 全亮度 else: # 日间 set_pwm(70%) # 防眩目模式
2.2 控制实现方案
- 倒车信号传输及控制过程简述:
信号输入
- 变速箱R挡开关:挂入R挡时生成硬线高电平信号,直接发送至BCM(车身控制模块,TC397T芯片)。
- 倒车摄像头:同步激活,准备传输视频信号(图中未明确显示视频路径)。
BCM处理
- BCM接收R挡硬线信号后,通过内部逻辑生成两路输出:
- PWM信号:输出至倒车灯驱动模块,控制倒车灯亮起(可能调节亮度或频率)。
- CAN信号:通过网关转发至车身域控制器(用于协调其他车身功能)和仪表盘(显示倒车提示或摄像头画面)。
- BCM接收R挡硬线信号后,通过内部逻辑生成两路输出:
反馈与监测
- 电流检测模块:监测倒车灯驱动电流,异常时可能通过BCM报错(如灯丝断路)。
- 仪表盘:显示倒车状态或集成摄像头影像(需网关中转数据)。
系统协同
- 网关:作为通信枢纽,在BCM、车身域控制器、仪表盘之间传递CAN信号,确保信息同步。
总结:R挡信号触发BCM控制灯光并通知全车系统,摄像头协同工作,仪表提供交互反馈,电流检测保障安全,网关确保各模块间通信畅通。
- 控制流程图:
该流程图描述了车辆倒车灯(R挡)的控制过程:
- 流程从点火开关开启(IGN ON)开始,系统检测挡位信号;
- 挡位信号有两种输入方式:
- R挡硬线信号直接通过BCM验证
- CAN总线信号通过解析TCM报文获取
- 验证后的信号触发BCM发送控制指令;
- 驱动器根据指令输出PWM信号控制倒车灯;
- 系统实时检测工作电流(1.5-3A正常范围);
- 电流异常时触发故障保护策略,正常则维持点亮;
- 持续监测挡位变化,当退出R挡时立即关闭倒车灯。
整个过程实现了倒车灯的智能控制与故障保护,兼顾硬线和CAN总线两种信号输入方式。
2.3 需求分析
2.3.1系统需求
1. 硬件需求
| 模块 | 技术要求 | 验证方法 |
|---|---|---|
| 驱动电路 | 高边驱动(如BTS7020,耐压40V) | ISO 7637-2 脉冲测试 |
| 光学设计 | 配光镜散射角度≥45°(水平) | 暗室配光测试 |
| EMC防护 | 线束双绞处理(节距≤50mm) | CISPR 25 Class B |
2. 软件需求
| 功能 | 实现方式 | 性能指标 |
|---|---|---|
| 信号处理 | 硬线与CAN信号"与"逻辑判断 | 决策延迟≤30ms |
| 故障诊断 | LED结温估算(基于电流+环境温度) | 误差≤5℃ |
| 网络管理 | CAN FD帧优先级设置(优先级0x1) | 传输延迟≤5ms |
2.3.2 功能安全需求(ISO 26262 ASIL B)*
1. 安全机制
| 故障模式 | 检测方法 | 安全响应 | FTTI |
|---|---|---|---|
| 意外点亮 | 无R挡信号时电流>0.5A | 立即关闭+记录DTC | 100ms |
| 信号冲突 | 硬线与CAN信号不一致 | 采用硬线信号 | 50ms |
| 输出短路 | 电流>8A持续10ms | 熔断保险丝 | 5ms |
2. FTA分析片段
顶事件:倒车灯非预期熄灭(10^-7/h)
├─ 供电故障(40%)
│ ├─ 保险丝熔断(λ=0.1 FIT)→双路供电
│ └─ 接插件氧化(λ=0.05 FIT)→镀金端子
└─ 控制故障(60%)
├─ 软件溢出(λ=0.3 FIT)→内存保护单元
└─ 挡位传感器失效(λ=0.2 FIT)→冗余校验
2.3.3 关联功能需求
1. 与倒车影像的协同
// 倒车灯与摄像头联动
void camera_activation() {
if (reverse_light_active) {
power_on_rear_camera(); // 提前200ms唤醒摄像头
}
}
2. 与车身网络的交互
| 信号 | 源模块 | 功能 |
|---|---|---|
