秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】——点击即可跳转
💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡
专栏目录 :《YOLOv8改进有效涨点》专栏介绍 & 专栏目录 | 目前已有80+篇内容,内含各种Head检测头、损失函数Loss、Backbone、Neck、NMS等创新点改进——点击即可跳转
目前虽然复杂网络的性能很好,但它们日益增加的复杂性给部署带来了挑战。例如,ResNets中的shortcut操作在合并不同层的特征时耗费了大量的off-chip memory traffic。再比如AS-MLP中的axial shift操作以及Swin Transformer中的shift window self-attention操作都需要复杂的工程实现,包括重写CUDA代码。本文介绍的VanillaNet,一种新的神经网络架构,有着简单而优雅的设计,同时在视觉任务中保持了显著的性能。VanillaNet通过舍弃过多的深度、shortcut以及self-attention等复杂的操作,解决了复杂度的问题,非常适合资源有限的环境。文章在介绍主要的原理后,将手把手教学如何进行模块的代码添加和修改,并将修改后的完整代码放在文章的最后,方便大家一键运行,小白也可轻松上手实践。以帮助您更好地学习深度学习目标检测YOLO系列的挑战。
专栏地址:YOLOv8改进——更新各种有效涨点方法——点击即可跳转 订阅专栏学习不迷路
目录
1. 原理

论文地址:VanillaNet: the Power of Minimalism in Deep Learning——点击即可跳转
官方代码: 官方代码仓库——点击即可跳转
VanillaNet:主要原则
VanillaNet 是一种神经网络架构,其设计非常注重简单性和极简主义。以下是对其核心原则和设计理念的详细解释,不包括实验细节:
动机和理念
简单胜过复杂:传统的深度学习模型变得越来越复杂,具有复杂的操作层和深度架构。VanillaNet 旨在通过避免过度深度、捷径和自我注意等复杂操作来简化这一点。
极简主义设计:该架构采用极简主义,专注于紧凑而直接的层,使其更适合在资源受限的环境中部署。
主要架构特征
层结构:VanillaNet 由非常有限数量的卷积层组成。例如,VanillaNet-6 只有六个卷积层。
阶段设计:网络分为多个阶段,其中输入特征的大小被下采样,通道数量加倍。这种设计灵感来自 AlexNet 和 VGGNet 等经典神经网络。
无捷径:与 ResNet 等架构不同,VanillaNet 不使用捷径连接,从而简化了设计并减少了内存消耗。
非线性激活函数:最初,VanillaNet 层包括非线性激活函数,这些函数在训练后会被修剪以返回到更简单的线性形式。
训练技术
深度训练策略:VanillaNet 采用独特的训练策略,从包含激活函数的更深层开始,随着训练的进行,这些激活函数逐渐减少为恒等映射。这使得卷积层更容易合并并保持推理速度。
基于序列的激活函数:为了增强非线性,VanillaNet 使用基于序列的激活函数,该函数结合了多个可学习的仿射变换。这种方法显著提高了网络的非线性能力,而不会增加复杂性。
性能和效率
紧凑高效:尽管 VanillaNet 采用了极简主义方法,但其性能却可与 ResNet 和 Vision Transformers (ViT) 等更复杂的网络相媲美。它证明了简单也可以很强大,为神经网络设计提供了新的视角。
资源优化:精简的架构使 VanillaNet 特别适合计算资源有限的环境,例如移动设备和嵌入式系统。
架构细节
主干块:初始层使用具有步幅的卷积层将输入图像通道(例如 RGB)转换为更多通道。
池化层:最大池化层用于对特征图进行下采样,同时在各个阶段增加通道数量。
最终层:网络以平均池化层结束,然后是用于分类任务的完全连接层。
总结
VanillaNet 重新思考了深度学习模型的设计,将架构精简为基本组件,同时仍能实现高性能。它强调极简主义,结合创新的训练技术,展示了深度学习中更简单但有效的模型的潜力。
2. 将VanillaNet添加到yolov8网络中
2.1 VanillaNet代码实现
关键步骤一: 将下面代码粘贴到在/ultralytics/ultralytics/nn/modules/block.py中,并在该文件的__all__中添加“vanillanet_5,vanillanet_6, vanillanet_7, vanillanet_8, vanillanet_9,vanillanet_10, vanillanet_11,vanillanet_12, vanillanet_13, vanillanet_13_x1_5,vanillanet_13_x1_5_ada_pool,”
#Copyright (C) 2023. Huawei Technologies Co., Ltd. All rights reserved.
