注:本文为 “永磁同步电机” 相关文章合辑。
图片清晰度,限于引文原状。
略作重排,未整理去重。
如有内容异常,请看原文。
永磁同步电机 – 结构
wangYH.air 已于 2022-10-30 11:21:22 修改
永磁同步电机的结构:
轭部、齿、槽:定子或者转子上有铁心或者绕铜线的地方,绕铜线的地方叫槽,而将槽分开的叫齿,将所有的齿连起来的部位称为轭部(定子冲片槽底与外圆之间形成的区域)。
每极每相槽数: q = Z 2 N p m q = \frac{Z}{2N_p m} q=2NpmZ,其中 N p N_p Np 为极对数, 2 N p 2N_p 2Np 为极数, m m m 为相数。
若 q q q 比较大,采用双层短距绕组(绕组跨距小于一个极距)。
极距:槽数 / 极数。
分布式绕组:将原本集中布置的绕组错槽分开布置,从而实现高次谐波的减低。
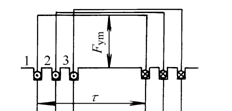
上图中将一个线圈拆分为三个线圈组,分别放到六个槽中,这样每个线圈就会产生各自的磁动势,而且各自的磁动势之间还会存在相位差,磁动势叠加生成的空间合成磁动势将实现谐波抵消。分布绕组对不同谐波的削弱程度不同。
定子槽型:
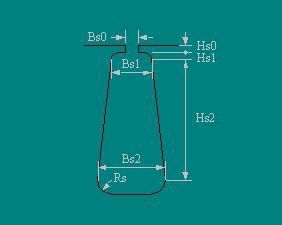
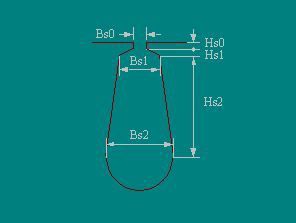
梨形槽具有的半圆槽底可以使绝缘纸与半圆槽底很好地贴合,从而提高槽满率。不过当前电动汽车采用的扁铜线,为提高槽满率,采用矩形槽更多。
由于在电机运行过程中,转矩脉动、电磁径向力会导致电机振动,定子齿部过窄会导致定子齿部机械强度过差,从而导致定子齿部断折。
在电机定子槽型结构设计中,应使得电机定子磁路磁阻最优化,定子磁路不存在磁密奇点,永磁体工作点在电机运行工况范围内位于最优工作点附近。同时,定子槽型选择,应利于电机嵌线,方便电机批量化生产。
槽的深浅:一方面是看磁场从齿的部分走的面积以及轭部的面积比例近似相当,这样保证磁场的路径从齿到轭部的阻力一样。另一方面,槽太深会让齿的径向长度增加,从而降低了定子的圆周方向的刚度,会降低 NVH 性能,增加振动响应。
线型:高速和更高开关频率的代价就是电机定子铜线有高频肌肤效应,会显著地增加发热损失,有时会比中速增加 1/4 损失,那么越高速,浪费的电能越多。解决方案就是在铜线总面积基本不变的基础上用很多细的线,或者是径向很扁的扁铜线来降低肌肤效应的损耗影响。
定子槽开口宽度:
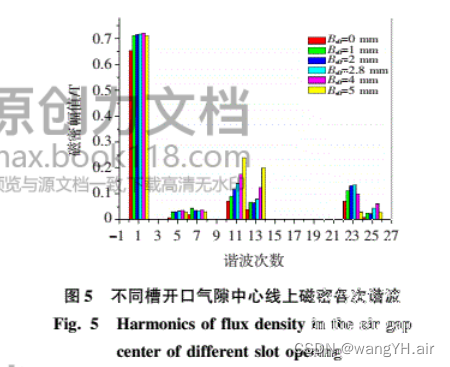
闭口槽磁密小;定子槽开口越大,气隙谐波磁密提高;气隙磁场的高次谐波在转子感应出涡流,从而产生涡流损耗。
槽口宽度的存在使得定子与永磁体磁场之间的有效气隙发生极大变化,进而使气隙磁导发生剧烈变化,影响永磁同步电机的漏电感,使气隙磁密表现出锯齿状波形,从而产生齿槽转矩,使得电机在运行的过程中,产生转矩脉动及噪音,影响了新能源汽车的乘坐舒适性。
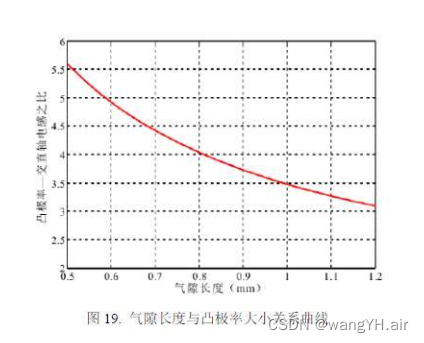
利用电磁仿真软件对电机槽口宽度进行参数化扫描。随着定子槽开口宽度增加,电机等效气隙长度增加,绕组漏电感减小,电机气隙磁密减小,电机凸极率减小,磁阻转矩利用率降低,弱磁效果降低,电机转矩密度降低。但是定子槽开口宽度过小,电机绕组嵌线困难,在不影响电机嵌线的基础上适当减小定子槽开口宽度,有利于电机功率密度的提高。另外,合理选择电机定子槽开口宽度,能够在一定程度上,减小电机齿槽转矩,降低电机震动与噪声。
气隙长度提高,将导致 L q L_q Lq 减小,从而减小了磁阻转矩,而 L d L_d Ld 由于气隙较大,因此受影响较小。
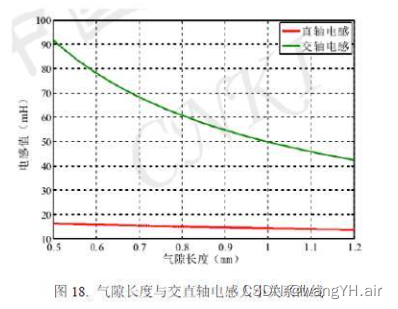
直轴电感足够大的情况下,电机弱磁扩速能力越好。
电流密度:电流密度矢量是描述电路中某点电流强弱和流动方向的物理量。其大小等于单位时间内通过某一单位面积的电量,方向向量为单位面积相应截面的法向量,指向由正电荷通过此截面的指向确定。
转子外圆开槽或者不等气隙的设计:
通过优化转子外圆形状,实现气隙磁密的正弦性,一般是为了针对性降低气隙磁密某些阶次谐波,提升电机 NVH 性能的。
硅钢牌号表示方法:DW + 铁损值(在频率为 50Hz,波形为正弦的磁感峰值为 1.5T 的单位重量铁损值的 100 倍)+ 厚度值的 100 倍。如 DW470-50 表示铁损值为 4.7W/kg,厚度为 0.5mm 的冷轧无取向硅钢,现新型号表示为 50W470。
钕铁硼永磁材料:最高工作温度在 180 摄氏度左右。如果是恶劣环境应用,一般推荐不超过 140 摄氏度。钕铁硼非常容易被腐蚀。因此,成品大多要进行电镀或者涂装。


采用的永磁材料矫顽力越大,抗退磁能力越强。

磁材牌号的分类是按照内禀矫顽力进行区分的。
永磁同步电机(PMSM)的转子结构剖析
贾松(Jason)已于 2023-02-16 08:21:59 修改
永磁同步电机的转子包括永磁体、转子铁芯、转轴、轴承等。
具体来说,根据永磁体在转子铁芯中的位置可以分为表面式和内置式 PMSM。
其中表面式 PMSM 转子结构又分为:表贴式 和 插入式。
内置式 PMSM 转子磁路结构分为:径向式、切向式 和 混合式。
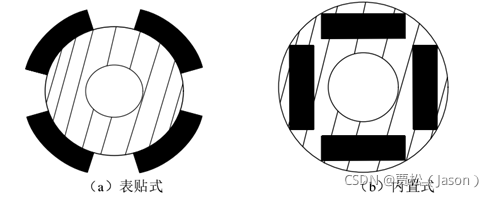
一,首先,介绍一下表面式 PMSM。如下图中的 PMSM 极对数为 2,分别为表贴式和内置式。

表贴式

内置式
在下面的这幅图中已经标出了两种表面式转子的 d d d 轴线与 q q q 轴线的位置, d d d 轴线与电动机的转子磁极所在的轴线重合, q q q 轴线超前 d d d 轴 90 电角度,即相邻两个磁极的集合中性轴线。由于在不同转子中的磁极对数不一样,所以 q q q 轴与 d d d 轴之间的机械角度差是不同的,但是电角度的差都是 90 度。

接下来说一说这种结构的转子的特点:
对于这种表面式的转子结构,永磁体贴在转子圆形铁芯外侧,由于永磁体材料磁导率与气隙磁导率接近,即相对磁导率接近 1,其有效气隙长度是气隙和径向永磁体厚度总和;交直轴磁路基本对称,电动机的凸极率 ρ = L q L d ≈ 1 \rho = \frac{L_q}{L_d} \approx 1 ρ=LdLq≈1,所以表面式 PMSM 是典型的隐极电动机,无凸极效应和磁阻转矩;该类电动机交、直轴磁路的等效气隙都很大,所以电枢反应比较小,弱磁能力较差,其恒功率弱磁运行范围通常较小。由于永磁体直接暴露在气隙磁场中,因而容易退磁,弱磁能力受到限制。由于制造工艺简单、成本低,应用较广泛,尤其适宜于方波式永磁电动机。
二,内置式 PMSM,顾名思义永磁体埋于转子铁芯内部,其表面与气隙之间有铁磁物质的极靴保护,永磁体受到极靴的保护。其结构如下图:

对于内置式 PMSM 其 q q q 轴的电感大于 d d d 轴的电感,有利于弱磁升速,由于永磁体埋于转子铁芯内部,转子结构更加牢固,易于提高电动机高速旋转的安全性。如图所示:

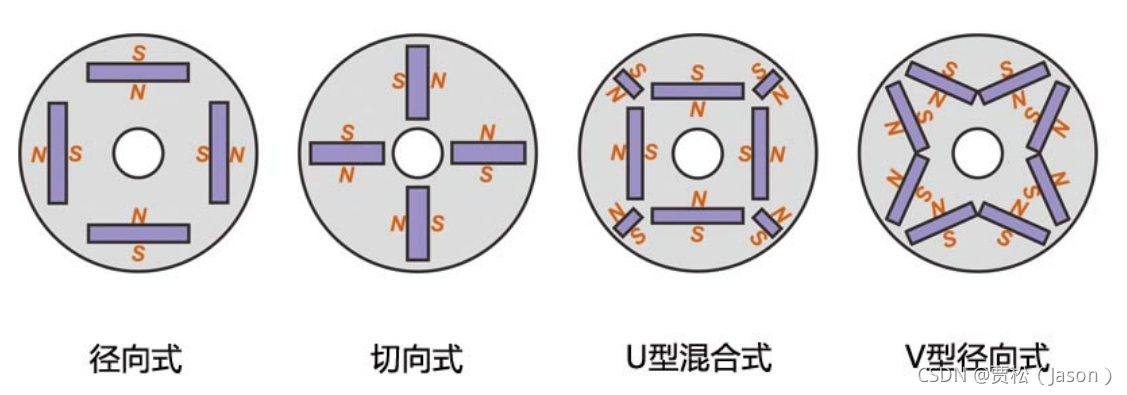
内置式 PMSM 转子磁路结构包括径向式、切向式和混合式。

其中径向式转子磁路如上图第一张,永磁体置于转子的内部,适用于高速运行场合;有效气隙较小, d d d 轴和 q q q 轴的电枢反应电抗较大,从而存在较大的弱磁升速空间。另外, d d d 轴的等效气隙较 q q q 轴等效气隙更大,所以电动机的凸极率 ρ = L q L d > 1 \rho = \frac{L_q}{L_d} > 1 ρ=LdLq>1。转子交、直轴磁路不对称的凸极效应所产生的磁阻转矩有助于提高电动机的功率密度和过载能力,而且易于弱磁扩速,提高电动机的恒功率运行范围。
对于切向式的 IPM 的转子磁路结构,相邻两个磁极并联提供一个极距下的磁通。所以可以得到更大的每极磁通。当电动机的极对数较多时,该结构更加突出。采用切向式结构电动机的磁阻转矩在电动机的总电磁转矩中的比例可达 40%。
径向式结构的 PMSM 漏磁系数较小,不需要采取隔离措施,极弧系数易于控制,转子强度高,永磁体不易变形。切向式结构的 PMSM 漏磁系数大,需要采取隔离措施,每极磁通大,极数多,磁阻转矩大。
此外,还有混合式结构的 PMSM,它结合了径向式和切向式的优点,但结构和工艺复杂,成本高。
永磁电机结构分析:别再看书上抽象的二维结构图了,三维立体一目了然
贾松(Jason)于 2021-11-18 08:44:30 发布
各种各样的电机无非由转子、定子及端盖等组成,一般来说,永磁同步电机的最大的特点是它的定子结构与普通的感应电机的结构非常相似,主要是区别于转子的独特结构与其他电机形成了差别,这也是在本文中主要讲解部分。
在进入本文讲解之前,先给大家推荐一个网站
上面对永磁电机的运行进行了详细的动画演示。本文部分图片来源于此网站。
一、永磁同步电机定子
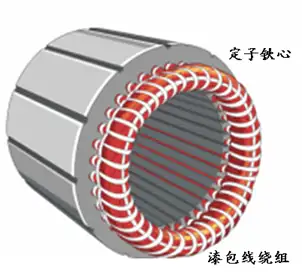
在开头已经提了,永磁同步电机的定子结构与工作原理与常规交流电机基本一样,如图一所示为一个 4 对极 24 槽的定子铁芯。
图一 定子铁心
从上图可以看出,如果不提示是永磁电机定子铁心,是无法与常规其他电机做出区分的。接下来看一看在定子铁芯上加上线圈绕组后是什么样的。图二所示。
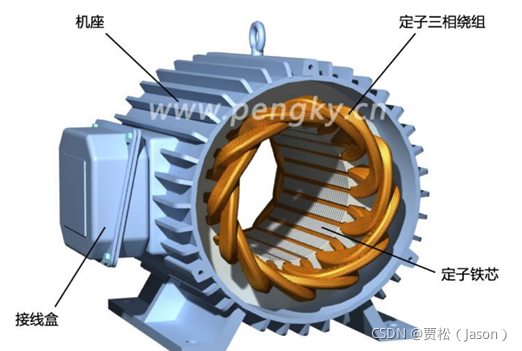
图二 加线圈绕组的定子铁芯
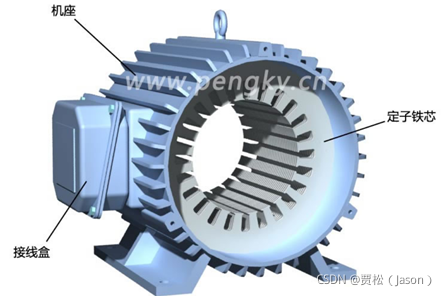
从上图中可以看出电机定子部分由硅钢冲片、对称分布的绕组、固定铁心用的机壳以及端盖等部分组成。
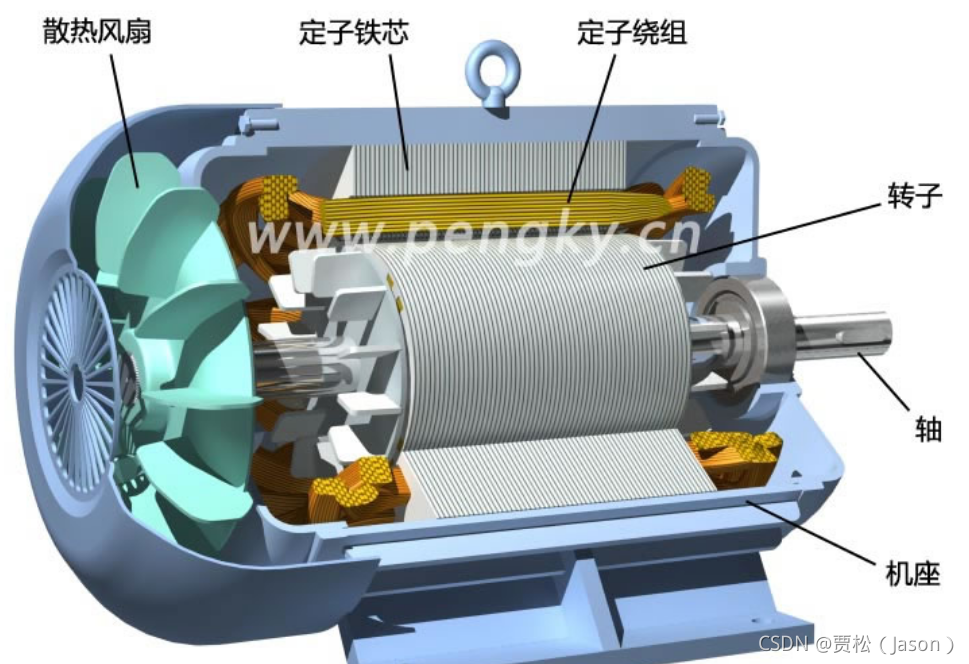
接下来再看一个电机结构整体的图片,图三

