引言: 从协作机械臂到人形机器人,一文拆解主流总线技术选型困局
在机器人技术飞速发展的今天,从工厂流水线上的协作机械臂到科技展会上的人形机器人,它们的“神经系统”——通讯总线,正面临着前所未有的挑战。特斯拉Optimus的精准动作、波士顿动力Atlas的流畅跑跳,背后都是海量数据的高速交互。
然而,许多工程师在项目初期都会陷入同一个困境:面对RS485、CAN/CAN FD、EtherCAT等多种总线方案,究竟该如何选择? 本文将从机器人类型与需求分析出发,深入剖析三大主流总线技术的优劣,不提供“标准答案”,只提供一套科学的选择方法论。
一、机器人类型与通讯需求拆解
不同机器人的自由度、运动复杂度和性能要求,直接决定了其通讯总线的选择方向。下图概括了三种典型机器人的通讯需求与方案选择:
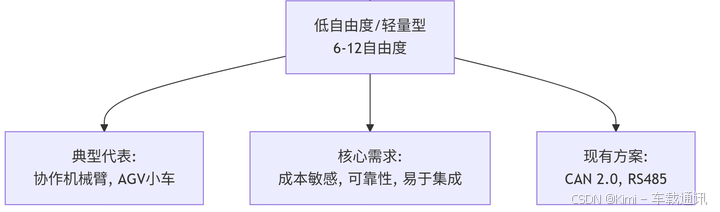
1. 低自由度/轻量型机器人(6-12自由度)
典型代表:协作机械臂、AGV小车、桌面级教育机器人。
核心需求:成本敏感、可靠性、易于集成、适度实时性(毫秒级)。这类机器人节点数相对较少,数据量不大,但对性价比要求极高。
现有主流方案:CAN 2.0, RS485。

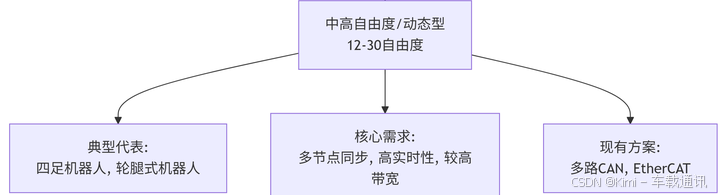
2. 中高自由度/动态型机器人(12-30自由度)
典型代表:四足机器人、轮腿式机器人、高性能机械臂。
核心需求:多节点同步、高实时性(微秒级抖动)、较高带宽、抗干扰能力。例如,四足机器人的12个关节需要实时协调运动以保持平衡,任何指令延迟或抖动都可能导致步态失稳甚至摔倒。
现有主流方案:多路CAN、EtherCAT。

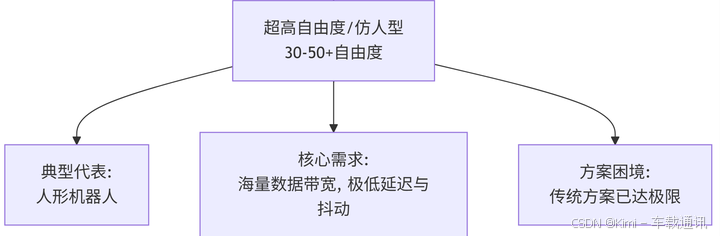
3. 超高自由度/仿人型机器人(30-50+自由度)
典型代表:人形机器人。
核心需求:海量数据带宽、极低延迟与抖动、多总线并行管理能力、极高的可靠性。例如,控制50个自由度的机器人以1kHz频率运行,理论上每秒需处理5万条控制指令+5万条反馈数据,对总线带宽和实时性是极致考验。
现有方案困境:传统单一路CAN或RS485已完全无法满足需求,EtherCAT成本高昂,系统架构设计复杂。