#This program is free software; you can redistribute it and/or modify it under the terms of the MIT License.
#This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the MIT License for more details.
import torch
import torch.nn as nn
import torch.nn.functional as F
from timm.models.layers import weight_init, DropPath
import numpy as np
__all__ = ['vanillanet_5', 'vanillanet_6', 'vanillanet_7', 'vanillanet_8', 'vanillanet_9', 'vanillanet_10', 'vanillanet_11', 'vanillanet_12', 'vanillanet_13', 'vanillanet_13_x1_5', 'vanillanet_13_x1_5_ada_pool']
class activation(nn.ReLU):
def __init__(self, dim, act_num=3, deploy=False):
super(activation, self).__init__()
self.deploy = deploy
self.weight = torch.nn.Parameter(torch.randn(dim, 1, act_num*2 + 1, act_num*2 + 1))
self.bias = None
self.bn = nn.BatchNorm2d(dim, eps=1e-6)
self.dim = dim
self.act_num = act_num
weight_init.trunc_normal_(self.weight, std=.02)
def forward(self, x):
if self.deploy:
return torch.nn.functional.conv2d(
super(activation, self).forward(x),
self.weight, self.bias, padding=(self.act_num*2 + 1)//2, groups=self.dim)
else:
return self.bn(torch.nn.functional.conv2d(
super(activation, self).forward(x),
self.weight, padding=self.act_num, groups=self.dim))
def _fuse_bn_tensor(self, weight, bn):
kernel = weight
running_mean = bn.running_mean
running_var = bn.running_var
gamma = bn.weight
beta = bn.bias
eps = bn.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta + (0 - running_mean) * gamma / std
def switch_to_deploy(self):
if not self.deploy:
kernel, bias = self._fuse_bn_tensor(self.weight, self.bn)
self.weight.data = kernel
self.bias = torch.nn.Parameter(torch.zeros(self.dim))
self.bias.data = bias
self.__delattr__('bn')
self.deploy = True
class VanillaBlock(nn.Module):
def __init__(self, dim, dim_out, act_num=3, stride=2, deploy=False, ada_pool=None):
super().__init__()
self.act_learn = 1
self.deploy = deploy
if self.deploy:
self.conv = nn.Conv2d(dim, dim_out, kernel_size=1)
else:
self.conv1 = nn.Sequential(
nn.Conv2d(dim, dim, kernel_size=1),
nn.BatchNorm2d(dim, eps=1e-6),
)
self.conv2 = nn.Sequential(
nn.Conv2d(dim, dim_out, kernel_size=1),
nn.BatchNorm2d(dim_out, eps=1e-6)
)
if not ada_pool:
self.pool = nn.Identity() if stride == 1 else nn.MaxPool2d(stride)
else:
self.pool = nn.Identity() if stride == 1 else nn.AdaptiveMaxPool2d((ada_pool, ada_pool))
self.act = activation(dim_out, act_num)
def forward(self, x):
if self.deploy:
x = self.conv(x)
else:
x = self.conv1(x)
x = torch.nn.functional.leaky_relu(x,self.act_learn)
x = self.conv2(x)
x = self.pool(x)
x = self.act(x)
return x
def _fuse_bn_tensor(self, conv, bn):
kernel = conv.weight
bias = conv.bias
running_mean = bn.running_mean
running_var = bn.running_var
gamma = bn.weight
beta = bn.bias
eps = bn.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta + (bias - running_mean) * gamma / std
def switch_to_deploy(self):
if not self.deploy:
kernel, bias = self._fuse_bn_tensor(self.conv1[0], self.conv1[1])
