我想做一个单机版的自主学习和自动部署模型的智能双臂机器人,
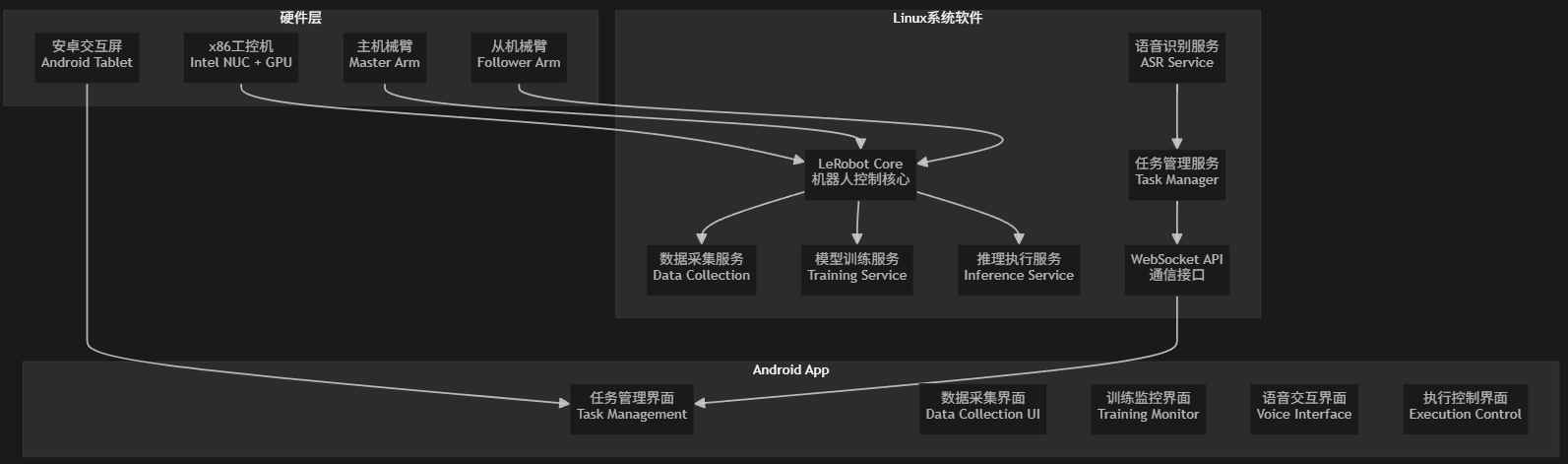
产品的硬件部分包括 主机械臂、从机械臂、含GPU的x86工控机,安卓人机交互一体屏。
需要开发linux系统中的软件和android App。
作为单机版的智能双臂机器人,需要用户能够进行傻瓜操作和快速部署落地。
机器人内部基于Lerobot开源框架,实现了训练服务、数据采集服务、模型推理服务、语音识别交互服务等。
用户开发安卓APP,点击创建新任务,输入任务的名称和数据集相关信息,并点击开始采集数据,可以不断采集数据,数据的视频会实时显示在安卓屏幕上。进行多轮数据采集后,点击结束采集。数据采集服务会对数据进行实时处理和存储。
用户点击训练按钮,设置训练的策略和轮次,开始训练,APP会实时显示训练的进度条,训练完成后会自动将模型保存并自动完成一个智能任务的部署。
用户可以点击应用该模型,便可马上启用这个技能,同时通过语言对话服务实现多模态交互操作。
🎯 产品架构总览
📋 详细实现流程
阶段1:硬件集成与LeRobot适配
1.1 创建自定义机器人配置
# src/lerobot/robots/custom_dual_arm/robot.py
class CustomDualArmRobot(Robot):
def __init__(self, config):
super().__init__(config)
self.master_arm = self._init_master_arm()
self.follower_arm = self._init_follower_arm()
def connect(self):
# 连接主从机械臂
pass
def teleop_step(self, action):
# 遥操作步骤
pass
1.2 电机和传感器集成
# 基于LeRobot的电机总线系统
from lerobot.motors.motors_bus import MotorsBus
from lerobot.cameras.camera import Camera
class CustomMotorsBus(MotorsBus):
# 适配自定义电机协议
pass
class CustomCamera(Camera):
# 适配自定义相机
pass
阶段2:Linux系统软件开发
2.1 核心服务架构
# services/robot_service.py
class RobotService:
def __init__(self):
self.robot = None
self.data_collector = DataCollectionService()
self.trainer = TrainingService()
self.inference = InferenceService()
self.task_manager = TaskManager()
async def initialize_robot(self):
# 初始化机器人硬件
pass
async def start_data_collection(self, task_id):
# 开始数据采集
pass
2.2 数据采集服务
# services/data_collection_service.py
class DataCollectionService:
def __init__(self):
self.buffer = OnlineBuffer()
self.recording = False
async def start_recording(self, task_name):
"""开始记录演示数据"""
self.recording = True
# 基于LeRobot的数据采集流程
dataset = self._create_dataset(task_name)
while self.recording:
# 获取机器人状态和相机图像
observation = await self._get_observation()
action = await self._get_action()
# 保存到数据集
dataset.add_frame(observation, action)
def stop_recording(self):
self.recording = False
return self._save_dataset()
2.3 模型训练服务
# services/training_service.py
class TrainingService:
def __init__(self):
self.training_process = None
async def train_model(self, dataset_path, task_config):
"""基于LeRobot训练模型"""
# 使用LeRobot的训练配置
train_config = TrainPipelineConfig(
policy_name="act", # 或其他策略
dataset_repo_id=dataset_path,
training_steps=10000,
# ... 其他配置
)
# 启动训练进程
self.training_process = await self._start_training_process(train_config)
def get_training_progress(self):
"""获取训练进度"""
if self.training_process:
return self._parse_training_logs()
2.4 推理执行服务
# services/inference_service.py
class InferenceService:
def __init__(self):
self.loaded_models = {}
async def load_model(self, model_path, task_name):
"""加载训练好的模型"""
policy = PreTrainedPolicy.from_pretrained(model_path)
self.loaded_models[task_name] = policy
async def execute_task(self, task_name, duration=None):
"""执行指定任务"""
if task_name not in self.loaded_models:
raise ValueError(f"Model for task {task_name} not loaded")
policy = self.loaded_models[task_name]
# 执行推理循环
for step in range(duration or 1000):
observation = await self._get_current_observation()
action = policy.select_action(observation)
await self._execute_action(action)
2.5 语音识别与NLP服务
# services/voice_service.py
class VoiceService:
def __init__(self):
self.asr_model = self._load_asr_model()
self.nlp_processor = self._load_nlp_model()
async def process_voice_command(self, audio_data):
"""处理语音指令"""
