import torch
import torch.nn as nn
import torch.optim as optim
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import MinMaxScaler
import time
import matplotlib.pyplot as plt
from tqdm import tqdm # 导入tqdm库用于进度条显示
import warnings
warnings.filterwarnings("ignore") # 忽略警告信息
# 设置GPU设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")
# 加载鸢尾花数据集
iris = load_iris()
X = iris.data # 特征数据
y = iris.target # 标签数据
# 划分训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
# 归一化数据
scaler = MinMaxScaler()
X_train = scaler.fit_transform(X_train)
X_test = scaler.transform(X_test)
# 将数据转换为PyTorch张量并移至GPU
X_train = torch.FloatTensor(X_train).to(device)
y_train = torch.LongTensor(y_train).to(device)
X_test = torch.FloatTensor(X_test).to(device)
y_test = torch.LongTensor(y_test).to(device)
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.fc1 = nn.Linear(4, 10) # 输入层到隐藏层
self.relu = nn.ReLU()
self.fc2 = nn.Linear(10, 3) # 隐藏层到输出层
def forward(self, x):
out = self.fc1(x)
out = self.relu(out)
out = self.fc2(out)
return out
# 实例化模型并移至GPU
model = MLP().to(device)
# 分类问题使用交叉熵损失函数
criterion = nn.CrossEntropyLoss()
# 使用随机梯度下降优化器
optimizer = optim.SGD(model.parameters(), lr=0.01)
# 训练模型
num_epochs = 20000 # 训练的轮数
# 用于存储每100个epoch的损失值和对应的epoch数
losses = []
epochs = []
start_time = time.time() # 记录开始时间
# 创建tqdm进度条
with tqdm(total=num_epochs, desc="训练进度", unit="epoch") as pbar:
# 训练模型
for epoch in range(num_epochs):
# 前向传播
outputs = model(X_train) # 隐式调用forward函数
loss = criterion(outputs, y_train)
# 反向传播和优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 记录损失值并更新进度条
if (epoch + 1) % 200 == 0:
losses.append(loss.item())
epochs.append(epoch + 1)
# 更新进度条的描述信息
pbar.set_postfix({'Loss': f'{loss.item():.4f}'})
# 每1000个epoch更新一次进度条
if (epoch + 1) % 1000 == 0:
pbar.update(1000) # 更新进度条
# 确保进度条达到100%
if pbar.n < num_epochs:
pbar.update(num_epochs - pbar.n) # 计算剩余的进度并更新
time_all = time.time() - start_time # 计算训练时间
print(f'Training time: {time_all:.2f} seconds')
# 可视化损失曲线
plt.figure(figsize=(10, 6))
plt.plot(epochs, losses)
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('Training Loss over Epochs')
plt.grid(True)
plt.show()
# 在测试集上评估模型,此时model内部已经是训练好的参数了
# 评估模型
model.eval() # 设置模型为评估模式