self.conv1[0].weight.data = kernel
self.conv1[0].bias.data = bias
# kernel, bias = self.conv2[0].weight.data, self.conv2[0].bias.data
kernel, bias = self._fuse_bn_tensor(self.conv2[0], self.conv2[1])
self.conv = self.conv2[0]
self.conv.weight.data = torch.matmul(kernel.transpose(1,3), self.conv1[0].weight.data.squeeze(3).squeeze(2)).transpose(1,3)
self.conv.bias.data = bias + (self.conv1[0].bias.data.view(1,-1,1,1)*kernel).sum(3).sum(2).sum(1)
self.__delattr__('conv1')
self.__delattr__('conv2')
self.act.switch_to_deploy()
self.deploy = True
class VanillaNet(nn.Module):
def __init__(self, in_chans=3, num_classes=1000, dims=[96, 192, 384, 768],
drop_rate=0, act_num=3, strides=[2,2,2,1], deploy=False, ada_pool=None, **kwargs):
super().__init__()
self.deploy = deploy
if self.deploy:
self.stem = nn.Sequential(
nn.Conv2d(in_chans, dims[0], kernel_size=4, stride=4),
activation(dims[0], act_num)
)
else:
self.stem1 = nn.Sequential(
nn.Conv2d(in_chans, dims[0], kernel_size=4, stride=4),
nn.BatchNorm2d(dims[0], eps=1e-6),
)
self.stem2 = nn.Sequential(
nn.Conv2d(dims[0], dims[0], kernel_size=1, stride=1),
nn.BatchNorm2d(dims[0], eps=1e-6),
activation(dims[0], act_num)
)
self.act_learn = 1
self.stages = nn.ModuleList()
for i in range(len(strides)):
if not ada_pool:
stage = VanillaBlock(dim=dims[i], dim_out=dims[i+1], act_num=act_num, stride=strides[i], deploy=deploy)
else:
stage = VanillaBlock(dim=dims[i], dim_out=dims[i+1], act_num=act_num, stride=strides[i], deploy=deploy, ada_pool=ada_pool[i])
self.stages.append(stage)
self.depth = len(strides)
self.apply(self._init_weights)
self.channel = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def _init_weights(self, m):
if isinstance(m, (nn.Conv2d, nn.Linear)):
weight_init.trunc_normal_(m.weight, std=.02)
nn.init.constant_(m.bias, 0)
def change_act(self, m):
for i in range(self.depth):
self.stages[i].act_learn = m
self.act_learn = m
def forward(self, x):
res = []
if self.deploy:
x = self.stem(x)
else:
x = self.stem1(x)
x = torch.nn.functional.leaky_relu(x,self.act_learn)
x = self.stem2(x)
res.append(x)
for i in range(self.depth):
x = self.stages[i](x)
res.append(x)
return res
def _fuse_bn_tensor(self, conv, bn):
kernel = conv.weight
bias = conv.bias
running_mean = bn.running_mean
running_var = bn.running_var
gamma = bn.weight
beta = bn.bias
eps = bn.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta + (bias - running_mean) * gamma / std
def switch_to_deploy(self):
if not self.deploy:
self.stem2[2].switch_to_deploy()
kernel, bias = self._fuse_bn_tensor(self.stem1[0], self.stem1[1])
self.stem1[0].weight.data = kernel
self.stem1[0].bias.data = bias
kernel, bias = self._fuse_bn_tensor(self.stem2[0], self.stem2[1])
self.stem1[0].weight.data = torch.einsum('oi,icjk->ocjk', kernel.squeeze(3).squeeze(2), self.stem1[0].weight.data)
self.stem1[0].bias.data = bias + (self.stem1[0].bias.data.view(1,-1,1,1)*kernel).sum(3).sum(2).sum(1)
self.stem = torch.nn.Sequential(*[self.stem1[0], self.stem2[2]])