# 语音转文字
text = self.asr_model.transcribe(audio_data)
# 意图识别和任务映射
intent = self.nlp_processor.extract_intent(text)
task_name = self._map_intent_to_task(intent)
return {
"text": text,
"intent": intent,
"task_name": task_name
}
2.6 WebSocket API服务
# api/websocket_server.py
from fastapi import FastAPI, WebSocket
import asyncio
app = FastAPI()
class WebSocketManager:
def __init__(self):
self.active_connections = []
self.robot_service = RobotService()
async def connect(self, websocket: WebSocket):
await websocket.accept()
self.active_connections.append(websocket)
async def handle_message(self, websocket: WebSocket, message: dict):
command = message.get("command")
if command == "start_data_collection":
task_id = message.get("task_id")
await self.robot_service.start_data_collection(task_id)
elif command == "stop_data_collection":
result = await self.robot_service.stop_data_collection()
await websocket.send_json({"type": "data_saved", "data": result})
elif command == "start_training":
config = message.get("config")
await self.robot_service.start_training(config)
elif command == "execute_task":
task_name = message.get("task_name")
await self.robot_service.execute_task(task_name)
@app.websocket("/ws")
async def websocket_endpoint(websocket: WebSocket):
manager = WebSocketManager()
await manager.connect(websocket)
try:
while True:
data = await websocket.receive_json()
await manager.handle_message(websocket, data)
except Exception as e:
print(f"Connection error: {e}")
阶段3:Android App开发
3.1 主界面架构
// MainActivity.kt
class MainActivity : AppCompatActivity() {
private lateinit var webSocketClient: WebSocketClient
private lateinit var taskManager: TaskManager
override fun onCreate(savedInstanceState: Bundle?) {
super.onCreate(savedInstanceState)
setContentView(R.layout.activity_main)
initializeWebSocket()
setupUI()
}
private fun initializeWebSocket() {
webSocketClient = WebSocketClient("ws://localhost:8000/ws")
webSocketClient.connect()
}
}
3.2 任务管理界面
// TaskManagementFragment.kt
class TaskManagementFragment : Fragment() {
private lateinit var taskAdapter: TaskAdapter
private val tasks = mutableListOf<Task>()
override fun onCreateView(inflater: LayoutInflater, container: ViewGroup?, savedInstanceState: Bundle?): View? {
val view = inflater.inflate(R.layout.fragment_task_management, container, false)
setupRecyclerView(view)
setupButtons(view)
return view
}
private fun createNewTask() {
val dialog = CreateTaskDialog()
dialog.setOnTaskCreatedListener { taskName ->
val newTask = Task(taskName, TaskStatus.CREATED)
tasks.add(newTask)
taskAdapter.notifyDataSetChanged()
}
dialog.show(parentFragmentManager, "CreateTaskDialog")
}
}
3.3 数据采集界面
// DataCollectionFragment.kt
class DataCollectionFragment : Fragment() {
private var isRecording = false
private lateinit var recordButton: Button
private lateinit var statusText: TextView
override fun onCreateView(inflater: LayoutInflater, container: ViewGroup?, savedInstanceState: Bundle?): View? {
val view = inflater.inflate(R.layout.fragment_data_collection, container, false)
recordButton = view.findViewById(R.id.record_button)
statusText = view.findViewById(R.id.status_text)
recordButton.setOnClickListener {
if (isRecording) {
stopRecording()
} else {
startRecording()
}
}
return view
}
private fun startRecording() {
isRecording = true
recordButton.text = "停止录制"
statusText.text = "正在录制演示数据..."