二、三大主流总线技术深度横评

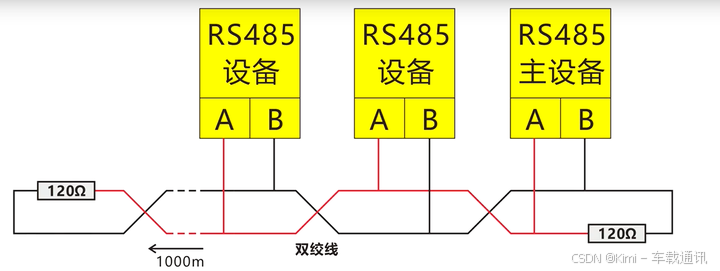
1. RS485(及“高速”变种):经济的入门选择
RS485本质上是一种电气标准,常与Modbus等应用层协议搭配使用。
优势:
- 极低的硬件成本:收发器芯片成本仅为CAN方案的1/3左右。
- 接口简单,传输距离长(可达1.5km)。
- 软件栈简单,开发门槛低。
缺陷与挑战:
- 无硬件仲裁机制:采用主从轮询方式,节点增加时,轮询延迟呈线性增长(20节点延迟超50ms),实时性极差,无法支持多节点同步控制。
- 无硬件错误帧处理:可靠性高度依赖应用层协议,增加了软件复杂性和CPU开销。
- “高速”的代价:波特率提升后(>1Mbps),信号完整性问题突出,布线要求苛刻,工程调试难度大,电磁兼容性(EMC)表现较差(误码率比CAN高1-2数量级)。
典型应用:对实时性要求不高的传感器采集、低速IO控制、成本极度敏感的场景。
案例:宇树科技早期四足机器人 尽管业界对宇树采用RS485有过热议,但其在低成本、低自由度(如Unitree Go1) 机器狗上的成功,恰恰印证了RS485在满足特定成本约束和基本功能需求下的可行性。这更多是一种在成本、功耗、开发周期与性能之间取得的工程平衡,而非技术上的最优解。
2. EtherCAT:高性能的终极方案、一断全断恐成可靠性瓶颈
EtherCAT是一种基于以太网的实时工业以太网协议,以其卓越性能著称。
优势:
- 极高的性能和确定性:采用”Processing on the the Fly”(数据帧在传输中实时处理)技术,从站设备在数据帧通过时直接读取/写入数据,无需等待完整接收;同步精度可达 μs(百纳秒级),1000个从站的通信周期可短至100μs。
- 高效率带宽利用率:单一以太网帧可携带多个从站数据(帧复用),理论上支持大量节点;相比传统Modbus TCP,带宽利用率提升 90%+。
- 灵活的拓扑结构:支持线型、树型、星型混合拓扑(无需交换机),布线成本低。
- 硬件成本优化:从站设备只需低成本ESC芯片(如Beckhoff ET1100),主站可通过标准网卡(需实时驱动)实现。
缺陷与挑战:
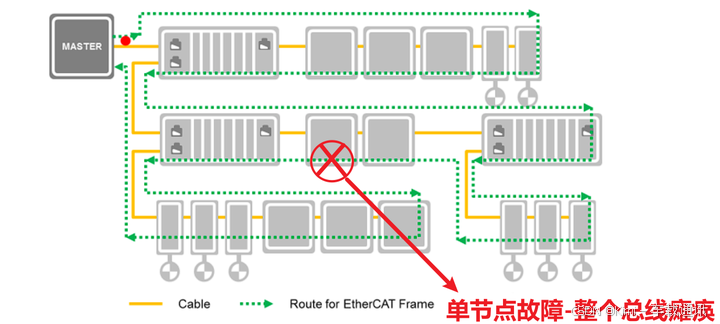
- “一断全断”风险:在线型拓扑中,单一从站故障可能导致整网瘫痪,需复杂的冗余设计来缓解。
- 主站开发复杂度高:需实现精确的DC(分布式时钟)同步算法,对主站CPU实时性要求严苛(通常需Xenomai/RT-Linux)。
- 故障诊断难度大:缺乏标准化的网络流量分析工具。
- 硬件依赖性:从站必须使用专用ESC芯片,无法通过软件模拟;主站网卡需支持IEEE 1588硬件时间戳。
- 生态系统局限:主要依赖德国厂商(Beckhoff、倍福),亚洲地区技术支持较弱。
典型应用:对同步性和实时性要求极端的场景,如多轴伺服同步(CNC/机器人)、高速分布式IO控制。
3. CAN/CAN FD:平衡之选与升级之路
CAN总线以其高可靠性著称,而CAN FD是其面向更高带宽需求的升级版本。
CAN 2.0:成熟的平衡之选
- 优势:完美的平衡性。成本低于EtherCAT,可靠性高(硬件CRC校验、无损仲裁机制),软硬件生态极其成熟,开发资源丰富。
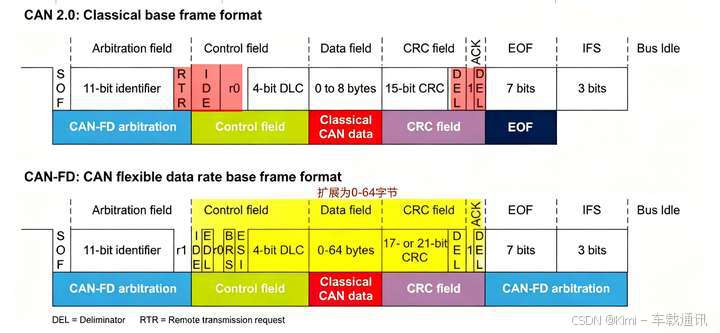
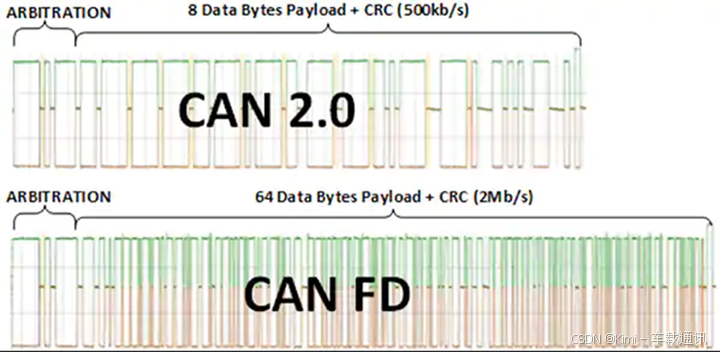
- 缺陷:带宽天花板(1Mbps, 8字节) 是硬伤,限制了其在现代高自由度机器人中的应用。
CAN FD:突破带宽限制的升级之路
优势:
- 继承了CAN 2.0的所有优点(可靠性、生态、成本)。
- 突破带宽限制:数据段速率最高可达12Mbps+,数据长度最多64字节。
- 平滑升级路径:便于从现有CAN 2.0项目迁移。
现阶段应用难点与挑战:
- 波特率配置复杂性:数据段波特率、采样点等参数需要根据网络拓扑精细调优,否则通讯稳定性差。
- 对硬件依赖性增强:高速率对收发器性能、PCB布局布线、电缆质量提出了更高要求。
- 协议设计新挑战:如何利用64字节帧设计高效协议(如打包多电机指令)以最大化带宽效益,需要新的设计思路。
- 多通道扩展需求:主板原生CAN FD接口稀少,如何扩展出稳定、多路、高性能的CAN FD通道是一个系统工程问题。(例如,NXP的MR-CANHUBK344评估板集成了6个CAN FD端口,为移动机器人应用提供了参考设计)
4. 单对双绞线车载以太网在机器人行业的潜在应用前景
在机器人通讯技术快速发展的背景下,基于单对双绞线的车载以太网(如IEEE 802.3bw/bp/ch等标准)正展现出巨大的应用潜力。这种技术融合了传统以太网的高带宽和车载环境要求的可靠性,为下一代机器人系统提供了新的选择。
核心优势:
- 带宽与实时性兼备:提供10Mbps至1Gbps的传输速率(10BASE-T1S、100BASE-T1、1000BASE-T1),同时支持时间敏感网络(TSN)协议,可满足高精度同步控制需求
- 布线简化:单对双绞线结构显著减轻线束重量和体积,非常适合空间受限的机器人应用
- 成本效益:相比传统多对线缆以太网,大幅降低布线成本和复杂度
- 协议统一:基于IP的架构便于与云端、边缘计算和其他智能设备集成
应用场景:
- 人形机器人主干网络:可作为中央控制器与各子系统间的高速数据 backbone
- 多传感器融合:同时传输高清视觉、3D点云、雷达等多模态传感器数据
- 分布式计算架构:连接多个计算单元(如GPU、NPU),实现算力协同
三、总结与展望
下表总结了三种总线技术在关键特性上的定位:
特性维度 |
RS485 |
CAN/CAN FD |
EtherCAT |
单节点成本 |
极低 |
中等 |
高 |
系统实时性 |
差(毫秒级) |
好(微秒级) |
极优(亚微秒级) |
带宽能力 |
低(依赖波特率) |
中(CAN FD大幅提升) |
高 |
可靠性机制 |
弱(依赖软件) |
强(硬件错误处理、多主仲裁) |
强(但拓扑影响大) |
开发难度 |
低 |
中 |
高 |
拓扑灵活性 |
总线型/星型 |
总线型 |
线型、星型、树型 |
典型应用场景 |
低速IO、传感器 |
车载网络、中低自由度机器人 |
多轴伺服同步、高端运动控制 |
核心观点:不存在“唯一最优解”,只有“最适合的方案”。
- RS485是经济的入门选择,适用于对实时性要求不严苛、节点数少、成本极度敏感的场景。
- EtherCAT是高性能的终极方案,适用于对同步性和实时性有极致要求、预算充足、技术实力雄厚的项目。
- CAN FD则是在成本、性能和生态之间取得了最佳平衡点的“升级之路”。它极具潜力成为下一代主流机器人通讯 backbone,但其高速应用仍面临上述需要克服的工程挑战。