with torch.no_grad(): # torch.no_grad()的作用是禁用梯度计算,可以提高模型推理速度
outputs = model(X_test) # 对测试数据进行前向传播,获得预测结果
_, predicted = torch.max(outputs, 1) # torch.max(outputs, 1)返回每行的最大值和对应的索引
#这个函数返回2个值,分别是最大值和对应索引,参数1是在第1维度(行)上找最大值,_ 是Python的约定,表示忽略这个返回值,所以这个写法是找到每一行最大值的下标
# 此时outputs是一个tensor,p每一行是一个样本,每一行有3个值,分别是属于3个类别的概率,取最大值的下标就是预测的类别
# predicted == y_test判断预测值和真实值是否相等,返回一个tensor,1表示相等,0表示不等,然后求和,再除以y_test.size(0)得到准确率
# 因为这个时候数据是tensor,所以需要用item()方法将tensor转化为Python的标量
# 之所以不用sklearn的accuracy_score函数,是因为这个函数是在CPU上运行的,需要将数据转移到CPU上,这样会慢一些
# size(0)获取第0维的长度,即样本数量
correct = (predicted == y_test).sum().item() # 计算预测正确的样本数
accuracy = correct / y_test.size(0)
print(f'测试集准确率: {accuracy * 100:.2f}%')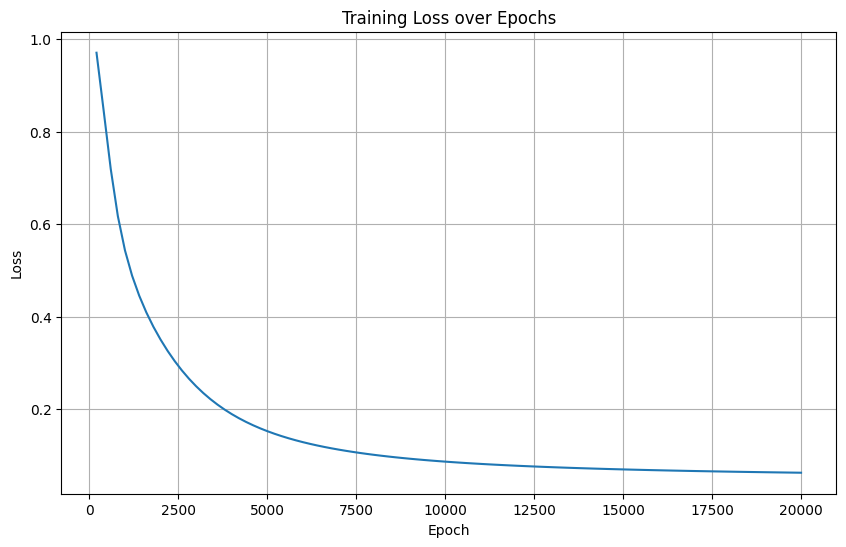
测试集准确率: 96.67%
训练集的loss在下降,但是有可能出现过拟合现象,所以我们想同步打印测试集的loss,以判断是否出现过拟合现象。
判断是否过拟合
import torch
import torch.nn as nn
import torch.optim as optim
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import MinMaxScaler
import time
import matplotlib.pyplot as plt
from tqdm import tqdm # 导入tqdm库用于进度条显示
import warnings
warnings.filterwarnings("ignore") # 忽略警告信息
# 设置GPU设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")
# 加载鸢尾花数据集
iris = load_iris()
X = iris.data # 特征数据
y = iris.target # 标签数据
# 划分训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
# 归一化数据
scaler = MinMaxScaler()
X_train = scaler.fit_transform(X_train)
X_test = scaler.transform(X_test)
# 将数据转换为PyTorch张量并移至GPU
X_train = torch.FloatTensor(X_train).to(device)
y_train = torch.LongTensor(y_train).to(device)
X_test = torch.FloatTensor(X_test).to(device)
y_test = torch.LongTensor(y_test).to(device)
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.fc1 = nn.Linear(4, 10) # 输入层到隐藏层
self.relu = nn.ReLU()
self.fc2 = nn.Linear(10, 3) # 隐藏层到输出层
def forward(self, x):
out = self.fc1(x)
out = self.relu(out)
out = self.fc2(out)
return out
# 实例化模型并移至GPU
model = MLP().to(device)
# 分类问题使用交叉熵损失函数
criterion = nn.CrossEntropyLoss()
# 使用随机梯度下降优化器
optimizer = optim.SGD(model.parameters(), lr=0.01)
# 训练模型
num_epochs = 20000 # 训练的轮数
# 用于存储每200个epoch的损失值和对应的epoch数
train_losses = [] # 存储训练集损失
test_losses = [] # 新增:存储测试集损失
epochs = []
start_time = time.time() # 记录开始时间
# 创建tqdm进度条
with tqdm(total=num_epochs, desc="训练进度", unit="epoch") as pbar:
# 训练模型
for epoch in range(num_epochs):
# 前向传播
outputs = model(X_train) # 隐式调用forward函数
train_loss = criterion(outputs, y_train)
# 反向传播和优化
optimizer.zero_grad()
train_loss.backward()
optimizer.step()
# 记录损失值并更新进度条
if (epoch + 1) % 200 == 0:
# 计算测试集损失,新增代码
model.eval()
with torch.no_grad():
test_outputs = model(X_test)
test_loss = criterion(test_outputs, y_test)
model.train()
train_losses.append(train_loss.item())
test_losses.append(test_loss.item())
epochs.append(epoch + 1)
# 更新进度条的描述信息
pbar.set_postfix({'Train Loss': f'{train_loss.item():.4f}', 'Test Loss': f'{test_loss.item():.4f}'})
# 每1000个epoch更新一次进度条
if (epoch + 1) % 1000 == 0:
pbar.update(1000) # 更新进度条
# 确保进度条达到100%
if pbar.n < num_epochs:
pbar.update(num_epochs - pbar.n) # 计算剩余的进度并更新
time_all = time.time() - start_time # 计算训练时间
print(f'Training time: {time_all:.2f} seconds')
# 可视化损失曲线
plt.figure(figsize=(10, 6))
plt.plot(epochs, train_losses, label='Train Loss') # 原始代码已有
plt.plot(epochs, test_losses, label='Test Loss') # 新增:测试集损失曲线
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('Training and Test Loss over Epochs')
plt.legend() # 新增:显示图例
plt.grid(True)
plt.show()
# 在测试集上评估模型,此时model内部已经是训练好的参数了
# 评估模型
model.eval() # 设置模型为评估模式
with torch.no_grad(): # torch.no_grad()的作用是禁用梯度计算,可以提高模型推理速度
outputs = model(X_test) # 对测试数据进行前向传播,获得预测结果
_, predicted = torch.max(outputs, 1) # torch.max(outputs, 1)返回每行的最大值和对应的索引
correct = (predicted == y_test).sum().item() # 计算预测正确的样本数
accuracy = correct / y_test.size(0)
print(f'测试集准确率: {accuracy * 100:.2f}%') 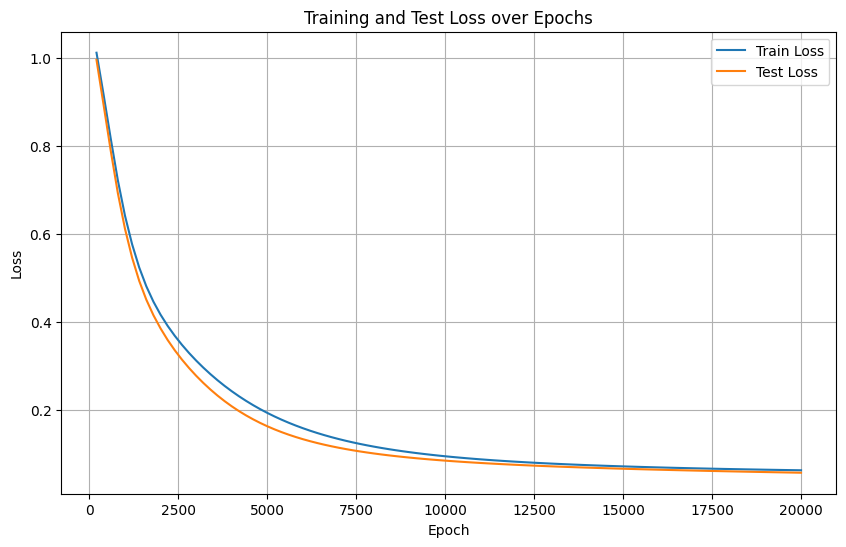
测试集准确率: 96.67%
打印测试集的loss和同步打印测试集的评估指标是一个逻辑,但是打印loss可以体现在一个图中。显然上图没有出现过拟合现象。
模型的保存和加载
深度学习中模型的保存与加载主要涉及参数(权重)和整个模型结构的存储,同时需兼顾训练状态(如优化器参数、轮次等)以支持断点续训。
仅保存模型参数(推荐)
- 原理:保存模型的权重参数,不保存模型结构代码。加载时需提前定义与训练时一致的模型类。
- 优点:文件体积小(仅含参数),跨框架兼容性强(需自行定义模型结构)。
# 保存模型参数
torch.save(model.state_dict(), "model_weights.pth")
# 加载参数(需先定义模型结构)
model = MLP() # 初始化与训练时相同的模型结构
model.load_state_dict(torch.load("model_weights.pth"))
# model.eval() # 切换至推理模式(可选)保存模型+权重
- 原理:保存模型结构及参数
- 优点:加载时无需提前定义模型类
- 缺点:文件体积大,依赖训练时的代码环境(如自定义层可能报错)。
# 保存整个模型
torch.save(model, "full_model.pth")
# 加载模型(无需提前定义类,但需确保环境一致)
model = torch.load("full_model.pth")
model.eval() # 切换至推理模式(可选)保存训练状态(断点续训)