图三 电机结构
前面已经说过了定子与一般电机的定子基本相同,主要由定子铁心和定子电枢绕组组成,从彩图中可以看出定子铁心采用叠片结构组成的,这样设计的目的是什么呢,就是减小电机运行时的铁耗,定子电枢绕组一般情况下采用星型接法的三相对称绕组。前面已经说了,永磁电机与普通电机最大的区别在于转子,到底是啥区别呢,就是转子上用永磁体代替了电励磁,从而省去了励磁线圈,而永磁体的材料选择和用量都对电机的性能产生重要影响,现在一般都采用第三代稀土永磁合金 —— 钕铁硼合金,它具有最优异的磁性。关于永磁电机材料在前面的文章中也做了详细的介绍。
二、永磁同步电机转子
转子结构设计才是永磁同步电机的关键技术,不同结构的转子结构将使电机具有不同的电机特性,因此根据转子结构的不同,将永磁同步电机的转子可分为表贴式和内置式两种,如图四所示。
图四 两种转子结构示意图
表贴式永磁同步电机永磁体安装在转子表面,一般为瓦片状。
内置式永磁同步电机的永磁体安装在转子内部,一般为条状。
表贴式的永磁同步电机到底有什么特点呢?
首先,在工业上表贴式是应用最广泛的,其最主要的原因是其拥有很多其他形式电机无法比拟的优点,例如其制造方便,转动惯性比较小以及结构很简单等。并且这种类型的永磁同步电机更加容易被设计师来进行对其的优化设计,其中最主要的方法是设计成近似正弦的分布把气隙磁链的分布结构,将其分布结构改成正弦分布后能够带来很多的优势,例如它所带来的负面效应,能减小磁场的谐波以及应用以上的方法能够很好地改善电机的运行性能。美中不足就是永磁体的暴露使它的磁性有可能消失。
那么内置式的永磁同步电机有什么特点呢?
从上面的示意图中可以看出内置式的永磁同步电机中的永磁体是被安置在转子的内部,相比较而言其结构虽然比较复杂,但却有几个很明显的优点是毋庸置疑的,因为有以高气隙的磁通密度,所很明显的它跟面贴式的电机相比较就会产生很大的转矩;因为在转子永磁体的安装方式是选择内置式的,所以永磁体在被去磁后所带来的一系列的危险的可能性就会很小,因此电机能够在更高的旋转速度下运行但是并不需要考虑转子中永磁体是否会因为离心力过大而被破坏, q q q 轴电感大于 d d d 轴电感这一特点,使得它更容易进行弱磁升速。内置式并不适合进行矢量控制,原因在于它的凸极效应较强。
永磁体在定子中的不同布置方式,图五所示。
图五 永磁体内部布置方式
下面就径向式布置的转子为例做介绍。图六是转子铁芯,为防止永磁体磁通短路,在转子铁芯还开有隔磁空槽,槽内也可填充隔磁材料。
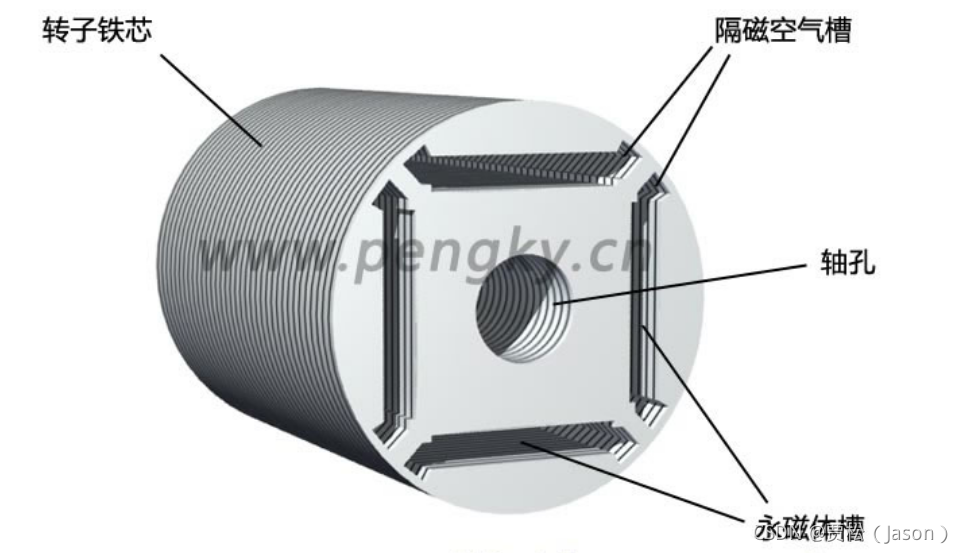
图六 内埋式永磁转子铁芯
然后把永磁体插入转子铁芯的安装槽内,见图七左图。磁极的极性与磁通走向见图七右图,可看出隔磁空槽减小漏磁的作用。
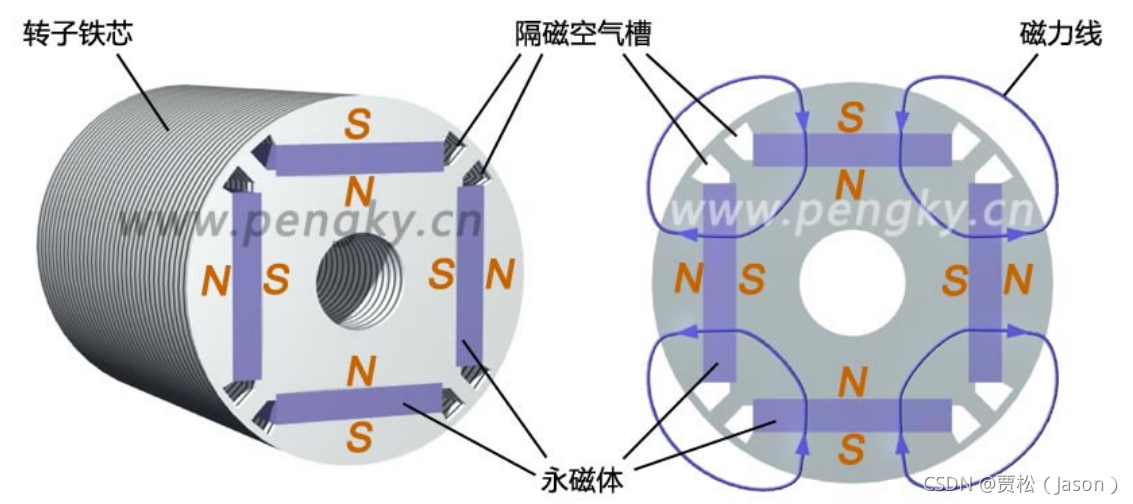
图七 – 内埋式永磁转子磁通
在安装好永磁体的转子铁芯插入转轴,并在转子铁芯两侧安装好散热风扇,见图八所示。
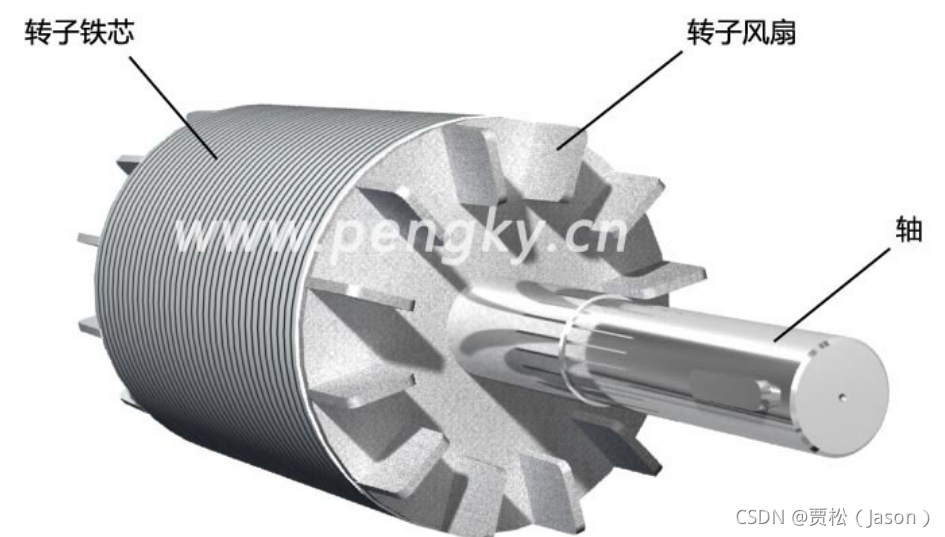
图八 内埋式永磁转子
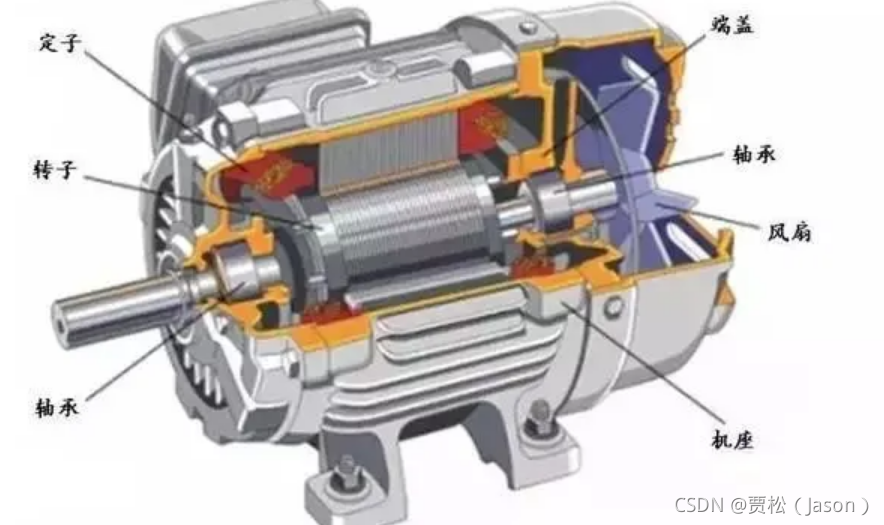
把转子插入定子内,安装好端盖,组装成整机,见图九所示。
图九 永磁同步电动机剖视图
三、永磁电机旋转原理简介
前面对电机转子和定子做了介绍,那么电机到底是怎么转起来的呢?
答:当定子三相绕组通以交流电后,会产生一个旋转磁场,该旋转磁场以同步转速 n n n 旋转,如图十所示。磁极同性相斥、异性相吸的原理大家在小学时都已经学了,正式借助于此原理定子旋转磁场与转子磁场磁极相互吸引,从而带动转子一起旋转。此时,转子也将以同步转速 n n n 旋转。当转子轴加上外部负载转矩时,转子磁极的轴线将与定子磁极的轴线之间会产生一个角度差,当负载越大,角度差也越大,但只要外部负载不超过一定限度,转子就会与定子旋转磁场一起旋转,设其转子转速为 n n n,则有:
[ n = \frac{60f}{p} ]
其中 f f f 表示电源交流电的频率,单位为 Hz, p p p 表示定子和转子的极对数, n n n 即为转子速,单位为 rpm。
直流电机和交流电机的原理和区别是什么?
詹姆斯艾伦
我来回答一下这个问题吧,虽然关注的人不多,但是跟我的专业很近。
我用最简洁最易懂的方式来说一下直流电机和交流电机的工作原理和区别。
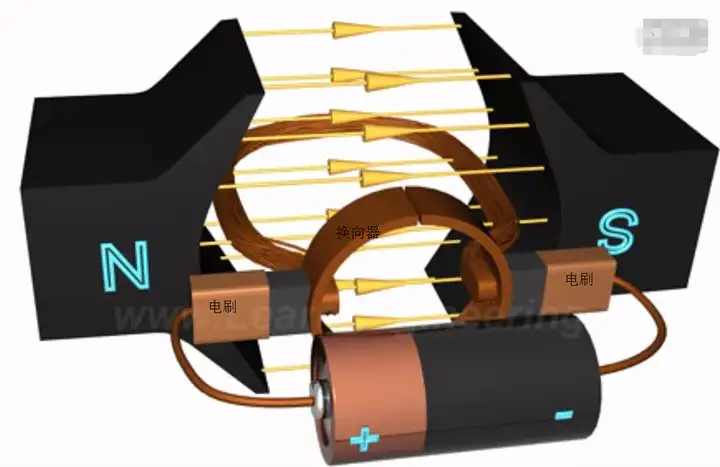
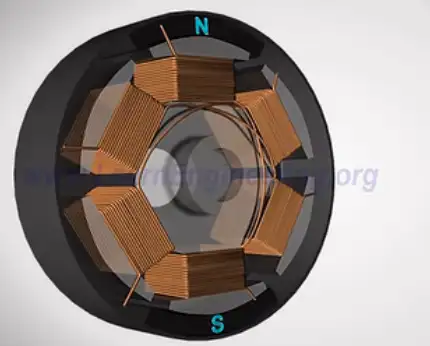
上图就是直流电动机最简单的物理模型。
工作原理:
直流电源电流顺着电源正极流到了左边的电刷上面,电刷和换向器相互摩擦,电流经过左边的换向器(也叫换向片,这个电机有左右两个换向片)流进线圈,从线圈的右边流出来,经过右边的换向片和右边的电刷流回到电源的负极,形成了闭合回路。
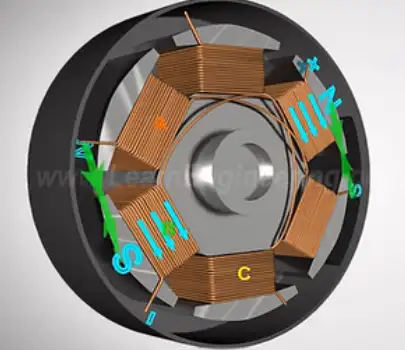
由于线圈处在主磁极(图中的 N 和 S)的磁场中,线圈会受到电磁力的作用,线圈的两个边由于电流的方向不同(左边的电流向里流,右边的向外流),所以两个线圈边受到大小相同方向相反的电磁力,这两个电磁力刚好形成了电磁转矩,在电磁转矩的拉动下,线圈开始转动了。直流电机中线圈嵌放在转子槽中,电动机就开始转动了。
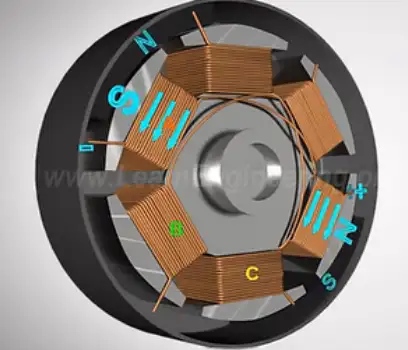
左右换向片跟着转轴转动,而电刷固定不动,转动一圈以后,右边的线圈到了左边,左边的线圈到了右边,但是由于换向片的存在,现在处在左边的线圈内的电流方向和原来处在左边的线圈变的电流的方向一样流向里,所以受到的电磁力方向不变,右边也一样。所以从空间上看,在相同位置的线圈边受的电磁力方向是一直不变的,这就保证了电机的循环转动。
但是一个线圈,由于这个线圈转到不同位置时磁场是不相同的,导致了线圈所受的电磁力也一直在变,所以线圈转起来不稳定,忽快忽慢。所以可以通过多安装几个线圈来保证线圈受力均匀和稳定。
于是就有了这样的,
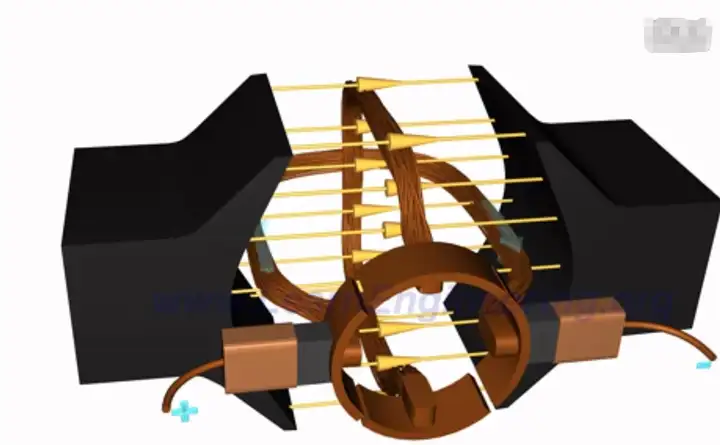
甚至这样的电机模型。
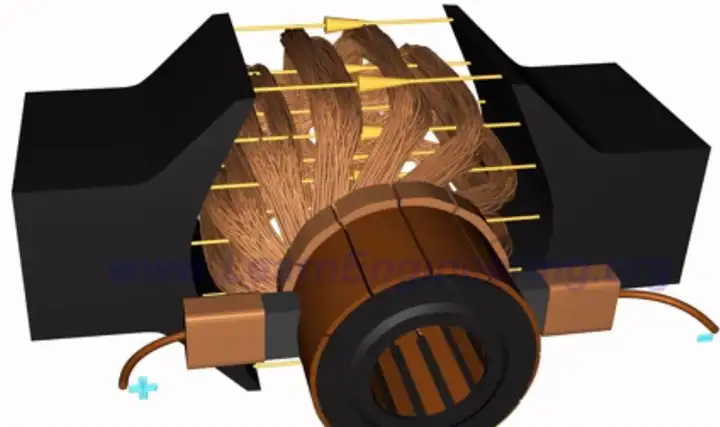
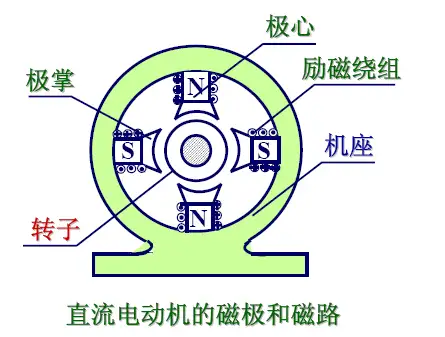
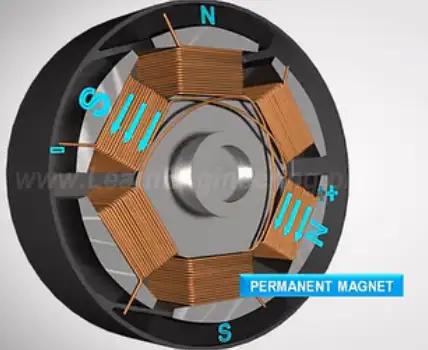
再说外面的两个磁极,其实是有励磁线圈产生的电磁铁,小电机中有永磁铁,稍微大一点的都会用电磁铁。
模型是模型,但真实的电机转子是这个样子的。

