char a[10];
//char a[]必须上来就得给它赋值,a的指针是不能变的,内容可变
//char*p="diang",*p内容不可修改。不用一上来就赋值。
对char类型详细介绍:深入理解char * ,char ** ,char a[ ] ,char *a[] - Z--Y - 博客园 (cnblogs.com)
//a = "china";
char* p;p = "aufgb";
void fun(char ptr[100]){},sizeof(ptr)=4;
C/C++
C处理过程
- 预处理:宏定义展开、头文件展开、条件编译,这里并不会检查语法.i
- 编译:检查语法,将预处理后文件编译生成.s汇编文件
- 汇编:将汇编文件生成目标文件(.o二进制文件)
- 链接:将目标文件链接为可执行程序.exe
链接
静态链接:代码从其所在的静态链接库中拷贝到最终的可执行程序中,在该程序被执行时,这些代码会被装入到该进程的虚拟地址空间中。
动态链接:代码被放到动态链接库或共享对象的某个目标文件中,链接程序只是在最终的可执行程序中记录了共享对象的名字等一些信息。在程序执行时,动态链接库的全部内容会被映射到运行时相应进行的虚拟地址的空间。
二者的优缺点:
静态链接:浪费空间,每个可执行程序都会有目标文件的一个副本,这样如果目标文件进行了更新操作,就需要重新进行编译链接生成可执行程序(更新困难);优点就是执行的时候运行速度快,因为可执行程序具备了程序运行的所有内容。
动态链接:节省内存、更新方便,但是动态链接是在程序运行时,每次执行都需要链接,相比静态链接会有一定的性能损失。
分区
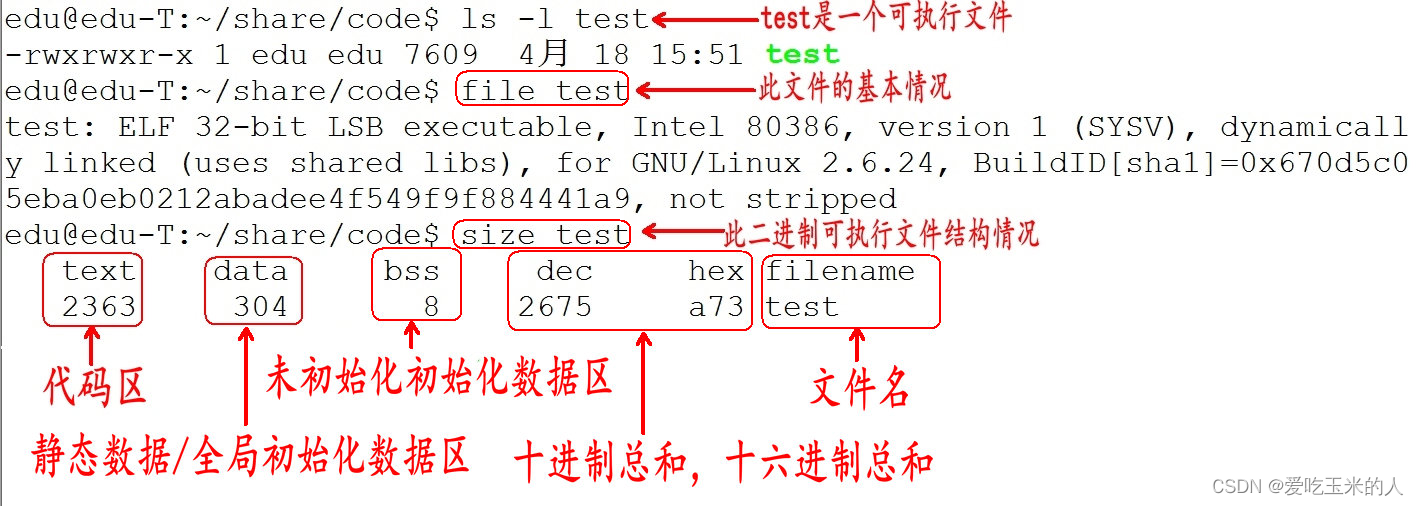
通过上图可以得知,在没有运行程序前,也就是说程序没有加载到内存前,可执行程序内部已经分好3段信息,分别为代码区(text)、数据区(data)和未初始化数据区(bss)
代码区通常是只读的,共享
全局初始化数据区/静态数据区(data段);全局静态存储区主要存储全局变量、静态变量和常量
未初始化数据区(又叫 bss 区)
代码区和全局区(data和bss)的大小就是固定的
static char arr[] = "hello world!"; //在静态区存储 可读可写
arr[2] = 'c';
char* p = "hello world!"; //全局/静态区-字符串常量区
//p[2] = 'c'; //只读,不可修改
数据区包括:堆,栈,全局/静态存储区。
全局/静态存储区包括:常量区,全局区、静态区。
常量区包括:字符串常量区、常变量区。
代码区:存放程序编译后的二进制代码,不可寻址区。
可以说,C/C++内存分区其实只有两个,即代码区和数据区。
数组
- 元素类型角度:数组是相同类型的变量的有序集合
- 内存角度:连续的一大片内存空间
- 数组名的值是一个指针常量
- 指针和数组不等价
int arr[10];
//arr = NULL; //arr作为指针常量,不可修改
int *p = arr; //此时arr作为指针常量来使用
printf("sizeof(arr):%d\n", sizeof(arr)); //此时sizeof结果为整个数组的长度
printf("&arr type is %s\n", typeid(&arr).name()); //int(*)[10]而不是int*
结构体
注意:定义结构体类型时不要直接给成员赋值,结构体只是一个类型,编译器还没有为其分配空间,只有根据其类型定义变量时,才分配空间,有空间后才能赋值。
指针函数
通过什么来区分两个不同的函数?