预告:那么,如果我们选择了CAN FD这条极具潜力的道路,究竟该如何根据机器人的自由度来具体规划总线架构、计算通讯负载、并解决前文提到的工程挑战呢? 我们将在下一篇文章《规划机器人的CAN FD神经网络:从架构设计到负载计算》中详细探讨。
讨论与思考
- 在您的机器人项目中,最终选择了哪种通讯总线?促使您做出这个决定的关键因素是什么?(是成本、性能、还是开发便利性?)
- 您是否评估过从CAN 2.0升级到CAN FD?过程中遇到的最大障碍是什么?(是硬件成本、协议重新设计、还是稳定性调优?)
- 对于EtherCAT的“一断全断”风险,您在系统设计中有哪些有效的冗余或容错策略?
欢迎在评论区分享您的真知灼见和实践经验!
参考资料与数据来源
- 宇树a1,8010电机自研RS485驱动
- EtherCAT 的优点与缺点
- NXP S32K344:移动机器人评估板,具有100BASE-T1接口和6个CAN FD端口
- NXP Semiconductors 用于移动机器人的MR-CANHUBK344评估板
- “毫秒级”时延!联通5G一体机开启工业与机器人“数智变革”
- 为什么宇树科技的电机通信使用RS485
以上内容仅供参考,实际选型需根据具体项目需求、技术团队能力和预算等因素综合决策。