再说交流电机:
交流电机分同步和异步电机,同步主要用作发电机,异步主要是电动机。我主要说一下异步电动机吧,由于异步电动机结构简单,价格便宜,维护方便,运行可靠等特点得到了广泛的应用。
交流电机虽然结构简单,但是工作原理其实比直流电机要复杂一点,如果要理解清楚也更加费劲。
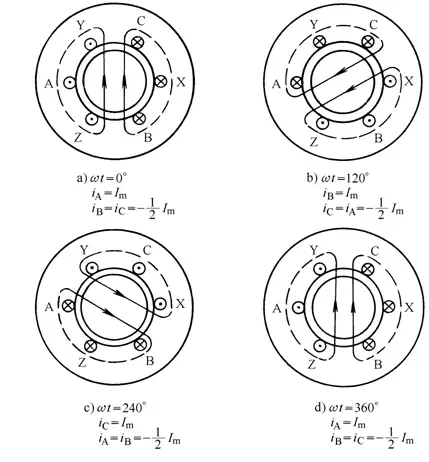
在交流电机的定子上通上三相对称交流电,如上图所示,定子不动,仅仅通过电流的变化就能产生旋转的合成磁场,这个磁场像一个绕着定子旋转的磁铁。
有了这个旋转的磁铁,一切就都好办了,在定子内部随便放一个闭合的线圈,在这个闭合线圈里就会感应出电动势和电流,就会产生电磁力,闭合线圈就会转动起来。
也可以这么理解,定子上有一个旋转的磁铁,转子闭合线圈由于感应带电,其实也变成了一个电磁铁,外面的电磁铁在转,就会带着里面的电磁铁转,于是交流电机的转子就转起来了。
定子磁场的旋转速度叫同步转速,里面转子其实是被定子磁场牵引着在转动,所以它的转速会比定子磁场的转速慢,所以叫异步转速。所以有了异步电动机的名称。

交流电机的转子就是这么简单的几个闭合线圈,或者说闭合导体,像一个鼠笼子一样,所以又叫鼠笼式异步电动机。
另外,由于转子内部的电动势和电流是由于定子磁场感应出来的,所以又把异步电动机叫做感应电动机。所以三相交流异步电动机的名字比较多:交流电机,异步电机,感应电机,都是在说它,是从不同的角度给它起的名字而已。
如果你看的不过瘾,想了解更多的话可以在评论里提问,我会尽力详细的解答。
基础电机本体理论 —— 永磁同步电机的分类与结构
沉沙丶已于 2024-11-14 21:15:43 修改
前言
从最本源的电机本体知识开始。首当其冲的是电机的机械结构,这其实是很多做算法设计的工程师容易忽略的地方。许多控制算法的设计都是直接对电机的数学模型进行分析,但如果在刚学习时,对机械结构有一定的认知并对实物进行一定的观察,会对控制对象有一个直观的认知,使学习更加扎实,而不是空中楼阁。
1 永磁同步电机的应用与概述
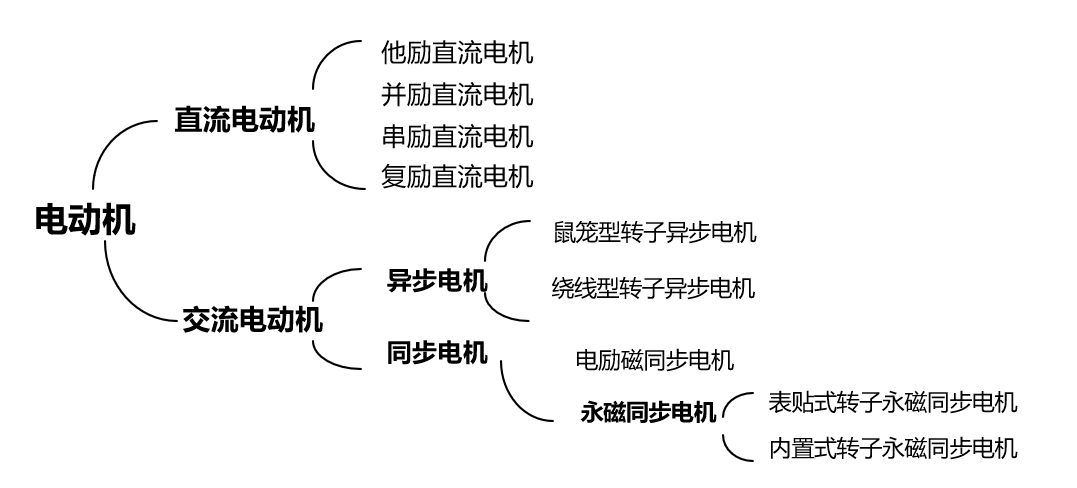
电机是一种将电能转换为机械能的装置,能够产生驱动转矩,作为用电器或各种机械的动力源。电机的研究涉及电学、磁学、力学、动力学和热学等多个物理领域,其种类繁多,分类方法也多种多样。
在电机的分类中,根据工作电源的不同,电机可以分为 直流电机 和 交流电机。直流电机按照励磁方式可以进一步细分为 他励直流电机、并励直流电机 和 串励直流电机。交流电机则根据工作原理的不同,分为 同步电机 和 异步电机。在同步电机中,又包括 电励磁同步电机 和 永磁同步电机。永磁同步电机因其转子内永磁体的安装结构不同,又可区分为 表贴式转子永磁同步电机 和 内置式转子永磁同步电机。
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM) 最早出现于 20 世纪 50 年代。这种电机使用永磁体来产生磁场,替代了传统的电励磁绕组,从而简化了电机结构,减少了加工和装配费用,同时省去了容易出现问题的集电环和电刷,提高了电动机运行的可靠性。由于无需励磁电流,没有励磁损耗,PMSM 的工作效率得到提高。早期的研究主要集中在工频供电的永磁同步电机驱动控制,尤其是其直接启动特性。在没有开关器件、只能工频供电的时代,永磁同步电机通常不具备自启动能力,需要在转子上安装阻尼绕组,依靠阻尼绕组产生的异步转矩启动电机,然后逐步切入由永磁体产生的力矩旋转至同步转速。
一个重要的转折点是在 20 世纪后期,随着电力电子技术与芯片技术的快速发展,以 IGBT(Insulated Gate Bipolar Transistor) 为代表的开关器件开始广泛应用于工业传动领域。IGBT 是一种复合全控型电压驱动式功率半导体器件,兼有 MOSFET 的高输入阻抗和 GTR 的低导通压降两方面的优点,非常适合应用于直流电压为 600V 及以上的变流系统。同时,以 DSP(Digital Signal Processing) 为代表的高性能处理芯片登上历史舞台,这为永磁同步电机的交流变频调速系统提供了物质基础。进一步地,永磁同步电机因其高效率特性,在 电动汽车、新能源、伺服系统 等领域也得到了广泛应用。随着 稀土行业 的迅速发展,永磁同步电机的可靠性得到明显提升,造价也逐年降低。