一个函数在编译时被分配一个入口地址,这个地址就称为函数的指针,函数名代表函数的入口地址。
函数三要素: 名称、参数、返回值。C语言中的函数有自己特定的类型。
int Func(int x); /*声明一个函数*/
int (*p) (int x); /*定义一个函数指针*/
p = Func; /*将Func函数的首地址赋给指针变量p*/宏定义
在项目中,经常把一些短小而又频繁使用的函数写成宏函数,这是由于宏函数没有普通函数参数压栈、跳转、返回等的开销,可以调高程序的效率。
宏通过使用参数,可以创建外形和作用都与函数类似地类函数宏(function-like macro). 宏的参数也用圆括号括起来。
注意:
- 宏的名字中不能有空格,但是在替换的字符串中可以有空格。ANSI C允许在参数列表中使用空格;
- 用括号括住每一个参数,并括住宏的整体定义。
- 用大写字母表示宏的函数名。
- 如果打算宏代替函数来加快程序运行速度。假如在程序中只使用一次宏对程序的运行时间没有太大。
C++
面向过程编程思想的核心:功能分解,自顶向下,逐层细化(程序=数据结构+算法)
面向对象三大特性
- 封装
类将成员变量和成员函数封装在类的内部,根据需要设置访问权限,通过成员函数管理内部状态。
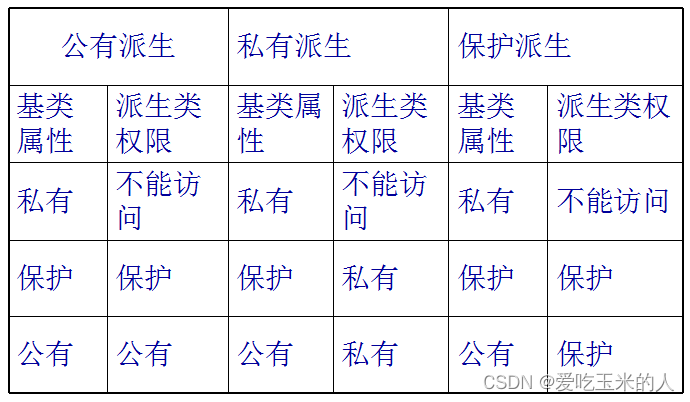
2.继承
继承所表达的是类之间相关的关系,这种关系使得对象可以继承另外一类对象的特征和能力。
继承的作用:避免公用代码的重复开发,减少代码和数据冗余。
3.多态
多态性可以简单地概括为“一个接口,多种方法”,字面意思为多种形态。程序在运行时才决定调用的函数,它是面向对象编程领域的核心概念。
多态还可分为:
动态多态(dynamic polymorphism):通过类继承机制和虚函数机制生效于运行期。可以优雅地处理异质对象集合,只要其共同的基类定义了虚函数的接口。也被称为子类型多态(Subtype polymorphism)或包含多态(inclusion polymorphism)。在面向对象程序设计中,这被直接称为多态。
静态多态(static polymorphism):模板也允许将不同的特殊行为和单个泛化记号相关联,由于这种关联处理于编译期而非运行期,因此被称为“静态”。可以用来实现类型安全、运行高效的同质对象集合操作。C++STL不采用动态多态来实现就是个例子。
全局变量/局部变量的作用域
通常情况下,如果有两个同名变量,一个是全局变量,另一个是局部变量,那么局部变量在其作用域内具有较高的优先权,它将屏蔽全局变量
标准C++引入关键字namespace(命名空间/名字空间/名称空间),可以更好地控制标识符的作用域。
无名命名空间,意味着命名空间中的标识符只能在本文件内访问,相当于给这个标识符加上了static,使得其可以作为内部连接
C/C++中const的区别
常量的引进是在c++早期版本中,当时标准C规范正在制定。那时,尽管C委员会决定在C中引入const,但是,他们c中的const理解为”一个不能改变的普通变量”,也就是认为const应该是一个只读变量,既然是变量那么就会给const分配内存,并且在c中const是一个全局只读变量,c语言中const修饰的只读变量是外部连接的。
const int arrSize = 10;
int arr[arrSize];
看似是一件合理的编码,但是这将得出一个错误。 因为arrSize占用某块内存,所以C编译器不知道它在编译时的值是多少?