self.__delattr__('stem1')
self.__delattr__('stem2')
for i in range(self.depth):
self.stages[i].switch_to_deploy()
self.deploy = True
def update_weight(model_dict, weight_dict):
idx, temp_dict = 0, {}
for k, v in weight_dict.items():
if k in model_dict.keys() and np.shape(model_dict[k]) == np.shape(v):
temp_dict[k] = v
idx += 1
model_dict.update(temp_dict)
print(f'loading weights... {idx}/{len(model_dict)} items')
return model_dict
def vanillanet_5(pretrained='',in_22k=False, **kwargs):
model = VanillaNet(dims=[128//2, 256//2, 512//2, 1024//2], strides=[2,2,2], **kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
def vanillanet_6(pretrained='',in_22k=False, **kwargs):
model = VanillaNet(dims=[128*4, 256*4, 512*4, 1024*4, 1024*4], strides=[2,2,2,1], **kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
def vanillanet_7(pretrained='',in_22k=False, **kwargs):
model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 1024*4, 1024*4], strides=[1,2,2,2,1], **kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
def vanillanet_8(pretrained='', in_22k=False, **kwargs):
model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 512*4, 1024*4, 1024*4], strides=[1,2,2,1,2,1], **kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
def vanillanet_9(pretrained='', in_22k=False, **kwargs):
model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 1024*4, 1024*4], strides=[1,2,2,1,1,2,1], **kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
def vanillanet_10(pretrained='', in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],
strides=[1,2,2,1,1,1,2,1],
**kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
def vanillanet_11(pretrained='', in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],
strides=[1,2,2,1,1,1,1,2,1],
**kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
def vanillanet_12(pretrained='', in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],
strides=[1,2,2,1,1,1,1,1,2,1],
**kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
def vanillanet_13(pretrained='', in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],
strides=[1,2,2,1,1,1,1,1,1,2,1],
**kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
def vanillanet_13_x1_5(pretrained='', in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*6, 128*6, 256*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 1024*6, 1024*6],
strides=[1,2,2,1,1,1,1,1,1,2,1],
**kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
def vanillanet_13_x1_5_ada_pool(pretrained='', in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*6, 128*6, 256*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 1024*6, 1024*6],
strides=[1,2,2,1,1,1,1,1,1,2,1],
ada_pool=[0,40,20,0,0,0,0,0,0,10,0],
**kwargs)
if pretrained:
weights = torch.load(pretrained)['model_ema']
model.load_state_dict(update_weight(model.state_dict(), weights))
return model
VanillaNet 处理图像的主要流程
VanillaNet 是一种简化的神经网络架构,设计目的是在保持高性能的同时,尽量简化网络结构。以下是 VanillaNet 处理图像的主要流程:
1. 输入预处理
图像输入首先通过一个输入层,该层将图像从原始的 RGB 三通道数据转化为适合卷积操作的多通道特征图。
2. 干层(Stem Block)
卷积操作: 输入图像经过一个 4×4 的卷积层,卷积核个数为 C,步长为 4。这个操作将图像从 3 个通道(RGB)映射到 C 个通道,并进行下采样。
目的: 这个卷积操作的目的是减少图像的空间维度,同时增加通道数,为后续的特征提取做准备。
3. 主体结构(Main Body)
VanillaNet 的主体部分包括四个阶段,每个阶段由一个卷积层和一个池化层组成。具体流程如下:
阶段 1, 2, 3:
卷积层: 每个阶段包含一个 1×1 的卷积层,其目的在于尽量减少计算成本,同时保持特征图的信息。
池化层: 使用最大池化(Max Pooling)层,步长为 2。这个操作减少特征图的空间维度(宽度和高度),并增加通道数。
批量归一化: 每个卷积层后添加批量归一化(Batch Normalization)层,以加速训练过程并稳定训练。
阶段 4:
卷积层: 包含一个 1×1 的卷积层,但这个阶段不增加通道数。
池化层: 使用平均池化(Average Pooling)层,主要用于进一步减少特征图的空间维度,为最后的分类做准备。
4. 非线性激活函数
初始激活: 在每个卷积层后应用激活函数(例如 ReLU),增强网络的非线性能力。
深度训练策略: 在训练过程中,激活函数逐渐被削减为恒等映射(identity mapping),以便于卷积层的合并,同时保持推理速度。
5. 全连接层(Fully Connected Layer)
特征映射: 经过上述各阶段的处理后,最终的特征图通过一个全连接层,输出分类结果。
作用: 全连接层将高维特征映射到具体的分类标签。

2.2 更改init.py文件
关键步骤二:修改modules文件夹下的__init__.py文件,先导入函数

然后在下面的__all__中声明函数

2.3 添加yaml文件
关键步骤三:在/ultralytics/ultralytics/cfg/models/v8下面新建文件yolov8_VanillaNet.yaml文件,粘贴下面的内容
- OD【目标检测】
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, vanillanet_5, []] # 4
- [-1, 1, SPPF, [1024, 5]] # 5
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 6
- [[-1, 3], 1, Concat, [1]] # 7 cat backbone P4
- [-1, 3, C2f, [512]] # 8
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 9
- [[-1, 2], 1, Concat, [1]] # 10 cat backbone P3
- [-1, 3, C2f, [256]] # 11 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]] # 12
- [[-1, 8], 1, Concat, [1]] # 13 cat head P4
- [-1, 3, C2f, [512]] # 14 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]] # 15
- [[-1, 5], 1, Concat, [1]] # 16 cat head P5
- [-1, 3, C2f, [1024]] # 17 (P5/32-large)
- [[11, 14, 17], 1, Detect, [nc]] # Detect(P3, P4, P5)- Seg【语义分割】
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, vanillanet_5, []] # 4
- [-1, 1, SPPF, [1024, 5]] # 5
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 6
- [[-1, 3], 1, Concat, [1]] # 7 cat backbone P4
- [-1, 3, C2f, [512]] # 8
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 9
- [[-1, 2], 1, Concat, [1]] # 10 cat backbone P3
- [-1, 3, C2f, [256]] # 11 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]] # 12
- [[-1, 8], 1, Concat, [1]] # 13 cat head P4
- [-1, 3, C2f, [512]] # 14 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]] # 15
- [[-1, 5], 1, Concat, [1]] # 16 cat head P5
- [-1, 3, C2f, [1024]] # 17 (P5/32-large)
- [[11, 14, 17], 1, Segment, [nc, 32, 256]] # Segment(P3, P4, P5)2.4 注册模块
关键步骤四:在task.py的parse_model函数替换为下面的内容
def parse_model(
d, ch, verbose=True, warehouse_manager=None
): # model_dict, input_channels(3)
"""Parse a YOLO model.yaml dictionary into a PyTorch model."""
import ast
# Args
max_channels = float("inf")
nc, act, scales = (d.get(x) for x in ("nc", "activation", "scales"))
depth, width, kpt_shape = (
d.get(x, 1.0) for x in ("depth_multiple", "width_multiple", "kpt_shape")
)
if scales:
scale = d.get("scale")
if not scale:
scale = tuple(scales.keys())[0]
LOGGER.warning(
f"WARNING ⚠️ no model scale passed. Assuming scale='{scale}'."