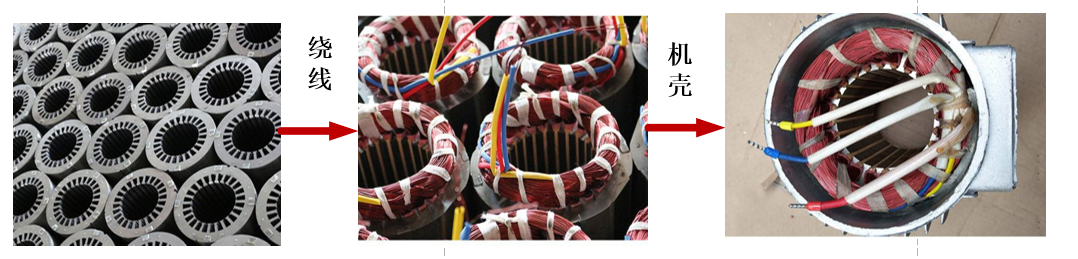
2 永磁同步电机的机械结构
2.1 永磁同步电机的纵切面图
电机的机壳内侧空间被电机的定子绕组所占据,而定子绕组所包裹的内腔则是电机转子的所在位置。在电机的设计中,无论是异步电机、同步电机还是永磁同步电机,其定子绕组的结构在基本形式上是相似的。它们通常都由若干个线圈组成,这些线圈被嵌入定子的槽中,并按照一定的规律连接起来,以产生旋转磁场。
然而,尽管定子绕组在结构上具有相似性,不同类型的电机在转子的构成上却有着显著的差异。在 电励磁同步电机 中,转子由转子绕组和铁芯组成。转子绕组通常是一个简单的笼型结构,它通过集电环和电刷从外部电源接收电流。当电流通过转子绕组时,会产生一个磁场,这个磁场与定子产生的磁场相互作用,推动转子旋转。
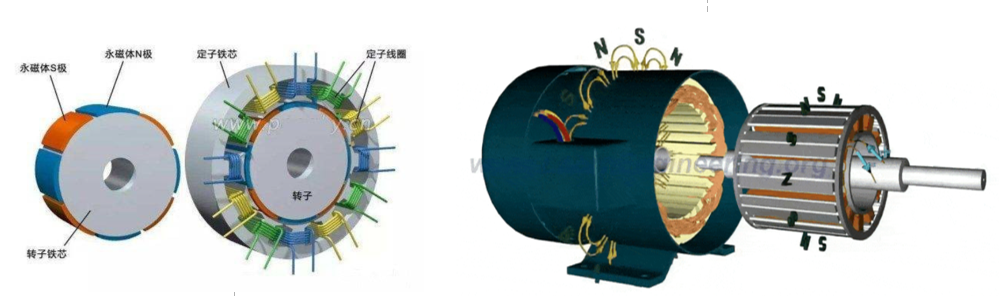
相比之下,永磁同步电机 的转子则由永磁体和铁芯组成。永磁体通常被放置在转子的表面,形成一种称为表贴式的结构,或者嵌入转子铁芯内部,形成内置式结构。转子上不同位置的极性完全由永磁体的极性决定,这种极性是固定的,不可通过外部电源来改变。
当定子绕组通入三相交流电时,由于通电绕组会产生磁场的物理特性,定子绕组侧会产生一个旋转磁场。这个旋转磁场的转速称为同步转速,它取决于电源的频率和电机的极数。在永磁同步电机中,由于转子由永磁体构成,转子上的永磁体会产生一个固定的磁场。当定子的旋转磁场与转子的永磁场相互作用时,会在转子上产生一个力矩,这个力矩推动转子旋转。由于转子的磁场是由永磁体提供的,因此永磁同步电机不需要从外部电源获取励磁电流,这不仅简化了电机的结构,还减少了能量损耗,提高了电机的效率。
2.2 永磁同步电机的定子结构
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)的定子主要由 定子绕组 和 定子铁心 组成。定子绕组通常采用表面绝缘的铜材料,绕制成多匝线圈。这些线圈随后被安装到设计精巧的定子槽中,定子槽的结构设计对于电机的性能有着重要影响。
定子槽的设计必须考虑到线圈的布局和绝缘。线圈之间,以及线圈与铁心之间,需要通过各种不同的绝缘材料进行隔离。这些绝缘材料不仅发挥着绝缘作用,防止电流泄露,同时也起到了固定线圈的作用,保证线圈在电机运行中的稳定性。
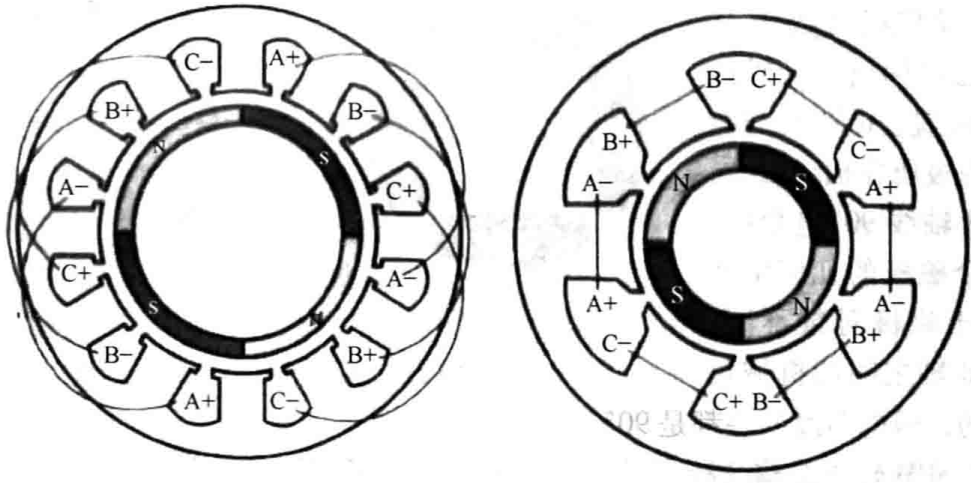
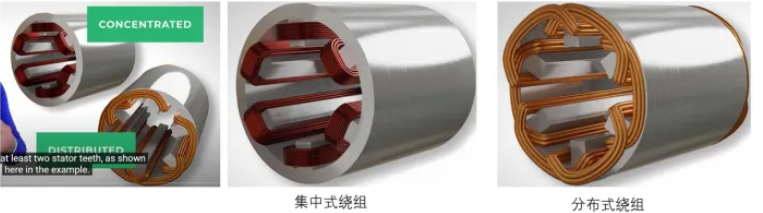
在定子绕组的构成上,存在分布式绕组与集中式绕组两种主要结构。 分布式绕组的特点是磁极线圈相互部分利用铁心,多个磁极线圈共用相同的铁心,这种设计有助于产生更接近正弦波的磁通势。而集中式绕组则是每个磁极线圈完全缠绕在自己独立的铁芯上,一个绕组只针对一个铁芯,这种结构在制造上更为简单,但在磁通势的波形上可能不如分布式绕组理想。
最终,通过将同一相的绕组线圈连接起来,然后将不同磁极下相同相的绕组线圈焊接在一起,构成了电机的一相绕组。尽管定子槽有多个、绕组也有多个,但 最终电机的输出线缆仍为 UVW 三相,这是为了提供三相交流电源,以产生旋转磁场,驱动电机运转。
在材料选择上,定子铁心的材料对电机的性能有着显著影响。非晶合金材料在交变磁场中产生的铁心损耗极低,约为传统硅钢材料铁心损耗的 1/10~1/20,但非晶合金材料对机械应力较为敏感,加工难度较大。随着频率的不断上升,硅钢材料的铁损增加速度要远快于非晶合金材料,在高频下硅钢材料的铁损值高出非晶合金材料铁损值数十倍。因此,根据不同的应用场景和性能要求,选择合适的定子铁心材料是电机设计中的一个重要考虑因素。
在永磁同步电机(PMSM)的设计中,定子绕组的布局方式对电机的性能有着显著影响。分布式绕组和集中式绕组是两种主要的绕组方式,它们各自具有不同的特性和优势。
分布式绕组 是将线圈分散安装在不同的槽中,每个线圈产生自己的磁动势,并且这些磁动势之间存在相位差。这种设计的优势在于,当这些具有相位差的磁动势通过矢量叠加后,可以显著降低电机输出中的谐波含量。如上文中提到的,分布式绕组能够大幅度削弱 3 次、5 次谐波,削弱效果可达 90%,且不会使基波幅值减少超过 5%。这种绕组方式有助于产生一个更接近理想的正弦波形的气隙磁场,从而减少电机运行中的振动和噪声,提高电机的效率和功率密度。
然而,分布式绕组也存在一些缺点。由于线圈分散在多个槽中,绕组的端部较长,这可能导致电机的铜损显著增加。此外,分布式绕组的加工工艺相对复杂,制造成本也相对较高。这是因为分布式绕组需要更精细的绝缘处理和更复杂的线圈连接方式,以确保各个线圈的正确安装和连接。
相比之下,集中式绕组 通常具有较短的端部,这有助于减少铜损,并且制造工艺相对简单,成本较低。但是,集中式绕组可能会产生较高的谐波含量,这可能会增加电机的振动和噪声。
在实际应用中,选择哪种绕组方式取决于电机的设计要求和应用场景。如果优先考虑降低谐波含量和提高电机效率,分布式绕组可能是更好的选择。而如果成本和简化制造工艺是主要考虑因素,集中式绕组可能更受青睐。总的来说,通过优化绕组设计、制造工艺和材料选择,可以显著提高电机的效率、功率密度、运行平稳性和可靠性。
2.3 永磁同步电机的转子结构
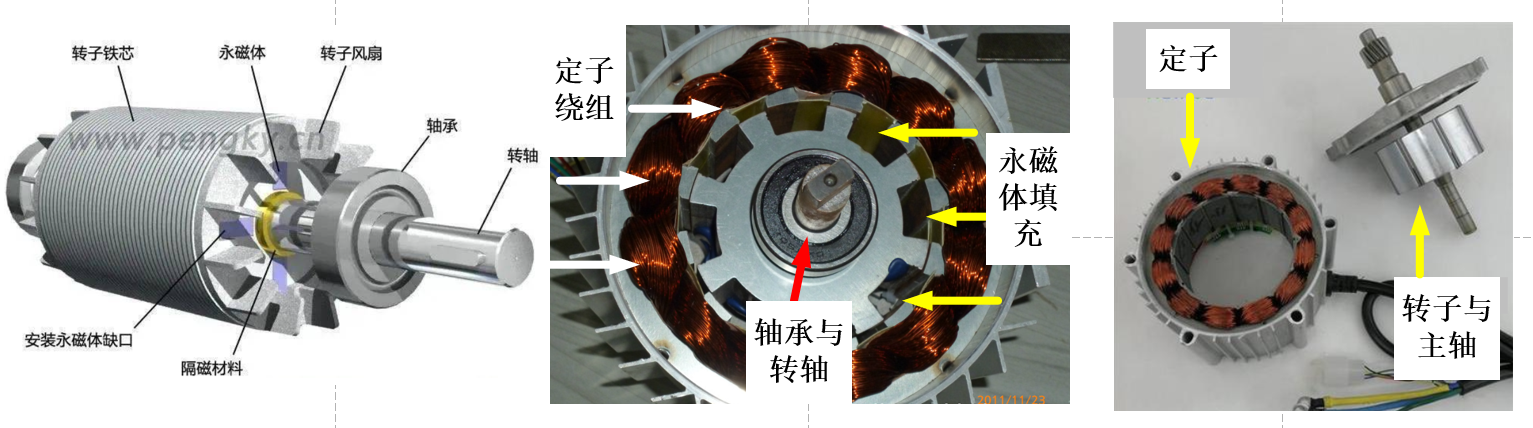
永磁同步电机(PMSM)的转子是电机的核心部件之一,它主要由永磁体、转子铁芯、转轴和轴承等组成。根据永磁体在转子铁芯中的位置,PMSM 的转子结构可以分为两大类:表贴式 和 内置式。
表贴式转子(Surface-Mounted Permanent Magnet, SPM):
- 永磁体通常以瓦片状安装在转子铁芯的外表面。
- 这种结构的转子具有磁路结构简单、制造成本低的特点。
- 由于永磁体直接暴露在气隙磁场中,容易退磁,且弱磁能力受到限制。
- 表贴式转子的磁路结构简单,导致其凸极率接近 1,几乎没有磁阻转矩,因此主要依靠永磁体产生的磁场来产生转矩。
- 适用于方波控制,且在低速或特大体积电机、控制要求高的环境中应用较多。
内置式转子(Interior Permanent Magnet, IPM):
- 永磁体嵌入在转子铁芯内部,通常呈条状。
- 这种结构的转子表面可以制成极靴,极靴内可以嵌入铜条或铸铝,起到启动和阻尼的作用。
- 内置式转子的磁路结构主要有径向式、切向式和混合式三种,它们之间的区别主要在于永磁体磁化方向与转子旋转方向的关系。
- 内置式转子由于磁路不对称,会产生磁阻转矩,有助于提高电机的功率密度和过载能力,且更易于实现弱磁扩速。
- 内置式转子的永磁体受到极靴的保护,不易退磁,且转子结构更加牢固,易于提高电动机高速旋转的安全性。
转子的设计对电机的性能有着重要影响,包括转子波形正弦化、增加 L d L_d Ld、 L q L_q Lq 差值、削弱某次谐波、脉动抑制、保证转子离心力、满足弱磁调速能力、满足电机成本设计要求、满足电机功率因数要求以及保证电机输出功率等方面。此外,为了降低齿谐波,减小谐波转矩及振动噪声,转子铁心往往制作成斜槽结构,即硅钢片扭斜叠压,使转子整体扭斜角度,这种结构形式称为斜极或斜槽。这种设计有助于使绕组的齿谐波相位不同,抵消一部分从而削弱齿谐波,提高电机的运行效率和性能。
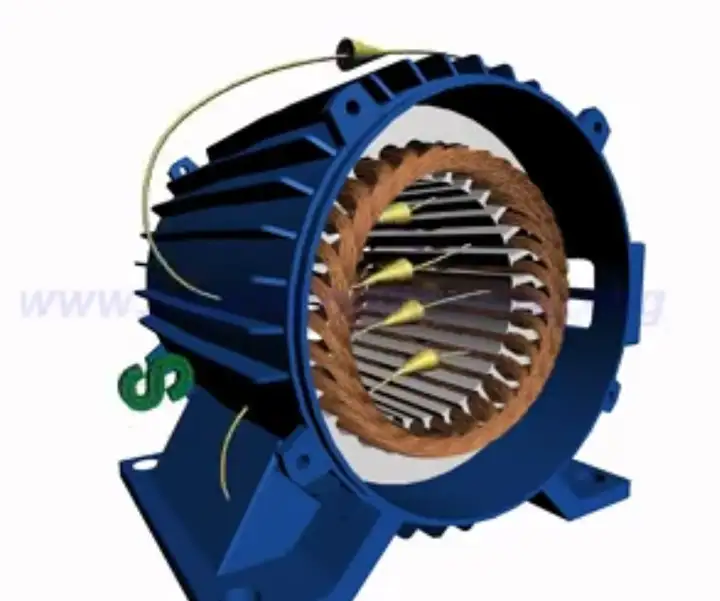
假如把永磁同步电机拆开,其实物图就如下图所示,定子绕组与转子的分布非常清晰,当我们在定子线圈中通入正弦电流产生旋转磁动势时,如果有一双眼睛能够从电机内部观察,那这个原理就更直观了。
2.4 转子材料对电机性能的影响
永磁同步电机的转子使用的永磁材料主要有以下几种:
铝镍钴(AlNiCo):这是最早开发出来的永磁材料之一,由铝、镍、钴、铁和其它微量金属元素构成的合金。铝镍钴永磁具有高剩磁和低温度系数,磁性稳定。它分为铸造合金和粉末烧结合金两种,广泛应用于各种仪器仪表和其他应用领域。但是,铝镍钴在反向磁场下容易退磁,因此不适用于工作在反向磁场下的电机。
铁氧体永磁(Ferrite):主要有钡铁氧体和锶铁氧体,其电阻率高、矫顽力大,适用于大气隙磁路中,特别适于作小型发电机和电动机的永磁体。铁氧体永磁材料不含贵金属镍、钴等,原材料来源丰富,工艺简单,成本低,但其最大磁能积较低,温度稳定性差。
稀土永磁材料:包括稀土钴永磁材料和钕铁硼永磁材料。稀土钴永磁材料具有高剩磁密度、高矫顽力、高磁能积和线性退磁曲线的优异磁性能,特别适合于制造电机。 钕铁硼永磁材料是第三代稀土永磁材料,其剩磁、矫顽力和最大磁能积比稀土钴永磁材料高,不易碎,有较好的机械性能,但其磁性温度系数较高,限制了它的应用。
铁铬钴(FeCrCo):以铁、铬、钴元素为主要成分,还含有钼和少量的钛、硅元素。其加工性能好,可进行冷热塑性变形,磁性类似于铝镍钴系永磁合金,并可通过塑性变形和热处理提高磁性能。用于制造各种截面小、形状复杂的小型磁体元件。
复合材料:由永磁性物质粉末和作为粘结剂的塑性物质复合而成。这类材料尺寸精度高,机械性能好,磁体各部分性能均匀性好,易于进行磁体径向取向和多极充磁。但因含有一定比例的粘结剂,其磁性能比相应的没有粘结剂的磁性材料显著降低。
这些永磁材料的选择取决于电机的具体应用需求,包括成本、性能、温度稳定性和加工难度等因素。例如,钕铁硼因其高磁性能和性价比被广泛使用,而铝镍钴则因其耐高温特性在特定领域有其应用优势。
根据深圳电子技术商会的 2023 年中国稀土永磁材料产业链上中下游市场分析,以及 2024 年中国电机行业研究报告显示,目前应用最多的永磁材料是钕铁硼(NdFeB)。钕铁硼永磁材料属于第三代稀土永磁材料,以其高剩磁、高矫顽力和高最大磁能积等优异的磁性能,成为目前应用最广泛的稀土永磁材料。钕铁硼永磁材料在各类稀土永磁材料中的产量最高,广泛应用于电机、医疗器械、玩具、包装、五金机械、航天航空等领域。