- 原理:保存模型参数、优化器状态(学习率、动量)、训练轮次、损失值等完整训练状态,用于中断后继续训练。
- 适用场景:长时间训练任务(如分布式训练、算力中断)。
# # 保存训练状态
# checkpoint = {
# "model_state_dict": model.state_dict(),
# "optimizer_state_dict": optimizer.state_dict(),
# "epoch": epoch,
# "loss": best_loss,
# }
# torch.save(checkpoint, "checkpoint.pth")
# # 加载并续训
# model = MLP()
# optimizer = torch.optim.Adam(model.parameters())
# checkpoint = torch.load("checkpoint.pth")
# model.load_state_dict(checkpoint["model_state_dict"])
# optimizer.load_state_dict(checkpoint["optimizer_state_dict"])
# start_epoch = checkpoint["epoch"] + 1 # 从下一轮开始训练
# best_loss = checkpoint["loss"]
# # 继续训练循环
# for epoch in range(start_epoch, num_epochs):
# train(model, optimizer, ...)
早停法(early stop)
我们梳理下过拟合的情况
正常情况:训练集和测试集损失同步下降,最终趋于稳定。
过拟合:训练集损失持续下降,但测试集损失在某一时刻开始上升(或不再下降)。
如果可以监控验证集的指标不再变好,此时提前终止训练,避免模型对训练集过度拟合。----监控的对象是验证集的指标。这种策略叫早停法。
import torch
import torch.nn as nn
import torch.optim as optim
from sklearn.datasets import load_iris
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import MinMaxScaler
import time
import matplotlib.pyplot as plt
from tqdm import tqdm # 导入tqdm库用于进度条显示
import warnings
warnings.filterwarnings("ignore") # 忽略警告信息
# 设置GPU设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")
# 加载鸢尾花数据集
iris = load_iris()
X = iris.data # 特征数据
y = iris.target # 标签数据
# 划分训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
# 归一化数据
scaler = MinMaxScaler()
X_train = scaler.fit_transform(X_train)
X_test = scaler.transform(X_test)
# 将数据转换为PyTorch张量并移至GPU
X_train = torch.FloatTensor(X_train).to(device)
y_train = torch.LongTensor(y_train).to(device)
X_test = torch.FloatTensor(X_test).to(device)
y_test = torch.LongTensor(y_test).to(device)
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.fc1 = nn.Linear(4, 10) # 输入层到隐藏层
self.relu = nn.ReLU()
self.fc2 = nn.Linear(10, 3) # 隐藏层到输出层
def forward(self, x):
out = self.fc1(x)
out = self.relu(out)
out = self.fc2(out)
return out
# 实例化模型并移至GPU
model = MLP().to(device)
# 分类问题使用交叉熵损失函数
criterion = nn.CrossEntropyLoss()
# 使用随机梯度下降优化器
optimizer = optim.SGD(model.parameters(), lr=0.01)
# 训练模型
num_epochs = 20000 # 训练的轮数
# 用于存储每200个epoch的损失值和对应的epoch数
train_losses = [] # 存储训练集损失
test_losses = [] # 存储测试集损失
epochs = []
# ===== 新增早停相关参数 =====
best_test_loss = float('inf') # 记录最佳测试集损失
best_epoch = 0 # 记录最佳epoch
patience = 50 # 早停耐心值(连续多少轮测试集损失未改善时停止训练)
counter = 0 # 早停计数器
early_stopped = False # 是否早停标志
# ==========================
start_time = time.time() # 记录开始时间
# 创建tqdm进度条
with tqdm(total=num_epochs, desc="训练进度", unit="epoch") as pbar:
# 训练模型
for epoch in range(num_epochs):
# 前向传播
outputs = model(X_train) # 隐式调用forward函数
train_loss = criterion(outputs, y_train)
# 反向传播和优化
optimizer.zero_grad()
train_loss.backward()
optimizer.step()
# 记录损失值并更新进度条
if (epoch + 1) % 200 == 0:
# 计算测试集损失
model.eval()
with torch.no_grad():
test_outputs = model(X_test)
test_loss = criterion(test_outputs, y_test)
model.train()
train_losses.append(train_loss.item())
test_losses.append(test_loss.item())
epochs.append(epoch + 1)
# 更新进度条的描述信息
pbar.set_postfix({'Train Loss': f'{train_loss.item():.4f}', 'Test Loss': f'{test_loss.item():.4f}'})
# ===== 新增早停逻辑 =====
if test_loss.item() < best_test_loss: # 如果当前测试集损失小于最佳损失
best_test_loss = test_loss.item() # 更新最佳损失
best_epoch = epoch + 1 # 更新最佳epoch
counter = 0 # 重置计数器
# 保存最佳模型
torch.save(model.state_dict(), 'best_model.pth')
else:
counter += 1
if counter >= patience:
print(f"早停触发!在第{epoch+1}轮,测试集损失已有{patience}轮未改善。")
print(f"最佳测试集损失出现在第{best_epoch}轮,损失值为{best_test_loss:.4f}")
early_stopped = True
break # 终止训练循环
# ======================
# 每1000个epoch更新一次进度条
if (epoch + 1) % 1000 == 0:
pbar.update(1000) # 更新进度条
# 确保进度条达到100%
if pbar.n < num_epochs:
pbar.update(num_epochs - pbar.n) # 计算剩余的进度并更新
time_all = time.time() - start_time # 计算训练时间
print(f'Training time: {time_all:.2f} seconds')
# ===== 新增:加载最佳模型用于最终评估 =====
if early_stopped:
print(f"加载第{best_epoch}轮的最佳模型进行最终评估...")
model.load_state_dict(torch.load('best_model.pth'))
# ================================
# 可视化损失曲线
plt.figure(figsize=(10, 6))
plt.plot(epochs, train_losses, label='Train Loss')
plt.plot(epochs, test_losses, label='Test Loss')
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('Training and Test Loss over Epochs')
plt.legend()
plt.grid(True)
plt.show()
# 在测试集上评估模型
model.eval()
with torch.no_grad():
outputs = model(X_test)
_, predicted = torch.max(outputs, 1)
correct = (predicted == y_test).sum().item()
accuracy = correct / y_test.size(0)
print(f'测试集准确率: {accuracy * 100:.2f}%') # ===== 新增早停相关参数 =====
best_test_loss = float('inf') # 记录最佳测试集损失
best_epoch = 0 # 记录最佳epoch
patience = 50 # 早停耐心值(连续x轮测试集损失未改善时停止训练)
counter = 0 # 早停计数器 连续没提高的次数x就是早停计数器
early_stopped = False # 是否早停标志
# ===== 新增早停逻辑 =====
if test_loss.item() < best_test_loss: # 如果当前测试集损失小于最佳损失
best_test_loss = test_loss.item() # 更新最佳损失
best_epoch = epoch + 1 # 更新最佳epoch
counter = 0 # 重置计数器
# 保存最佳模型
torch.save(model.state_dict(), 'best_model.pth')
else:
counter += 1
if counter >= patience:
print(f"早停触发!在第{epoch+1}轮,测试集损失已有{patience}轮未改善。")
print(f"最佳测试集损失出现在第{best_epoch}轮,损失值为{best_test_loss:.4f}")
early_stopped = True
break # 终止训练循环
# ===== 新增:加载最佳模型用于最终评估 =====
if early_stopped:
print(f"加载第{best_epoch}轮的最佳模型进行最终评估...")
model.load_state_dict(torch.load('best_model.pth'))
上述早停策略的具体逻辑如下
- 首先初始一个计数器counter。
- 每 200 轮训练执行一次判断:比较当前损失与历史最佳损失。
- 若当前损失更低,保存模型参数。
- 若当前损失更高或相等,计数器加 1。
- 若计数器达到最大容许的阈值patience,则停止训练。

之所以设置阈值patience,是因为训练过程中存在波动,不能完全停止训练。同时每隔固定的训练轮次都会保存模型参数,下次可以接着这里训练,缩小训练的范围。
实际上,在早停策略中,保存 checkpoint(检查点) 是更优选择,因为它不仅保存了模型参数,还记录了训练状态(如优化器参数、轮次、损失值等),一但出现了过拟合,方便后续继续训练。