C/C++中const异同总结
- c语言全局const会被存储到只读数据段。c++中全局const当声明extern或者对变量取地址时,编译器会分配存储地址,变量存储在只读数据段。两个都受到了只读数据段的保护,不可修改
- c语言中局部const存储在堆栈区,只是不能通过变量直接修改const只读变量的值,但是可以跳过编译器的检查,通过指针间接修改const值。
- c中const默认为外部连接,c++中const默认为内部连接.当c语言两个文件中都有const int a的时候,编译器会报重定义的错误。而在c++中,则不会,因为c++中的const默认是内部连接的。如果想让c++中的const具有外部连接,必须显示声明为: extern const int a = 10;
namespace
namespace是指标识符的各种可见范围。命名空间用关键字namespace 来定义。命名空间是C++的一种机制,用来把单个标识符下的大量有逻辑联系的程序实体组合到一起。此标识符作为此组群的名字。
尽量以const替换#define
我们定义的宏MAX从未被编译器看到过,因为在预处理阶段,所有的MAX已经被替换为了1024
内联函数
内联函数的确占用空间,但是内联函数相对于普通函数的优势只是省去了函数调用时候的压栈,跳转,返回的开销。我们可以理解为内联函数是以空间换时间。的确占用空间,但是内联函数相对于普通函数的优势只是省去了函数调用时候的压栈,跳转,返回的开销。我们可以理解为内联函数是以空间换时间。
struct和class的区别?
class默认访问权限为private,struct默认访问权限为public.
explicit注意
- explicit用于修饰构造函数,防止隐式转化。
- 是针对单参数的构造函数(或者除了第一个参数外其余参数都有默认值的多参构造)而言。
静态成员
- 静态成员变量必须在类中声明,在类外定义。
- 静态数据成员不属于某个对象,在为对象分配空间中不包括静态成员所占空间。
- 静态数据成员可以通过类名或者对象名来引用。
静态成员函数
- 静态成员函数只能访问静态变量,不能访问普通成员变量
- 静态成员函数的使用和静态成员变量一样
- 静态成员函数也有访问权限
- 普通成员函数可访问静态成员变量、也可以访问非静态成员变量,,
静态成员函数和非静态成员函数的共同点:
- 他们都可以被继承到派生类中。
- 如果重新定义一个静态成员函数,所有在基类中的其他重载函数会被隐藏。
- 如果我们改变基类中一个函数的特征,所有使用该函数名的基类版本都会被隐藏。
const修饰对象(常对象)
- 常对象只能调用const的成员函数
- 常对象可访问 const 或非 const 数据成员,不能修改,除非成员用mutable修饰
友元语法
- friend关键字只出现在声明处
- 其他类、类成员函数、全局函数都可声明为友元
- 友元函数不是类的成员,不带this指针
- 友元函数可访问对象任意成员属性,包括私有属性
符号重载总结
- =, [], () 和 -> 操作符只能通过成员函数进行重载
- << 和 >>只能通过全局函数配合友元函数进行重载
- 不要重载 && 和 || 操作符,因为无法实现短路规则
重写 重载 重定义
- 重载,同一作用域的同名函数
- 同一个作用域
- 参数个数,参数顺序,参数类型不同
- 和函数返回值,没有关系
- const也可以作为重载条件 //do(const Teacher& t){} do(Teacher& t)
- 重定义(隐藏)
- 有继承
- 子类(派生类)重新定义父类(基类)的同名成员(非virtual函数)
- 重写(覆盖)
- 有继承
- 子类(派生类)重写父类(基类)的virtual函数
- 函数返回值,函数名字,函数参数,必须和基类中的虚函数一致
虚函数
1、纯虚函数声明如下: virtual void funtion1()=0; 纯虚函数一定没有定义,纯虚函数用来规范派生类的行为,即接口。包含纯虚函数的类是抽象类,抽象类不能定义实例,但可以声明指向实现该抽象类的具体类的指针或引用。
2、虚函数声明如下:virtual ReturnType FunctionName(Parameter) 虚函数必须实现,如果不实现,编译器将报错,错误提示为:
error LNK****: unresolved external symbol "public: virtual void __thiscall ClassName::virtualFunctionName(void)"
3、对于虚函数来说,父类和子类都有各自的版本。由多态方式调用的时候动态绑定。
4、实现了纯虚函数的子类,该纯虚函数在子类中就编程了虚函数,子类的子类即孙子类可以覆盖该虚函数,由多态方式调用的时候动态绑定。
5、虚函数是C++中用于实现多态(polymorphism)的机制。核心理念就是通过基类访问派生类定义的函数。
6、在有动态分配堆上内存的时候,析构函数必须是虚函数,但没有必要是纯虚的。
7、友元不是成员函数,只有成员函数才可以 是虚拟的,因此友元不能是虚拟函数。但可以通过让友元函数调用虚拟成员函数来解决友元的虚拟问题。
8、析构函数应当是虚函数,将调用相应对象类型的析构函数,因此,如果指针指向的是子类对象,将调用子类的析构函数,然后自动调用基类的析构函数。
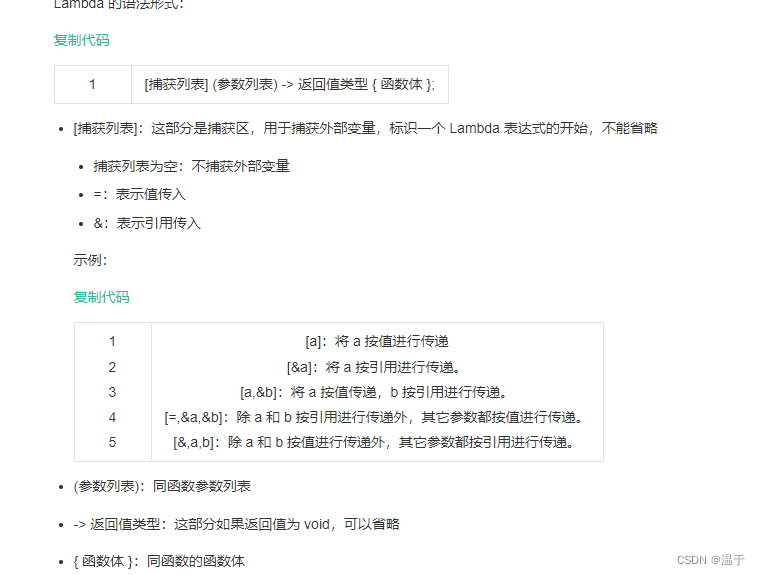
C++11 中 Lambda 新特性
Lambda 表达式用于定义并创建匿名的函数对象,用来简化编程工作
Lambda 的语法形式:
堆栈空间分配区别:
1、栈(操作系统):由操作系统自动分配释放 ,存放函数的参数值,局部变量的值等。其操作方式类似于数据结构中的栈;
2、堆(操作系统): 一般由程序员分配释放, 若程序员不释放,程序结束时可能由os回收,分配方式倒是类似于链表。
二、堆栈缓存方式区别: 1、栈使用的是一级缓存, 他们通常都是被调用时处于存储空间中,调用完毕立即释放; 2、堆是存放在二级缓存中,生命周期由虚拟机的垃圾回收算法来决定(并不是一旦成为孤儿对象就能被回收)。所以调用这些对象的速度要相对来得低一些。
三、堆栈数据结构区别: 堆(数据结构):堆可以被看成是一棵树,如:堆排序; 栈(数据结构):一种先进后出的数据结构。
操作系统
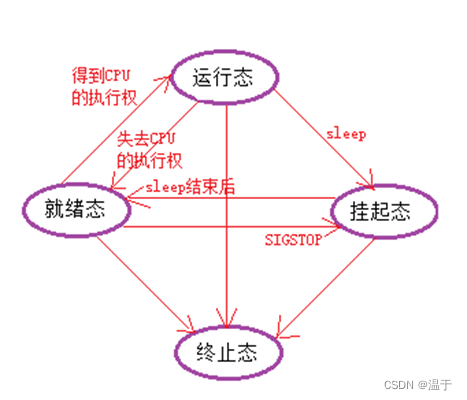
进程状态(面试考)
- 进程基本的状态有5种。分别为初始态,就绪态,运行态,挂起态与终止态。其中初始态为进程准备阶段,常与就绪态结合来看。
孤儿进程
编写模拟孤儿进程的代码讲解孤儿进程,验证孤儿进程的父进程是否由原来的父进程变成了init进程。
- 孤儿进程的概念:
若子进程的父进程已经死掉,而子进程还存活着,这个进程就成了孤儿进程。
- 为了保证每个进程都有一个父进程,孤儿进程会被init进程领养,init进程成为了孤儿进程的养父进程,当孤儿进程退出之后,由init进程完成对孤儿进程的回收。
- 模拟孤儿进程的案例
僵尸进程
- 僵尸进程的概念:
若子进程死了,父进程还活着, 但是父进程没有调用wait或waitpid函数完成对子进程的回收,则该子进程就成了僵尸进程。
- 如何解决僵尸进程
- 由于僵尸进程是一个已经死亡的进程,所以不能使用kill命令将其杀死
- 通过杀死其父进程的方法可以消除僵尸进程。
杀死其父进程后,这个僵尸进程会被init进程领养,由init进程完成对僵尸进程的回收。
守护进程
Daemon(精灵)进程,是Linux中的后台服务进程,通常独立于控制终端并且周期性地执行某种任务或等待处理某些发生的事件。一般采用以d结尾的名字,如vsftpd
Linux后台的一些系统服务进程,没有控制终端,不能直接和用户交互。不受用户登录、注销的影响,一直在运行着,他们都是守护进程。如:预读入缓输出机制的实现;ftp服务器;nfs服务器等。
- 总结守护进程的特点:
- Linux后台服务进程
- 独立于控制终端
- 周期性的执行某种任务
- 不受用户登陆和注销的影响
- 一般采用以d结尾的名字
第1步:fork子进程,父进程退出
第2步:子进程调用setsid函数创建新会话
第3步:改变当前工作目录chdir
第4步:重设文件掩码 mode & ~umask
第5步:关闭文件描述符
第6步:执行核心工作
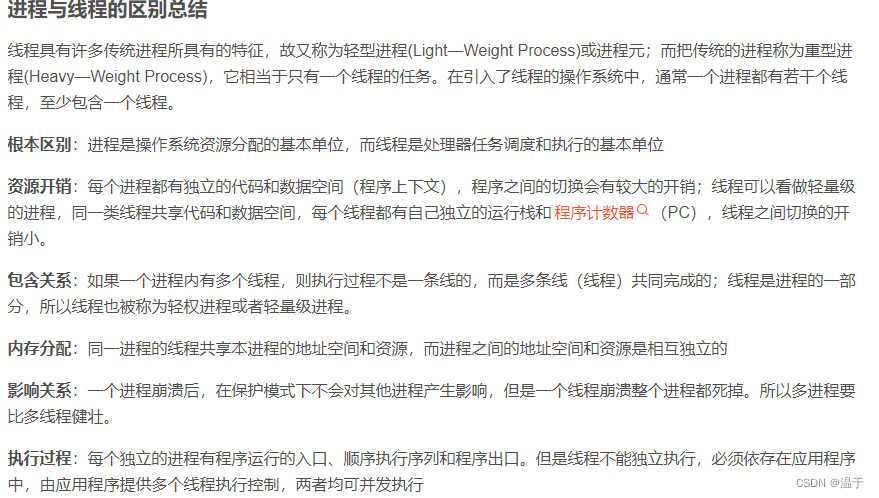
线程与进程之间区别
现今常用的进程间通信方式有:
- 管道 (使用最简单)
- 信号 (开销最小)
- 共享映射区 (无血缘关系)
- 本地套接字 (最稳定)
- 共享内存
匿名管道