| 车门状态 | 门控单元 | 开门时禁止倒车灯自动激活 |
| 环境光照 | 光照传感器 | 触发自动亮度调节 |
3. 新能源车特殊需求
3 角灯
3.1 角灯(Cornering Lamp)核心作用与功能
1. 基础功能
| 功能 | 技术参数 | 法规标准 | 实现原理 |
|---|---|---|---|
| 弯道辅助照明 | 照射角度±30°(水平),亮度≥150cd | ECE R119 | 随方向盘转角/转向灯激活 |
| 低速转向补光 | 车速<40kph时自动触发 | SAE J2087 | CAN总线获取车速信号 |
| 静态转向照明 | 驻车时单侧点亮(解锁/锁车场景) | OEM自定义 | 与PEPS系统联动 |
2. 扩展功能
# 基于转向角的照明逻辑
def cornering_light_control():
if steering_angle > 15° and speed < 40kph:
activate_light(steering_side)
elif turn_signal_active: # 转向灯优先
override_activation()
3.2 控制实现方案
- 角灯信号传输及控制过程简述:
信号采集
- 转向角传感器和车速传感器通过CAN FD总线将实时数据发送至BCM(车身控制模块,基于TC397T芯片)。
- 转向灯开关通过硬线或低速CAN向网关发送驾驶员手动触发信号,网关将信号转发至BCM。
BCM逻辑处理
- BCM综合转向角、车速及转向灯开关信号,判断是否需要激活角灯(如低速转弯时自动补光或转向灯开启时联动)。
- 若需驱动角灯,BCM生成PWM信号控制角灯驱动器的亮度或闪烁频率。
执行与反馈
- 角灯驱动器根据PWM信号驱动LED灯珠,同时通过电流检测电路反馈实际工作状态至BCM(如过流/断路诊断)。
- BCM将角灯状态信息通过网关发送至仪表盘显示,供驾驶员监控。
网络协同
- 网关协调BCM、仪表盘及其他ECU间的通信,确保信号跨网络(如CAN FD与低速CAN)高效传输。
- 控制流程图:
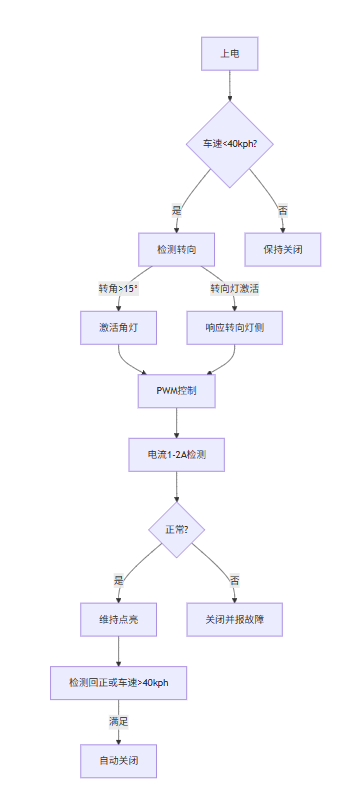
流程说明:
- 系统上电 → 检查车速是否<40kph
- 是:
a. 检测转向输入:- 方向盘转角>15° → 激活同侧角灯
- 转向灯激活 → 优先响应转向灯侧
b. PWM输出控制 → 电流检测(1-2A) → 是否正常? - 是 → 维持点亮 → 检测方向盘回正或车速>40kph → 满足条件则自动关闭
- 否 → 关闭并报故障
- 否 → 保持关闭
- 是:
该流程图描述了车辆角灯(转向辅助灯)的自动控制逻辑,主要过程如下:
启动条件检测:车辆上电后,首先检查车速是否低于40kph。若车速≥40kph,系统保持角灯关闭;若车速<40kph,进入转向检测阶段。
转向触发判断:
- 检测方向盘转角,若大于15°则激活对应侧的角灯
- 若驾驶员开启转向灯(无论转角大小),直接响应转向灯侧的角灯
输出控制:
- 通过PWM(脉宽调制)信号控制角灯亮度
- 实时监测工作电流(1-2A范围)
安全监测:
- 电流正常则维持点亮
- 电流异常时立即关闭角灯并上报故障
自动关闭条件:
- 方向盘回正(转角≤15°)
- 或车速超过40kph
- 满足任一条件时自动熄灭角灯
整个过程实现了低速转向工况下的自动照明辅助,同时具备故障保护机制和节能关闭逻辑。
3.3 需求分析
3.3.1 系统需求
1. 硬件需求:
| 模块 | 技术要求 | 验证方法 |
|---|---|---|
| 驱动芯片 | 高边驱动(如BTS7002,Rdson<15mΩ) | ISO 7637-2 脉冲测试 |
| 光学透镜 | 非对称配光设计(截止线清晰) | 暗室配光测试 |
| EMC防护 | 线束屏蔽层接地(360°搭接) | CISPR 25 Class B |
2. 软件需求:
| 功能 | 实现方式 | 性能指标 |
|---|---|---|