)
depth, width, max_channels = scales[scale]
if act:
Conv.default_act = eval(
act
) # redefine default activation, i.e. Conv.default_act = nn.SiLU()
if verbose:
LOGGER.info(f"{colorstr('activation:')} {act}") # print
if verbose:
LOGGER.info(
f"\n{'':>3}{'from':>20}{'n':>3}{'params':>10} {'module':<45}{'arguments':<30}"
)
ch = [ch]
layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
is_backbone = False
for i, (f, n, m, args) in enumerate(
d["backbone"] + d["head"]
): # from, number, module, args
try:
if m == "node_mode":
m = d[m]
if len(args) > 0:
if args[0] == "head_channel":
args[0] = int(d[args[0]])
t = m
m = getattr(torch.nn, m[3:]) if "nn." in m else globals()[m] # get module
except:
pass
for j, a in enumerate(args):
if isinstance(a, str):
with contextlib.suppress(ValueError):
try:
args[j] = locals()[a] if a in locals() else ast.literal_eval(a)
except:
args[j] = a
n = n_ = max(round(n * depth), 1) if n > 1 else n # depth gain
if m in (
Classify,
Conv,
ConvTranspose,
GhostConv,
Bottleneck,
GhostBottleneck,
SPP,
SPPF,
DWConv,
Focus,
BottleneckCSP,
C1,
C2,
C2f,
C3,
C3TR,
C3Ghost,
nn.Conv2d,
nn.ConvTranspose2d,
DWConvTranspose2d,
C3x,
RepC3,
):
if args[0] == "head_channel":
args[0] = d[args[0]]
c1, c2 = ch[f], args[0]
if (
c2 != nc
): # if c2 not equal to number of classes (i.e. for Classify() output)
c2 = make_divisible(min(c2, max_channels) * width, 8)
args = [c1, c2, *args[1:]]
if m in (
RepNCSPELAN4,
):
args[2] = make_divisible(min(args[2], max_channels) * width, 8)
args[3] = make_divisible(min(args[3], max_channels) * width, 8)
if m in (
BottleneckCSP,
C1,
C2,
C2f,
C3,
C3TR,
C3Ghost,
C3x,
RepC3,
):
args.insert(2, n) # number of repeats
n = 1
elif m is AIFI:
args = [ch[f], *args]
elif m in (HGStem, HGBlock):
c1, cm, c2 = ch[f], args[0], args[1]
if (
c2 != nc
): # if c2 not equal to number of classes (i.e. for Classify() output)
c2 = make_divisible(min(c2, max_channels) * width, 8)
cm = make_divisible(min(cm, max_channels) * width, 8)
args = [c1, cm, c2, *args[2:]]
if m in (HGBlock):
args.insert(4, n) # number of repeats
n = 1
elif m is ResNetLayer:
c2 = args[1] if args[3] else args[1] * 4
elif m is nn.BatchNorm2d:
args = [ch[f]]
elif m is Concat:
c2 = sum(ch[x] for x in f)
elif m in (
Detect,
Segment,
Pose,
OBB,
):
args.append([ch[x] for x in f])
if m in (
Segment,
):
args[2] = make_divisible(min(args[2], max_channels) * width, 8)