管道是一种最基本的IPC机制,也称匿名管道,应用于有血缘关系的进程之间,完成数据传递。调用pipe函数即可创建一个管道。(亲缘关系)
管道的本质是一块内核缓冲区
由两个文件描述符引用,一个表示读端,一个表示写端。
规定数据从管道的写端流入管道,从读端流出。
当两个进程都终结的时候,管道也自动消失。
管道的读端和写端默认都是阻塞的。
管道的原理
管道的实质是内核缓冲区,内部使用环形队列实现。
默认缓冲区大小为4K,可以使用ulimit -a命令获取大小。
实际操作过程中缓冲区会根据数据压力做适当调整。
管道的局限性
数据一旦被读走,便不在管道中存在,不可反复读取。
数据只能在一个方向上流动,若要实现双向流动,必须使用两个管道
只能在有血缘关系的进程间使用管道。
命名管道
FIFO常被称为命名管道,以区分管道(pipe)。管道(pipe)只能用于“有血缘关系”的进程间通信。但通过FIFO,不相关的进程也能交换数据。
FIFO是Linux基础文件类型中的一种(文件类型为p,可通过ls -l查看文件类型)。但FIFO文件在磁盘上没有数据块,文件大小为0,仅仅用来标识内核中一条通道。进程可以打开这个文件进行read/write,实际上是在读写内核缓冲区,这样就实现了进程间通信。
内存映射区
存储映射I/O (Memory-mapped I/O) 使一个磁盘文件与存储空间中的一个缓冲区相映射。从缓冲区中取数据,就相当于读文件中的相应字节;将数据写入缓冲区,则会将数据写入文件。这样,就可在不使用read和write函数的情况下,使用地址(指针)完成I/O操作。
线程同步
数据混乱的原因:
- 资源共享(独享资源则不会)
- 调度随机(线程操作共享资源的先后顺序不确定)
- 线程间缺乏必要的同步机制。
死锁
- 第一种:自己锁自己,如下图代码片段
- 第二种:线程A拥有A锁,请求获得B锁;线程B拥有B锁,请求获得A锁,这样造成线程A和线程B都不释放自己的锁,而且还想得到对方的锁,从而产生死锁,如下图所示:
形成死锁的四个必要条件是什么?
- 互斥条件:在一段时间内,某个资源只由一个进程占用。如果此时其他进程请求资源,就只能等待,直到占有资源的进程释放。
- 占有且等待条件:进程至少保持一个资源,但又提出了新的资源的请求,而请求的资源被其他进程占有,此时请求进程阻塞,对自己已经获取的资源保持不放。
- 不可抢占条件:别人已经占有了某项资源,你不能因为自己也需要该资源,就去把别人的资源抢过来。
- 循环等待条件:若干进程之间形成一种头尾相接的循环等待资源关系。(比如一个进程集合,A在等B,B在等C,C在等A)
如何避免死锁?
- 避免一个线程同时获得多个锁
- 避免一个线程在锁内同时占有多个资源,尽量保证每个锁只占有一个资源
- 尝试使用定时锁,使用
lock.tryLock(timeout)来替代使用内部锁机制
互斥锁
注意:必须在所有操作共享资源的线程上都加上锁否则不能起到同步的效果。
读写锁
- 读写锁也叫共享-独占锁。当读写锁以读模式锁住时,它是以共享模式锁住的;当它以写模式锁住时,它是以独占模式锁住的。写独占、读共享。
条件变量
- 条件本身不是锁!但它也可以造成线程阻塞。通常与互斥锁配合使用。给多线程提供一个会合的场所。
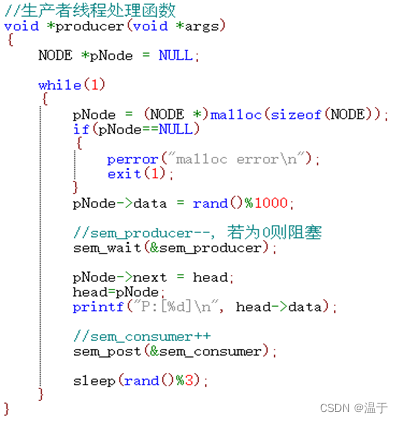
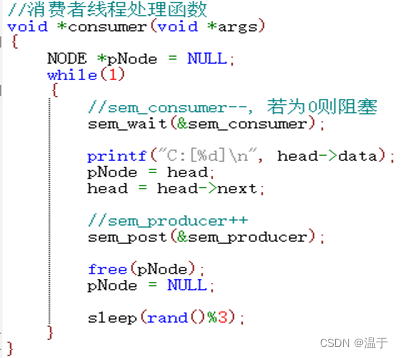
信号量
信号量相当于多把锁, 可以理解为是加强版的互斥锁
信号
STL
STL六大组件
容器、算法、迭代器、仿函数、适配器、空间配置器
STL优点
- 内建在C++编译器中,不需要安装额外内容
- 高复用,可移植,高性能
- 不需要了解具体实现内容,只要熟练运用即可
容器划分
- 序列式容器
- 关联式容器 有个key起到索引作用
算法
- 质变算法
- 非质变算法
vector动态数组,自动扩展内存,所谓动态扩展内存,并不是在原有空间后续进行扩展,而是找一个更大的内存空间,将原有数据拷贝到新空间下,并且释放原有空间
算法与结构
priority_queue的>号,返回真,则最小第一个;
数据结构是计算机存储、组织数据的方式。是相互之间存在一种或多种特定关系的数据元素集合
算法具有五个基本的特性:输入、输出、有穷性、确定性和可行性
斐波那契数列