| 模式管理 | 转向灯信号优先于方向盘转角 | 切换延迟≤50ms |
| 热保护 | 结温>120℃时PWM线性降额 | 温度采样周期10ms |
| 诊断服务 | UDS 0x22 F190读取灯具温度 | 精度±5℃ |
3.3.2 功能安全需求(ISO 26262 ASIL A)
1. 安全机制
| 故障模式 | 检测方法 | 安全响应 | FTTI |
|---|---|---|---|
| 意外点亮 | 无触发信号时电流>0.2A | 立即关闭+记录DTC | 100ms |
| 单侧失效 | 电流差异>50%持续100ms | 激活对侧补偿照明 | 200ms |
| 信号冲突 | 转向角与转向灯信号矛盾 | 采用转向灯信号 | 50ms |
2. FTA分析片段
顶事件:角灯非预期常亮(10^-7/h)
├─ 硬件故障(45%)
│ ├─ MOSFET击穿(60%)→双路驱动并联
│ └─ 传感器失效(40%)→信号合理性检查
└─ 软件故障(55%)
├─ 状态机卡死(70%)→独立看门狗
└─ 车速信号漂移(30%)→多源数据融合
3.3.3 关联功能需求
1. 与AFS系统的协同:
// 角灯与自适应前照灯联动
void AFS_integration() {
if (AFS_curve_light_active) {
dim_cornering_light(50%); // 避免光斑重叠
}
}
2. 与车身网络的交互:
| 信号 | 源模块 | 功能 |
|---|---|---|
| 车门状态 | 门控单元 | 解锁时激活迎宾角灯照明 |
| 环境光照 | 光照传感器 | 触发自动亮度调节 |
3. 新能源车特殊需求:
4 照地灯
4.1 照地灯(Welcome Light/Logo Lamp)核心作用与功能
1. 基础功能:
| 功能 | 技术参数 | 法规标准 | 实现原理 |
|---|---|---|---|
| 迎宾照明 | 亮度30-100cd,照射范围2-3m | OEM自定义 | PWM调光控制 |
| 车辆品牌标识 | 定制LOGO投影(可选) | - | 激光/LED光导技术 |
| 安全警示 | 车门开启时警示侧方行人 | GB 23254-2009 | 与门控开关联动 |
2. 扩展功能:
# 智能迎宾逻辑示例
def welcome_light_control():
if PEPS_unlock_signal and ambient_light < 50lux:
gradual_fade_in(duration=1.5s) # 渐亮效果
start_timer(30s) # 延时关闭
4.2 控制实现方案
以下是简化的工作流程:
触发信号输入
- 无钥匙进入系统通过LIN/CAN总线发送开门信号
- 门控开关直接提供车门状态信号
- 环境光传感器检测环境亮度(通过网关中转)
BCM中央处理
- TC397T芯片的BCM接收所有输入信号
- 判断条件(如:夜间+车门开启)满足时
- 通过PWM信号输出调光指令
照明执行与反馈
- 照地灯驱动电路响应PWM信号
- 电流检测模块实时监控工作状态
- 最终状态通过网关反馈至仪表盘显示
系统特性
- 采用LIN/CAN总线减少线束复杂度
- PWM实现无级调光
- 形成完整的闭环控制(触发→执行→反馈)
该系统实现了根据环境条件和车辆状态自动控制照地灯的功能,典型应用场景包括夜间解锁车辆时自动点亮迎宾照明。
控制流程图:
流程图简述过程:
- 触发条件:PEPS(无钥匙进入系统)发送解锁信号,启动流程。
- 环境光检测:系统检查环境光是否低于50lux(昏暗环境)。
- 若满足,BCM(车身控制模块)发送控制指令。
- 灯光渐亮:驱动器通过PWM(脉宽调制)信号控制车灯逐渐亮起。
- 电流检测:监测灯组工作电流是否在0.5-1A的正常范围内。
- 正常:维持灯光点亮状态。
- 异常:立即关闭灯光并记录故障码(DTC)。
- 关闭条件:
- 灯光点亮满30秒,或检测到车门关闭时,驱动器控制灯光渐暗关闭。