// 发送开始录制命令
val message = JSONObject().apply {
put("command", "start_data_collection")
put("task_id", getCurrentTaskId())
}
webSocketClient.send(message.toString())
}
private fun stopRecording() {
isRecording = false
recordButton.text = "开始录制"
statusText.text = "录制完成"
// 发送停止录制命令
val message = JSONObject().apply {
put("command", "stop_data_collection")
}
webSocketClient.send(message.toString())
}
}
3.4 训练监控界面
// TrainingMonitorFragment.kt
class TrainingMonitorFragment : Fragment() {
private lateinit var progressBar: ProgressBar
private lateinit var lossChart: LineChart
private lateinit var startTrainingButton: Button
private fun startTraining() {
val config = TrainingConfig(
policyName = "act",
trainingSteps = 10000,
batchSize = 8,
learningRate = 1e-4
)
val message = JSONObject().apply {
put("command", "start_training")
put("config", config.toJson())
}
webSocketClient.send(message.toString())
// 开始监控训练进度
startProgressMonitoring()
}
private fun startProgressMonitoring() {
val handler = Handler(Looper.getMainLooper())
val runnable = object : Runnable {
override fun run() {
requestTrainingProgress()
handler.postDelayed(this, 1000) // 每秒更新一次
}
}
handler.post(runnable)
}
}
3.5 语音交互界面
// VoiceInteractionFragment.kt
class VoiceInteractionFragment : Fragment() {
private lateinit var speechRecognizer: SpeechRecognizer
private lateinit var voiceButton: ImageButton
private lateinit var responseText: TextView
private fun startVoiceRecognition() {
val intent = Intent(RecognizerIntent.ACTION_RECOGNIZE_SPEECH).apply {
putExtra(RecognizerIntent.EXTRA_LANGUAGE_MODEL, RecognizerIntent.LANGUAGE_MODEL_FREE_FORM)
putExtra(RecognizerIntent.EXTRA_LANGUAGE, Locale.getDefault())
putExtra(RecognizerIntent.EXTRA_PROMPT, "请说出您的指令...")
}
speechRecognizer.startListening(intent)
}
private val recognitionListener = object : RecognitionListener {
override fun onResults(results: Bundle?) {
val matches = results?.getStringArrayList(SpeechRecognizer.RESULTS_RECOGNITION)
if (matches != null && matches.isNotEmpty()) {
val spokenText = matches[0]
processVoiceCommand(spokenText)
}
}
}
private fun processVoiceCommand(command: String) {
val message = JSONObject().apply {
put("command", "process_voice")
put("text", command)
}
webSocketClient.send(message.toString())
}
}
阶段4:系统集成与优化
4.1 系统启动脚本
#!/bin/bash
# start_robot_system.sh
# 启动LeRobot核心服务
cd /opt/lerobot
python -m lerobot.services.robot_service &
# 启动WebSocket API服务
python -m lerobot.api.websocket_server &
# 启动语音服务
python -m lerobot.services.voice_service &
# 等待所有服务启动
sleep 5
echo "机器人系统已启动"
4.2 配置管理
# config/robot_config.yaml
robot:
type: "custom_dual_arm"
master_arm:
port: "/dev/ttyUSB0"
baudrate: 1000000
follower_arm:
port: "/dev/ttyUSB1"
baudrate: 1000000
cameras:
- name: "wrist_cam"
type: "realsense"
resolution: [640, 480]
- name: "top_cam"
type: "opencv"
device_id: 0
training:
default_policy: "act"
default_steps: 10000
checkpoint_frequency: 1000
api:
websocket_port: 8000
max_connections: 10
4.3 数据流优化
# utils/data_pipeline.py
class OptimizedDataPipeline:
def __init__(self):
self.frame_queue = asyncio.Queue(maxsize=100)
self.compression_enabled = True
async def process_frame(self, frame_data):
"""优化的帧处理"""
if self.compression_enabled:
frame_data = self._compress_frame(frame_data)
await self.frame_queue.put(frame_data)
async def batch_save_frames(self):
"""批量保存帧数据"""
batch = []
while len(batch) < 32: # 批量大小
try:
frame = await asyncio.wait_for(self.frame_queue.get(), timeout=0.1)
batch.append(frame)
except asyncio.TimeoutError:
break
if batch:
await self._save_batch_to_disk(batch)
🚀 部署与运维
系统部署流程
- 硬件连接:连接主从机械臂、相机、工控机
- 系统安装:安装Ubuntu + LeRobot + 自定义服务
- 硬件标定:使用LeRobot标定工具标定电机和相机
- 服务启动:启动所有后台服务
- App安装:在安卓屏上安装并配置App
- 系统测试:端到端功能测试
用户操作流程
- 创建任务 → Android App创建新任务
- 数据录入 → 用户演示操作,系统记录数据
- 数据训练 → 系统自动训练模型
- 任务执行 → 语音指令或手动触发执行
- 持续学习 → 根据执行结果优化模型
这个架构充分利用了LeRobot的模块化设计,通过标准化的接口集成自定义硬件,实现了一个完整的商业化智能机械臂产品。