void test(char nihao[64]);
sizeof(nihao)=4;
交换
arr[i] = arr[i] ^ arr[j];
arr[j] = arr[i] ^ arr[j];
arr[i] = arr[i] ^ arr[j];
temp=temp>>1;等价于temp=temp/2;
时间复杂度O(N^2),额外空间复杂度O(1)
选择排序、冒泡排序、插入排序(最差)
二分法
while(lo<hi)
{
if (calcSum(mid, n, index) <= maxSum) {
lo = mid + 1;
}
else {
hi = mid;
}
}
return lo - 1;
}
------------------
[算法总结] 十大排序算法 - 知乎 (zhihu.com)
归并排序
1)整体就是一个简单递归,左边排好序、右边排好序、让其整体有序
2)让其整体有序的过程里用了排外序方法
3)利用master公式来求解时间复杂度
4)归并排序的实质
时间复杂度O(N*logN),额外空间复杂度O(N)
堆排序
1,先让整个数组都变成大根堆结构,建立堆的过程:
1)从上到下的方法,时间复杂度为O(N*logN)
2)从下到上的方法,时间复杂度为O(N)
2,把堆的最大值和堆末尾的值交换,然后减少堆的大小之后,再去调
整堆,一直周而复始,时间复杂度为O(N*logN)
3,堆的大小减小成0之后,排序完成
额外空间复杂度哦O(1),O(N);
快排序
左侧<划分值、中间==划分值、右侧>划分值
2)对左侧范围和右侧范围,递归执行
3)时间复杂度为O(N*logN)
最优的情况下空间复杂度为:O(logn) ;每一次都平分数组的情况
最差的情况下空间复杂度为:O( n ) ;退化为冒泡排序的情况
桶排序思想下的排序
1)计数排序
2)基数排序
分析:
1)桶排序思想下的排序都是不基于比较的排序
2)时间复杂度为O(N),额外空间负载度O(M)
3)应用范围有限,需要样本的数据状况满足桶的划分
排序算法的稳定性及其汇总
同样值的个体之间,如果不因为排序而改变相对次序,就是这个排序是有稳定
性的;否则就没有。
不具备稳定性的排序:
选择排序、快速排序、堆排序
具备稳定性的排序:
冒泡排序、插入排序、归并排序、一切桶排序思想下的排序
目前没有找到时间复杂度O(N*logN),额外空间复杂度O(1),又稳定的排序
排序总结
排序方法 平均情况 最好情况 最坏情况 辅助空间 稳定性
冒泡排序 O(n^2) O(n) O(n^2) O(1) 稳定
简单选择排序 O(n^2) O(n^2) O(n^2) O(1) 不稳定
直接插入排序 O(n^2) O(n) O(n^2) O(1) 稳定
希尔排序 O(nlogn)~O(n^2) O(n^1.3) O(n^2) O(1) 不稳定
堆排序 O(nlogn) O(nlogn) O(nlogn) O(1) 不稳定
归并排序 O(nlogn) O(nlogn) O(nlogn) O(n) 稳定
快速排序 O(nlogn) O(nlogn) O(n^2) O(logn)~O(n) 不稳定
桶 O(N) O(M) 稳定
二叉树:
先序遍历:中左右
中序遍历:左中右
后序遍历:右中左
非梯归实现
先序遍历:先入栈,条件栈底为空退出,弹出为头打印,右子树入栈,左子树入栈
中序遍历:先入栈,条件为(栈底为空 | | head 为NULL),if(head=NULL)左子树入栈 continue,else 弹出打印head=head.right
后序遍历: 先入栈,条件栈底为空退出,弹出为头打印,左子树入栈,右子树入栈
二叉树宽队遍历用queue;
完全二叉树判定:
如果该节点左孩子为空,右孩子不为空,则一定不是完全二叉树
3如果该节点左孩子不为空,右孩子为空或者该节点为叶子节点,则该节点之后的所有结点都是叶子节点
sql
175. 组合两个表
1)左联结(left join),联结结果保留左表的全部数据
2)右联结(right join),联结结果保留右表的全部数据
3)内联结(inner join),取两表的公共数据
Select语句的整体形式:
select col1, col2…
from table_name
where condition
group by col…
having condtion
