此练习主要是:关于滞后补偿器。
①滞后补偿器作用;
②不同滞后补偿器的效果;
一、为什么使用滞后补偿器
- 滞后补偿器:主要用于改善系统的稳态误差;
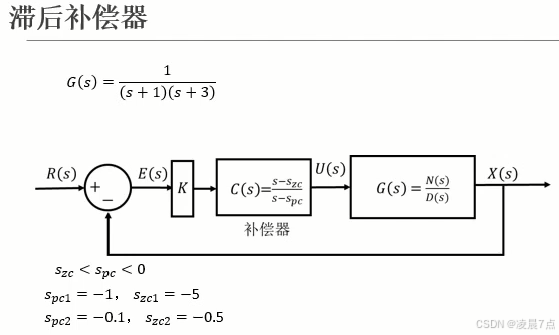
- 滞后补偿器设计思路:同时为系统增加一个极点和零点,与超前补偿器不同的是,滞后补偿器的极点的位置比零点更加靠近虚轴;
- 选取两组不同滞后补偿器,如图所示;
- 因为,两组滞后补偿器,零点极点的比值是一致的,所以改善稳态误差的效果是一致的;但是,由于位置很不同,所以对系统的瞬态响应有很大影响。
- 在matlab中,绘制对应的根轨迹,以及闭环系统的单位阶跃响应。
- 代码如下:
clc;clear;close all;
%% 定义G(s)
s = tf('s');
G_s = 1/((s+1)*(s+3));
K = 2;
t = 0:0.1:20;
%% 绘制原传递函数根轨迹及其响应
subplot(3,2,1);
rlocus(G_s);
title('原系统根轨迹');
subplot(3,2,2);
sys_1 = feedback(K*G_s, 1);
step (sys_1,t);
title('原系统单位阶跃响应');
%%%% 定义补偿器C1(s)
sz = -5;
sp = -1;
C1_s = (s-sz)/(s-sp);
%% 使用补偿器C1(s)后的根轨迹及其响应
subplot(3,2,3);
rlocus(G_s*C1_s);
title('增加滞后补偿器C1系统根轨迹');
subplot(3,2,4);
sys_2 = feedback(K*G_s*C1_s, 1);
step (sys_2,t);
title('增加滞后补偿器C1系统单位阶跃响应');
%%%% 定义补偿器C2(s)
sz = -0.5;
sp = -0.1;
C2_s = (s-sz)/(s-sp);
%% 使用补偿器C1(s)后的根轨迹及其响应
subplot(3,2,5);
rlocus(G_s*C2_s);
title('增加滞后补偿器C2系统根轨迹');
subplot(3,2,6);
sys_3 = feedback(K*G_s*C2_s, 1);
step (sys_3,t);
title('增加滞后补偿器C2系统单位阶跃响应');
二、运行结果及分析
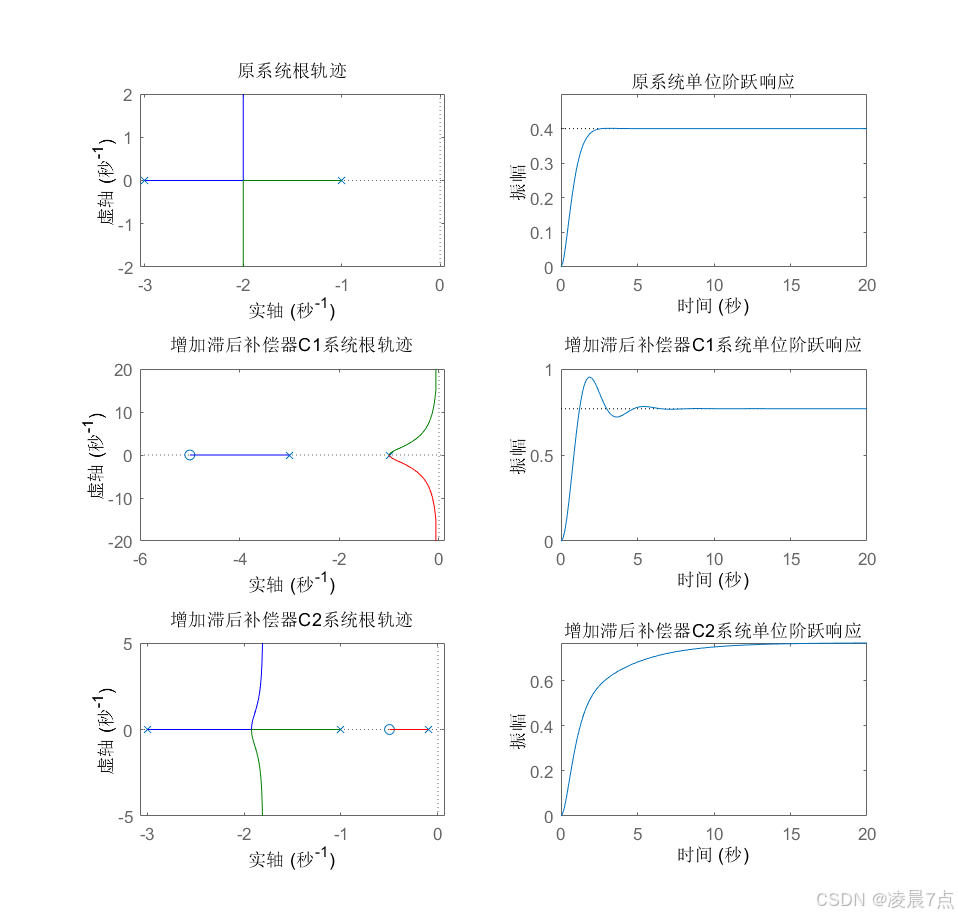
1、从原系统图:
- 原系统单位阶跃响应,最终将系统稳定在0.4左右,所以稳态误差是1-0.4=0.6;
2、增加补偿器C1系统图:sz=-5;sp=-1;
- 增加C1补偿器系统单位阶跃响应,最终将系统稳定在0.8左右,所以稳态误差是1-0.8=0.2;
- 当增加C1:sz=-5;sp=-1;此时完全改变了原因系统的根轨迹方向,因此,此时的单位阶跃响应就会与原系统很不同;
3、增加补偿器C2系统图:sz=-0.5;sp=-0.1;
- 增加C2补偿器系统单位阶跃响应,最终将系统稳定在0.8左右,所以稳态误差是1-0.8=0.2;
- 当增加C2:sz=-0.5;sp=-0.1;此时只是增加了一条由x=-0.1指向x=-0.5的根轨迹,对原来根轨迹影响比较小,当前根轨迹还很一致,只是增加一条距离虚轴很近的根轨迹,因此,此时的单位阶跃响应就会与原系统比较类似;
4、总体来看
发现,增加C1和C2滞后补偿器,最后的曲线截然不同。
当增加C1滞后补偿器,就完全不同了,sz=-5;sp=-1;这对零极点就完全改变原有根轨迹的形态了,所以响应也就完全不同。
当增加C2滞后补偿器,可以看出,从0上升到0.4的过程,几乎和原系统一致,只是从0.4之后,再通过sz=-0.5;sp=-0.1;这对零极点来修正稳态误差。
学习来源:《控制之美》[卷1],王天威