2.5 如何简单评估一个永磁同步电机的性能
我们搞控制的人,实际上对电机本体的了解程度较浅。尤其对其各项指标涉及的技术内容不是很懂。甚至大部分时候电机在我们眼中是一个电与磁交融的黑盒子,我们更多时候都是在控制电流、转矩、转速等,较少关心实际运行过程中电机内部发生的物理变化。隔行如隔山,我们有必要进行学习的是如何去简单评估一个电机的性能,学会如何挑选电机也是很关键的,在此基础上再去评估算法的效果。
在电机设计中,关键的性能指标包括但不限于以下几点:
效率(η):电机将电能转换为机械能的能力,通常以百分比表示。效率越高,能量转换效率越好,能耗越低。在电动汽车、伺服机器人、穿戴设施等对此性能尤为关注。
功率因数(COSφ):电机在交流电源下,实际功率与视在功率的比值。功率因数越高,电机的电能利用效率越高。在大功率工业自动化系统中,高功率因数可以减少电网负荷和提高电能利用率,这对于降低能源成本和提高工厂的整体能效至关重要。
额定功率:电机在额定工作条件下能够输出的最大功率。家用电机其中该项指标的限制较为强制,比如在空调系统中,电机的额定功率必须足够以驱动压缩机,确保在炎热的夏天能有效冷却空间。
额定电压和额定电流:电机在额定工作条件下所需的电压和电流。
转速:电机在额定工作条件下的旋转速度,通常以每分钟转数(rpm)为单位。在磁盘驱动器中,高速旋转的电机可以提高数据读写速度,因此转速是一个关键指标。
扭矩:电机在额定工作条件下能够输出的最大扭矩,用牛・米(N・m)为单位。
温升:电机在长时间运行后,其温度相对于环境温度的升高,用摄氏度(℃)表示。
噪音:电机在运行过程中产生的声压级。在家用电器如吸尘器中,低噪音设计可以提供更舒适的使用体验。
振动:电机在运行过程中产生的振动幅度。在精密仪器如光学扫描设备中,低振动电机可以减少图像模糊,提高扫描质量。
绝缘电阻:电机绕组与地之间的电阻值,反映电机绝缘性能的好坏。
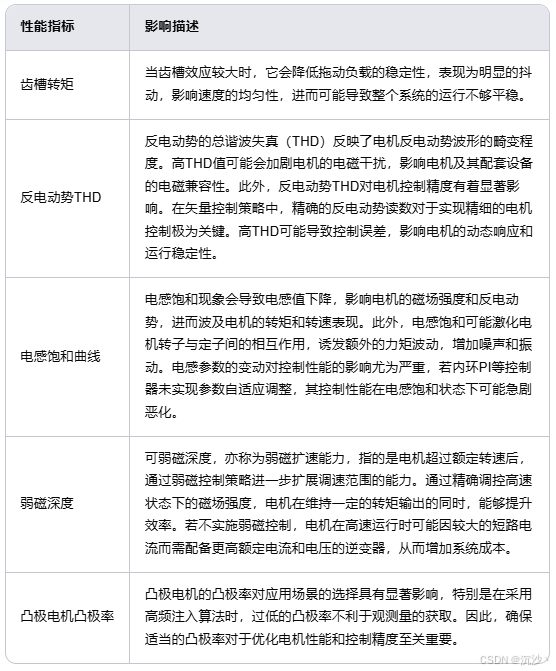
以上是一些标称的内容,大部分电机厂商会将以上数据给到说明书中,还有一些更加精细的评估如下表所示。
2.6 永磁同步电机控制算法所用到的关键参数有哪些?
在永磁同步电机(PMSM)的控制算法中,关键参数对于实现精确的速度和转矩控制至关重要。以下是一些在控制算法中常用的关键参数:
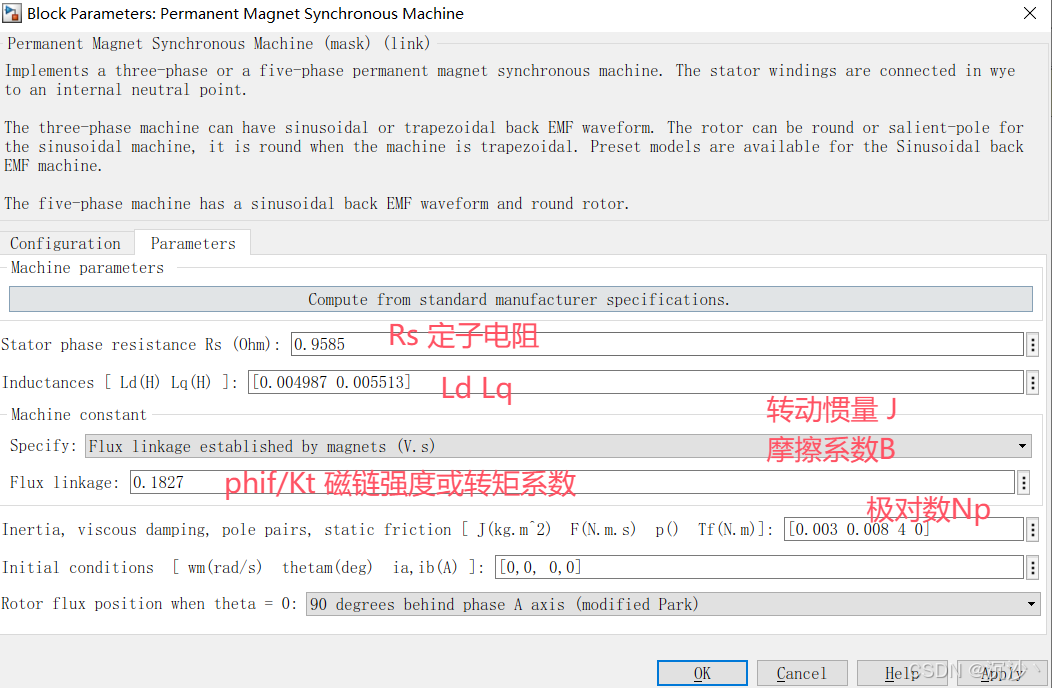
定子电阻( R s R_s Rs):定子电阻影响电机的端电压和电流之间的关系,是矢量控制中的重要参数之一。
直轴和交轴电感( L d L_d Ld 和 L q L_q Lq):这两个参数分别代表电机的直轴和交轴电感值,对于实现精确的磁场定向控制非常关键。
转子磁链( ψ f \psi_f ψf):由永磁体产生的磁链,是影响电机转矩和反电动势的关键因素。
极对数( p p p):影响电机的同步速度,计算公式为 n s = 120 × f p n_s = \frac{120 \times f}{p} ns=p120×f,其中 n s n_s ns 是同步速度, f f f 是电源频率。
扭矩常数( K t K_t Kt):扭矩常数将电机的电磁转矩与电流联系起来,对于转矩控制算法的实现非常重要。
转子惯性( J J J):影响电机的动态响应,包括启动和制动过程。
摩擦系数( B B B):摩擦系数影响电机的机械损耗和低速运行时的稳定性。
额定电流( I r I_r Ir):电机的额定电流,用于确定电机在额定条件下的运行特性。
最大速度( V max V_{\max} Vmax):电机的最大转速,对于控制算法的速度限制至关重要。
编码器分辨率( Q s Q_s Qs):编码器的分辨率直接影响电机位置和速度的测量精度。
PI 控制器参数:比例( P P P)和积分( I I I)参数对于电流和速度环的控制性能有着直接影响。
速度和转矩的参考值:在闭环控制中,速度和转矩的设定值是控制算法的输入,用于指导电机的运行状态。
在 Simulink 中大部分的参数都存在意义对应的设置关系,无论是在进行仿真还是实验,这些参数都是我们必不可少的。其获取的途径最好是数据手册直接标注出来,厂家测量好了。
这些参数在电机控制算法中起着关键性的作用,通过对这些参数的精确测量和控制,可以确保电机的高效和稳定运行。在实际应用中,这些参数可能需要通过实验和调试来优化,以适应特定的应用需求。
3 小结
永磁同步电机的高效率与高可靠性:永磁同步电机(PMSM)由于采用永磁体替代传统电励磁,简化了电机结构,减少了能量损耗,从而提高了工作效率和运行的可靠性。这一优势使得 PMSM 在电动汽车和新能源系统等领域得到了广泛应用。
电机结构设计的影响:电机的定子绕组和转子结构显著影响其性能。特别是分布式绕组有助于产生接近正弦波的磁通势,而转子的不同结构设计,如表贴式和内置式永磁体,对电机的磁路特性和运行效率有着直接影响。
材料选择对性能的重要作用:定子铁心材料和转子永磁材料的选择对电机的性能至关重要。非晶合金材料和钕铁硼永磁材料因其在性能上的优异表现,常被优先考虑用于电机制造。
评估电机性能的关键指标:电机自身存在一系列性能指标,如效率、功率因数、温升、噪音和振动等,用于评估电机的性能。这些指标对于选择合适的电机型号和优化电机控制算法具有重要意义。
4 参考文献与资料
- Design and FEM Analysis of High‐Torque Power Density Permanent Magnet Synchronous Motor (PMSM) for Two‐Wheeler E‐Vehicle Applications - Sundaram - 2022 - International Transactions on Electrical Energy Systems - Wiley Online Library
- 2024 年中国钕铁硼行业新能源汽车应用现状分析 新能源汽车钕铁硼材料应用需求快速增长【组图】_行业研究报告 - 前瞻网
- 2020-2025 年全球及中国钕铁硼永磁材料各应用领域需求预测_观研报告网
FOC 控制理论 —— 从根源上解释电流环 PI 参数如何设计
沉沙丶已于 2024-11-14 21:10:52 修改
前言
在现代工业自动化和新能源汽车领域,永磁同步电机(Permanent Magnet Synchronous Motor,简称 PMSM)以其高效率、高性能和紧凑的结构设计,成为了驱动系统的首选。在 PMSM 的高效运行背后,电流环的精确控制无疑是其矢量控制系统中的核心。本文将探讨电流环如何通过 PI(比例 - 积分)控制器实现对电机电流的快速和准确控制,从而确保电机转矩的精确输出。
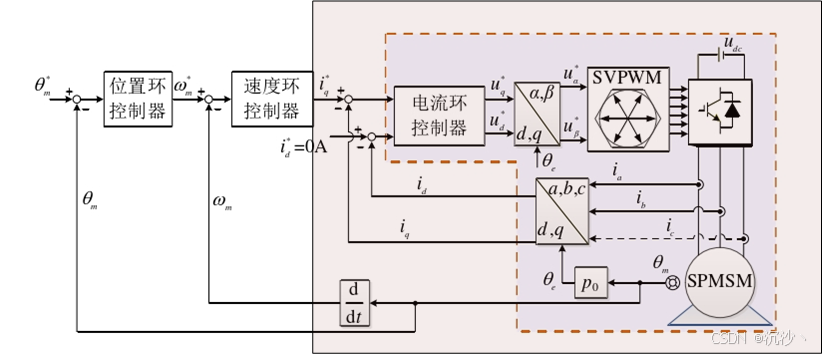
矢量控制中电流环的重要性
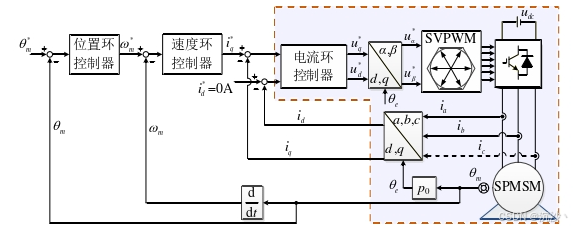
矢量控制技术,也称为磁场定向控制(Field Oriented Control,FOC),通过将电机的三相电流分解为两个正交的分量 —— 直轴(d 轴)和交轴(q 轴)电流,实现了对电机磁场和转矩的独立控制。这种控制方式不仅提高了电机的动态性能,还优化了其效率和转矩输出,整体控制框图如下图所示。
在这一控制框架下,电流环扮演着至关重要的角色。它负责实时监测和调整电机的电流,确保电机按照预定的控制策略运行。电流环的性能直接影响到电机的响应速度、稳定性以及整体效率。
电流环的基本控制:PI 控制器
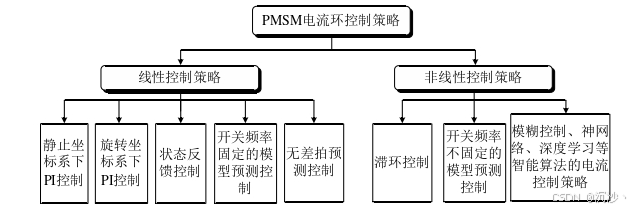
为了实现电流环的精确控制,工程师们通常采用 PI(比例 - 积分)控制器。这种控制器通过比例(P)环节快速响应电流偏差,而积分(I)环节则用于消除稳态误差,确保电流的长期稳定。PI 控制器的这种组合,使得电流环能够在短时间内对电流变化做出反应,同时保持长期的稳定性。当然,也存在许多其他控制方式,较为基础的分类如下所示。
尽管后续有许多进阶版本的电流环控制策略,但 PI 调节器仍然是“性价比”最高的一种方式。目前本篇文章定位为系列的第二篇,目的是夯实基础与技能巩固,因此本部分专注于对最传统的 PI 调节器进行分析与验证,后续进阶篇会针对其他电流环策略进行拓展。
电流环的挑战与机遇
尽管 PI 控制器为电流环提供了强大的控制能力,但在实际应用中,工程师们仍面临着诸多挑战。例如,电机参数的变化、外部负载的扰动以及控制系统的非线性特性,都可能影响到电流环的性能。因此,如何设计和调整 PI 控制器的参数,以适应不同的工作条件和要求,成为了电机控制领域的一个热点问题。
本文将深入探讨电流环的设计原理、PI 控制器的参数整定方法,以及在实际应用中如何优化电流环的性能。通过这些内容,我们希望能够为读者提供一个全面的视角,了解电流环在永磁同步电机矢量控制系统中的关键作用,以及如何通过技术创新来提升电机的性能和效率。
1 电机模型
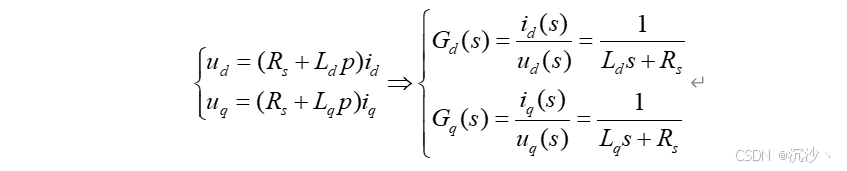
永磁同步电机电流内环的设计,离不开对电压平衡方程的分析。永磁同步电机的电压平衡方程如下所示:

忽略耦合项后,对其进行拉氏变换可得到电压和电流的传递函数:
2 电流内环结构
基于上述推导的传递函数,电流内环系统结构如下图所示。
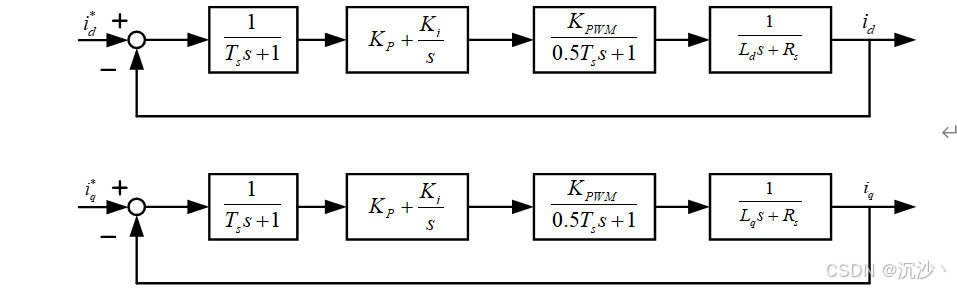
除了 PI 调节器外,另外两个小惯性环节分别为:
- 来源于调制模块的近似传递函数: K pwm 0.5 T s s + 1 \frac{K_{\text{pwm}}}{0.5 T_s s + 1} 0.5Tss+1Kpwm,其中 K pwm K_{\text{pwm}} Kpwm 在不考虑逆变器非线性等因素的条件下等于 1。
- 来源于 DSP/STM32 等模块占空比加载延迟一拍: 1 T s s + 1 \frac{1}{T_s s + 1} Tss+11
这里的 T s T_s Ts 在许多地方被描述为采样时间,实际上用开关周期 T pwm T_{\text{pwm}} Tpwm 表述更为合适。当一个载波周期仅进行单次采样时,采样时间 T s = T_s = Ts= 开关时间 T pwm T_{\text{pwm}} Tpwm。实际上,在较多的应用场景中会在一个载波周期内进行多次采样取平均值,这样做能够减少采样噪声的影响。后续的分析默认单个周期采样一次,系统传递函数满足上述结构。
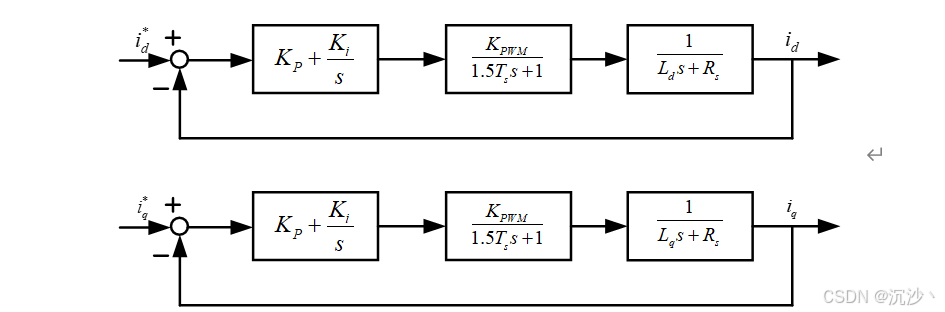
当开关频率较高时,可将小惯性环节合并处理,近似后系统的闭环传递函数结构如下所示:
3 开环系统特性分析
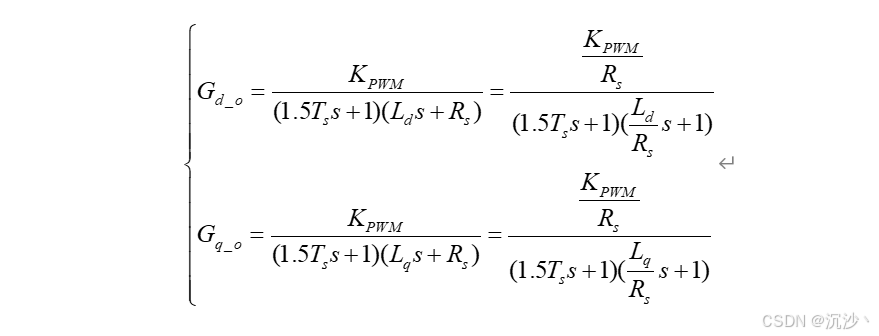
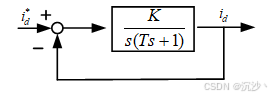
在进行闭环 PI 参数整定之前,对开环特性的分析有助于对闭环系统的理解。在系统不存在任何反馈结构的情况下,系统的开环传递函数为:
搭建 Simulink 模型进行系统的控制特性分析,仿真如下图所示。利用 MATLAB 自带的线性系统特性分析工具,可以较为方便地分析系统特性。
具体操作:点击 Linearization Management -> 电机 Model linearizer 工具 -> 点击 bode。