order by col…
MySQL 使用 DATEDIFF 来比较两个日期类型的值。leetcode 197
网络
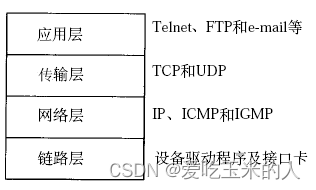
层数
- 物理层:主要定义物理设备标准,如网线的接口类型、光纤的接口类型、各种传输介质的传输速率等。它的主要作用是传输比特流(就是由1、0转化为电流强弱来进行传输,到达目的地后再转化为1、0,也就是我们常说的数模转换与模数转换)。这一层的数据叫做比特。
- 数据链路层:定义了如何让格式化数据以帧为单位进行传输,以及如何让控制对物理介质的访问。这一层通常还提供错误检测和纠正,以确保数据的可靠传输。如:串口通信中使用到的115200、8、N、1
- 网络层:在位于不同地理位置的网络中的两个主机系统之间提供连接和路径选择。Internet的发展使得从世界各站点访问信息的用户数大大增加,而网络层正是管理这种连接的层。
- 传输层:定义了一些传输数据的协议和端口号(WWW端口80等),如:TCP(传输控制协议,传输效率低,可靠性强,用于传输可靠性要求高,数据量大的数据),UDP(用户数据报协议,与TCP特性恰恰相反,用于传输可靠性要求不高,数据量小的数据,如QQ聊天数据就是通过这种方式传输的)。 主要是将从下层接收的数据进行分段和传输,到达目的地址后再进行重组。常常把这一层数据叫做段。
- 会话层:通过传输层(端口号:传输端口与接收端口)建立数据传输的通路。主要在你的系统之间发起会话或者接受会话请求(设备之间需要互相认识可以是IP也可以是MAC或者是主机名)。
- 表示层:可确保一个系统的应用层所发送的信息可以被另一个系统的应用层读取。例如,PC程序与另一台计算机进行通信,其中一台计算机使用扩展二一十进制交换码(EBCDIC),而另一台则使用美国信息交换标准码(ASCII)来表示相同的字符。如有必要,表示层会通过使用一种通格式来实现多种数据格式之间的转换。
- 应用层:是最靠近用户的OSI层。这一层为用户的应用程序(例如电子邮件、文件传输和终端仿真)提供网络服务。
TCP
主动关闭的Socket端会进入TIME_WAIT状态,并且持续2MSL时间长度,MSL就是maximum segment lifetime(最大分节生命期),这是一个IP数据包能在互联网上生存的最长时间,超过这个时间将在网络中消失。
TCP:传输控制协议, 面向连接的,稳定的,可靠的,安全的数据流传递
稳定和可靠: 丢包重传
数据有序: 序号和确认序号
流量控制: 滑动窗口
三次握手和四次挥手
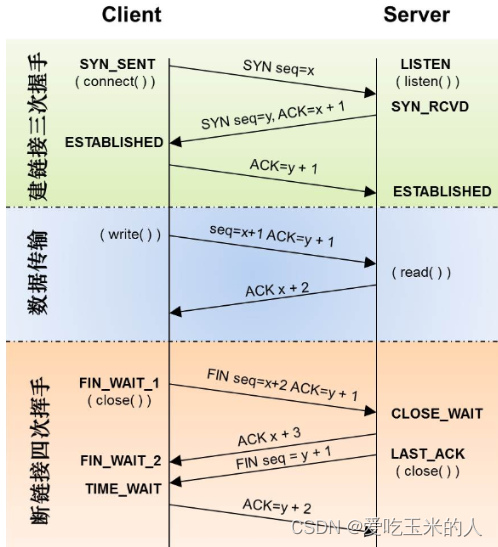
三次握手:TCP 提供面向有连接的通信传输。面向有连接是指在数据通信开始之前先做好两端之间的准备工作。所谓三次握手是指建立一个 TCP 连接时需要客户端和服务器端总共发送三个包以确认连接的建立。
第一次握手:客户端将标志位SYN置为1,随机产生一个值初始序列号seq=J,并将该数据包发送给服务器端,客户端进入SYN_SENT状态,等待服务器端确认。
第二次握手:服务器端收到数据包后由标志位SYN=1知道客户端请求建立连接,服务器端将标志位SYN和确认字符ACK都置为1,确认号ack=J+1,随机产生一个值seq=K,并将该数据包发送给客户端以确认连接请求,服务器端进入SYN_RCVD状态。
第三次握手:客户端收到确认后,检查ack是否为J+1,ACK是否为1,如果正确则将标志位ACK置为1,ack=K+1,并将该数据包发送给服务器端,服务器端检查ack是否为K+1,ACK是否为1,如果正确则连接建立成功,客户端和服务器端进入ESTABLISHED状态,完成三次握手,随后客户端与服务器端之间可以开始传输数据了。
第一次握手:Client 什么都不能确认;Server 确认了对方发送正常
第二次握手:Client 确认了:自己发送、接收正常,对方发送、接收正常;Server 确认了:自己接收正常,对方发送正常
第三次握手:Client 确认了:自己发送、接收正常,对方发送、接收正常;Server 确认了:自己发送、接收正常,对方发送接收正常
四次挥手:四次挥手即终止TCP连接,就是指断开一个TCP连接时,需要客户端和服务端总共发送4个包以确认连接的断开。