关键点:流程实现了昏暗环境下的自动渐亮/渐灭控制,并通过电流检测保障安全性,异常时记录故障以便诊断。
4.3 需求分析
4.3.1 系统需求
1. 硬件需求
| 模块 | 技术要求 | 验证方法 |
|---|---|---|
| 驱动电路 | 恒流驱动(如TPS92662,输出350mA±5%) | 85℃满载老化测试 |
| 光学组件 | 菲涅尔透镜(散射角≥120°) | 配光屏幕测试 |
| 防护等级 | IP67(门板下方安装) | ISO 20653防水测试 |
2. 软件需求
| 功能 | 实现方式 | 性能指标 |
|---|---|---|
| 渐变控制 | 16-bit PWM分辨率(0.1%亮度步进) | 渐亮时间1.5s±0.2s |
| 节能模式 | 蓄电池电压<12V时关闭 | 响应时间≤100ms |
| 诊断功能 | LED开路/短路检测(±10mA精度) | 故障识别率≥99% |
4.3.2 功能安全需求(ISO 26262 ASIL A)
1. 安全机制
| 故障模式 | 检测方法 | 安全响应 | FTTI |
|---|---|---|---|
| 意外常亮 | 电流持续>1A超过5分钟 | 强制断电+熔断器动作 | 5min |
| 短路保护 | 电流>2A持续10ms | 关闭驱动并记录DTC | 10ms |
| 信号失效 | PEPS信号超时(>1s) | 使用最后有效状态 | 1s |
2. FTA分析片段
顶事件:照地灯非预期常亮(10^-6/h)
├─ 硬件故障(40%)
│ ├─ MOSFET失效(60%)→冗余驱动
│ └─ 线束短路(40%)→PPTC自恢复保险丝
└─ 软件故障(60%)
├─ 定时器溢出(70%)→硬件看门狗
└─ 内存错误(30%)→ECC校验
4.3.3 关联功能需求
1. 与门控系统的协同
// 开门延长照明逻辑
void door_open_extension() {
if (door_ajar && timer_remaining < 10s) {
reset_timer(30s); // 车门未关重置定时
}
}
2. 与车身网络的交互
| 信号 | 源模块 | 功能 |
|---|---|---|
| 蓄电池状态 | BMS | 低电量时禁止照明 |
| 防盗报警状态 | 防盗模块 | 触发报警时闪烁警示 |
3. 个性化功能
5 车外灯光迎宾
5.1 车外灯光迎宾(Welcome Lighting)核心作用与功能
1. 基础功能
| 功能 | 技术参数 | 法规标准 | 用户体验价值 |
|---|---|---|---|
| 迎宾照明 | 渐亮/渐暗(1-3秒),色温4000-6000K | OEM自定义 | 提升品牌高级感 |
| 车辆定位辅助 | 照射范围5-10m(含LOGO投影) | - | 夜间快速定位车辆 |
| 安全警示 | 车门解锁时激活侧向警示照明 | GB 23254-2009 | 预防"开门杀"事故 |
2. 扩展功能
# 智能迎宾场景逻辑示例
def welcome_lighting_scenes():
if PEPS_unlock and ambient_light < 100lux:
activate_sequence(
daytime_running_light(70%),
logo_projector(),
puddle_light(100%),
duration=2.5s
)
elif app_remote_start: # 手机远程启动
trigger_pulsing_effect(3_times)
5.2 控制实现方案
以下是简化的过程说明:
信号输入:
- PEPS模块(无钥匙进入系统)通过CAN FD总线向BCM(车身控制模块/TC397T芯片)发送解锁/启动信号。
- 环境光传感器检测环境亮度,数据可能通过LIN或直接输入到PEPS/BCM。
BCM处理:
- BCM综合PEPS的指令、环境光数据及用户配置系统(如自动大灯设置)的信息,决定灯光控制策略。
- 用户配置可能通过网关(如中控系统)传递给BCM。
输出控制:
- BCM通过LIN或PWM信号控制灯光驱动器,调节大灯/内饰灯的开关或亮度。
- 灯光驱动器的电流检测模块实时反馈工作状态至BCM。
状态反馈:
- BCM将灯光状态(如故障、开启状态)通过网关传递至仪表盘显示,通知驾驶员。
总结:系统通过多总线(CAN FD/LIN/PWM)协同,实现从用户操作/环境感知到灯光驱动的闭环控制,同时提供状态可视化。
控制流程图:
该流程图描述了智能车灯系统的控制过程,具体分为以下步骤:
触发阶段
系统通过三种方式触发:PEPS解锁(无钥匙进入)、手机蓝牙靠近或远程启动,对应不同灯光场景(渐亮日行灯+照地灯、呼吸灯效或全灯序列激活)。执行与监控
- 执行对应灯光场景后,系统实时监测电流和温度。
- 若检测到异常(如过流/过热),立即关闭灯光并记录故障码(DTC);正常则维持当前场景。
- 结束阶段
灯光场景完成后,系统自动渐暗关闭或切换至近光灯模式。
核心逻辑:多触发源→场景执行→安全监控→智能收尾,兼顾个性化和可靠性。
5.3 需求分析
5.3.1 系统需求
1. 硬件需求
| 模块 | 技术要求 | 验证方法 |
|---|---|---|
| 驱动芯片 | 多通道LED驱动(如TPS929120,12通道) | AEC-Q100 Grade 1认证 |
| 投影模块 | 激光LOGO投影(分辨率≥100PPI) | 20,000小时寿命测试 |
| EMC设计 | 辐射发射<28dBμV/m(CISPR 25 Class B) | 电波暗室测试 |
2. 软件需求
| 功能 | 实现方式 | 性能指标 |
|---|---|---|
| 场景引擎 | 基于时间轴的灯光序列控制 | 同步误差≤10ms |
| 个性化配置 | 支持APP自定义场景(颜色/顺序/时长) | 存储100组用户配置 |
| 能量管理 | 蓄电池电压<12V时禁用非必要照明 | 响应时间≤50ms |
5.3.2 功能安全需求(ISO 26262 ASIL B)
1. 安全机制
| 故障模式 | 检测方法 | 安全响应 | FTTI |
|---|---|---|---|
| 场景冲突 | 多场景同时请求 | 按优先级执行(PEPS>手机>钥匙) | 20ms |
| 过热保护 | 温度>85℃持续10s | 关闭投影模块 | 10s |
| 通信劫持 | CAN ID异常 | 激活硬件防火墙 | 5ms |
2. FTA定量分析
顶事件:迎宾灯光非预期常亮(10^-7/h)
├─ 供电故障(30%)
│ ├─ 继电器粘连(λ=0.1 FIT)→磁保持继电器
│ └─ 线束短路(λ=0.05 FIT)→自恢复保险丝
└─ 控制故障(70%)
├─ 场景引擎死锁(λ=0.4 FIT)→硬件看门狗
└─ 用户配置错误(λ=0.3 FIT)→CRC校验
5.3.3 关联功能需求
1. 与车身系统的协同
// 雨天模式联动
void rain_mode_adjust() {
if (rain_sensor > 50%) {
disable_logo_projector(); // 关闭投影防短路
increase_puddle_light(150%); // 增强地面照明
}
}
2. 多系统交互矩阵
| 关联系统 | 交互信号 | 控制逻辑 |
|---|---|---|
| 智能钥匙系统 | 用户距离RSSI值 | 20米内启动预迎宾 |
| 车载充电系统 | 充电枪插入状态 | 禁用迎宾灯光(防干扰) |
| 防盗系统 | 非法入侵报警 | 触发SOS闪烁模式 |
3. 个性化服务接口
6 总结
以上对外灯的倒车灯、角灯、照地灯以及车外灯光迎宾的功能、实现方案以及需求进行介绍相关介绍;至此,车身域控外灯模块的基本功能以及原理已经基本上进行了详细介绍,有利于后续充分认识并深入理解车身域控的功能和原理。欢迎大家留言交流!