elif m is RTDETRDecoder: # special case, channels arg must be passed in index 1
args.insert(1, [ch[x] for x in f])
elif m is CBLinear:
c2 = make_divisible(min(args[0][-1], max_channels) * width, 8)
c1 = ch[f]
args = [
c1,
[make_divisible(min(c2_, max_channels) * width, 8) for c2_ in args[0]],
*args[1:],
]
elif m is CBFuse:
c2 = ch[f[-1]]
elif isinstance(m, str):
t = m
if len(args) == 2:
m = timm.create_model(
m,
pretrained=args[0],
pretrained_cfg_overlay={"file": args[1]},
features_only=True,
)
elif len(args) == 1:
m = timm.create_model(m, pretrained=args[0], features_only=True)
c2 = m.feature_info.channels()
elif m in {
vanillanet_5,
vanillanet_6,
vanillanet_7,
vanillanet_8,
vanillanet_9,
vanillanet_10,
vanillanet_11,
vanillanet_12,
vanillanet_13,
vanillanet_13_x1_5,
vanillanet_13_x1_5_ada_pool,
}:
m = m(*args)
c2 = m.channel
else:
c2 = ch[f]
if isinstance(c2, list):
is_backbone = True
m_ = m
m_.backbone = True
else:
m_ = (
nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args)
) # module
t = str(m)[8:-2].replace("__main__.", "") # module type
m.np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type = (
i + 4 if is_backbone else i,
f,
t,
) # attach index, 'from' index, type
if verbose:
LOGGER.info(
f"{i:>3}{str(f):>20}{n_:>3}{m.np:10.0f} {t:<45}{str(args):<30}"
) # print
save.extend(
x % (i + 4 if is_backbone else i)
for x in ([f] if isinstance(f, int) else f)
if x != -1
) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
for _ in range(5 - len(ch)):
ch.insert(0, 0)
else:
ch.append(c2)
return nn.Sequential(*layers), sorted(save)2.5 替换函数
关键步骤五:在task.py的BaseModel类下的_predict_once函数替换为下面的内容
def _predict_once(self, x, profile=False, visualize=False, embed=None):
"""
Perform a forward pass through the network.
Args:
x (torch.Tensor): The input tensor to the model.
profile (bool): Print the computation time of each layer if True, defaults to False.
visualize (bool): Save the feature maps of the model if True, defaults to False.
embed (list, optional): A list of feature vectors/embeddings to return.
Returns:
(torch.Tensor): The last output of the model.
"""
y, dt, embeddings = [], [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = (y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f]) # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, "backbone"):
x = m(x)
for _ in range(5 - len(x)):
x.insert(0, None)