第一次挥手:客户端发送一个FIN=M,用来关闭客户端到服务器端的数据传送,客户端进入FIN_WAIT_1状态。意思是说"我客户端没有数据要发给你了",但是如果你服务器端还有数据没有发送完成,则不必急着关闭连接,可以继续发送数据。
第二次挥手:服务器端收到FIN后,先发送ack=M+1,告诉客户端,你的请求我收到了,但是我还没准备好,请继续你等我的消息。这个时候客户端就进入FIN_WAIT_2 状态,继续等待服务器端的FIN报文。
第三次挥手:当服务器端确定数据已发送完成,则向客户端发送FIN=N报文,告诉客户端,好了,我这边数据发完了,准备好关闭连接了。服务器端进入LAST_ACK状态。
第四次挥手:客户端收到FIN=N报文后,就知道可以关闭连接了,但是他还是不相信网络,怕服务器端不知道要关闭,所以发送ack=N+1后进入TIME_WAIT状态,如果Server端没有收到ACK则可以重传。服务器端收到ACK后,就知道可以断开连接了。客户端等待了2MSL后依然没有收到回复,则证明服务器端已正常关闭,那好,我客户端也可以关闭连接了。最终完成了四次握手。
客户端-发送一个 FIN,用来关闭客户端到服务器的数据传送
服务器-收到这个 FIN,它发回一 个 ACK,确认序号为收到的序号加1 。和 SYN 一样,一个 FIN 将占用一个序号
服务器-关闭与客户端的连接,发送一个FIN给客户端
客户端-发回 ACK 报文确认,并将确认序号设置为收到序号加1
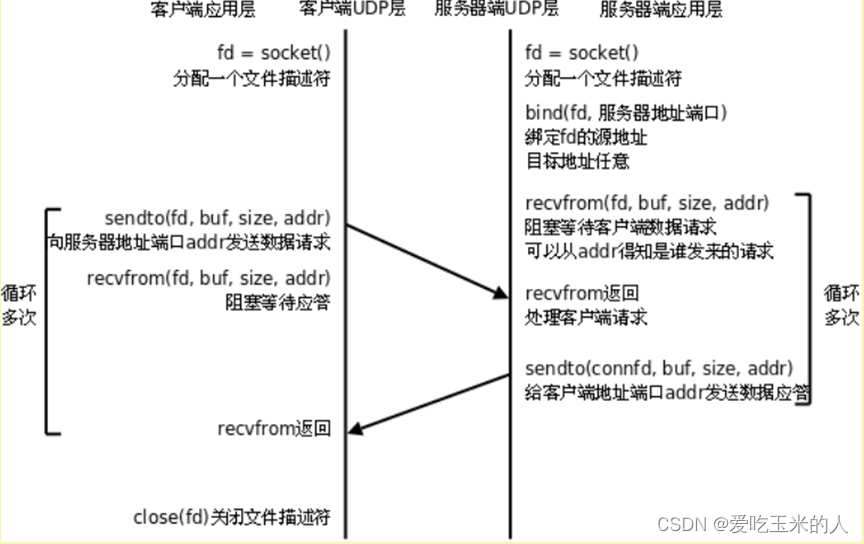
UDP:用户数据报协议
面向无连接的,不稳定,不可靠,不安全的数据报传递---更像是收发短信
UDP传输不需要建立连接,传输效率更高,在稳定的局域网内环境相对可靠
select
select优点:
1 一个进程可以支持多个客户端
2 select支持跨平台
select缺点:
1 代码编写困难
2 会涉及到用户区到内核区的来回拷贝
3 当客户端多个连接, 但少数活跃的情况, select效率较低
例如: 作为极端的一种情况, 1024文件描述符全部打开, 但是只有1有发送数据, select就显得效率低下
4 最大支持1024个客户端连接
select最大支持1024个客户端连接不是有文件描述符表最多可以支持1024个文件描述符限制的, 而是由FD_SETSIZE=1024限制的。FD_SETSIZE=1024 fd_set使用了该宏, 当然可以修改内核, 然后再重新编译内核, 一般不建议这么做.
poll
上述缺点都有
相较于select而言,poll的优势:
1. 传入、传出事件分离。无需每次调用时,重新设定监听事件。
2. 文件描述符上限,可突破1024限制(原因是用链表存储)。能监控的最大上限数可使用配置文件调整。
epoll
epoll是Linux下多路复用IO接口select/poll的增强版本,它能显著提高程序在大量并发连接中只有少量活跃的情况下的系统CPU利用率,因为它会复用文件描述符集合来传递结果而不用迫使开发者每次等待事件之前都必须重新准备要被侦听的文件描述符集合,另一点原因就是获取事件的时候,它无须遍历整个被侦听的描述符集,只要遍历那些被内核IO事件异步唤醒而加入Ready队列的描述符集合就行了。
epoll的两种模式ET和LT模式
水平触发: 高电平代表1
只要缓冲区中有数据, 就一直通知
边缘触发: 电平有变化就代表1
缓冲区中有数据只会通知一次, 之后再有数据才会通知.(若是读数据的时候没有读完, 则剩余的数据不会再通知, 直到有新的数据到来)
边缘非阻塞模式: 提高效率
用实验验证LT和ET模式
ET模式由于只通知一次, 所以在读的时候要循环读, 直到读完, 但是当读完之后read就会阻塞, 所以应该将该文件描述符设置为非阻塞模式(fcntl函数).
read函数在非阻塞模式下读的时候, 若返回-1, 且errno为EAGAIN, 则表示当前资源不可用, 也就是说缓冲区无数据(缓冲区的数据已经读完了); 或者当read返回的读到的数据长度小于请求的数据长度时,就可以确定此时缓冲区中已没有数据可读了,也就可以认为此时读事件已处理完成。
libevent介绍
1 事件驱动, 高性能, 轻量级, 专注于网络
2 源代码精炼, 易读
3 跨平台
4 支持多种I/O多路复用技术, 如epoll select poll等
5 支持I/O和信号等事件