for i_idx, i in enumerate(x):
if i_idx in self.save:
y.append(i)
else:
y.append(None)
# for i in x:
# if i is not None:
# print(i.size())
x = x[-1]
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
if embed and m.i in embed:
embeddings.append(nn.functional.adaptive_avg_pool2d(x, (1, 1)).squeeze(-1).squeeze(-1)) # flatten
if m.i == max(embed):
return torch.unbind(torch.cat(embeddings, 1), dim=0)
return x2.6 执行程序
在train.py中,将model的参数路径设置为yolov8_VanillaNet.yaml的路径
建议大家写绝对路径,确保一定能找到
from ultralytics import YOLO
# Load a model
# model = YOLO('yolov8n.yaml') # build a new model from YAML
# model = YOLO('yolov8n.pt') # load a pretrained model (recommended for training)
model = YOLO(r'/projects/ultralytics/ultralytics/cfg/models/v8/yolov8_VanillaNet.yaml') # build from YAML and transfer weights
# Train the model
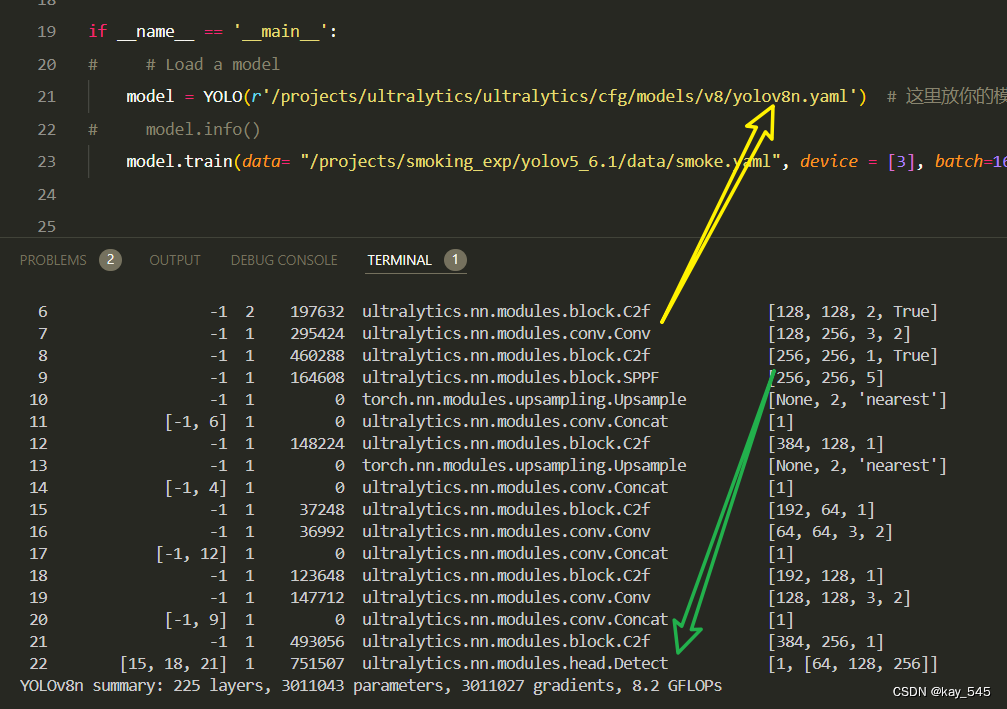
model.train(batch=16)🚀运行程序,如果出现下面的内容则说明添加成功🚀
from n params module arguments
0 -1 1 318592 vanillanet_5 []
1 -1 1 394240 ultralytics.nn.modules.block.SPPF [512, 256, 5]
2 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
3 [-1, 3] 1 0 ultralytics.nn.modules.conv.Concat [1]
4 -1 1 164608 ultralytics.nn.modules.block.C2f [512, 128, 1]
5 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
6 [-1, 2] 1 0 ultralytics.nn.modules.conv.Concat [1]
7 -1 1 41344 ultralytics.nn.modules.block.C2f [256, 64, 1]
8 -1 1 36992 ultralytics.nn.modules.conv.Conv [64, 64, 3, 2]
9 [-1, 8] 1 0 ultralytics.nn.modules.conv.Concat [1]
10 -1 1 123648 ultralytics.nn.modules.block.C2f [192, 128, 1]
11 -1 1 147712 ultralytics.nn.modules.conv.Conv [128, 128, 3, 2]
12 [-1, 5] 1 0 ultralytics.nn.modules.conv.Concat [1]
13 -1 1 493056 ultralytics.nn.modules.block.C2f [384, 256, 1]
14 [11, 14, 17] 1 897664 ultralytics.nn.modules.head.Detect [80, [64, 128, 256]]
YOLOv8_vanillanet summary: 176 layers, 2617856 parameters, 2617840 gradients3. 完整代码分享
https://pan.baidu.com/s/1xBKM9rKjGsrVT2tZ1gm0mQ?pwd=jgdi提取码: jgdi
4. GFLOPs
关于GFLOPs的计算方式可以查看:百面算法工程师 | 卷积基础知识——Convolution
未改进的YOLOv8nGFLOPs
改进后的GFLOPs
现在手上没有卡了,等过段时候有卡了把这补上,需要的同学自己测一下
5. 进阶
可以与其他的注意力机制或者损失函数等结合,进一步提升检测效果
6.总结
VanillaNet 是一种极简主义神经网络架构,通过减少层数、简化操作以及避免复杂的连接方式(如自注意力和残差连接),实现高效的图像处理和分类。其主要原理包括:使用少量的卷积层来提取特征,采用分阶段的设计来逐步下采样特征图和增加通道数,每个阶段包含一个卷积层和一个池化层来简化计算;在训练过程中,通过深度训练策略将初始激活函数逐渐简化为恒等映射,以便合并卷积层和提高推理速度;最终,通过全连接层将高维特征映射到分类标签,从而实现简化结构下的高效分类。这种设计不仅保证了模型的性能,还优化了资源利用,使其适合在计算资源受限的环境中使用。