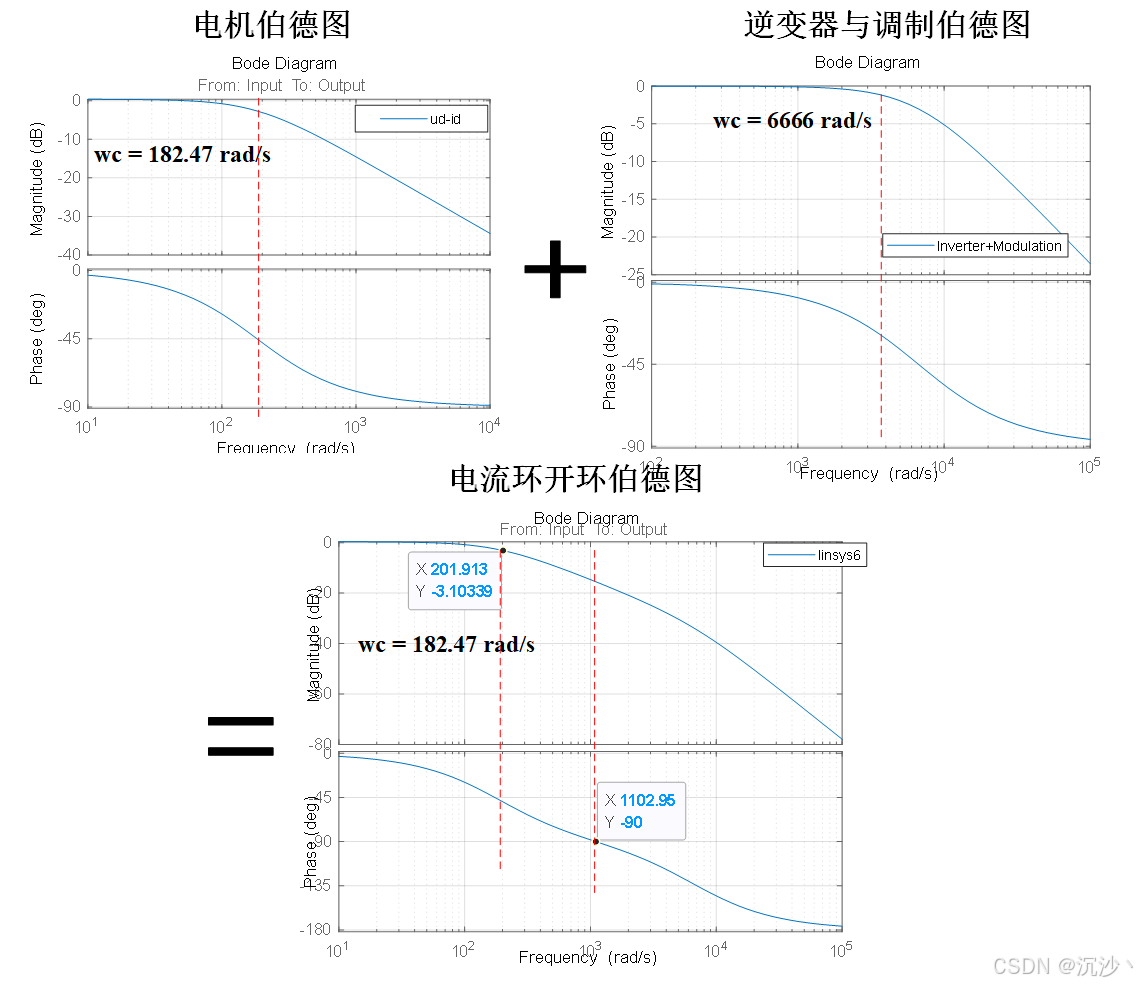
系统的伯德图分析如下图所示(此时代入电机参数 L d = 0.00525 L_d = 0.00525 Ld=0.00525, R s = 0.958 R_s = 0.958 Rs=0.958):
进一步地,系统开环传递函数的零极点分析也能得到分析,零极点分布如下图所示。系统存在两个极点,一个极点由电机参数决定,实轴大小为 x = − R s L x = - \frac{R_s}{L} x=−LRs;另一个极点由逆变器和调制模块的时间常数决定,其实轴大小为 x = 1 1.5 T s x = \frac{1}{1.5 T_s} x=1.5Ts1。其中由电机参数决定的极点起到主导作用。
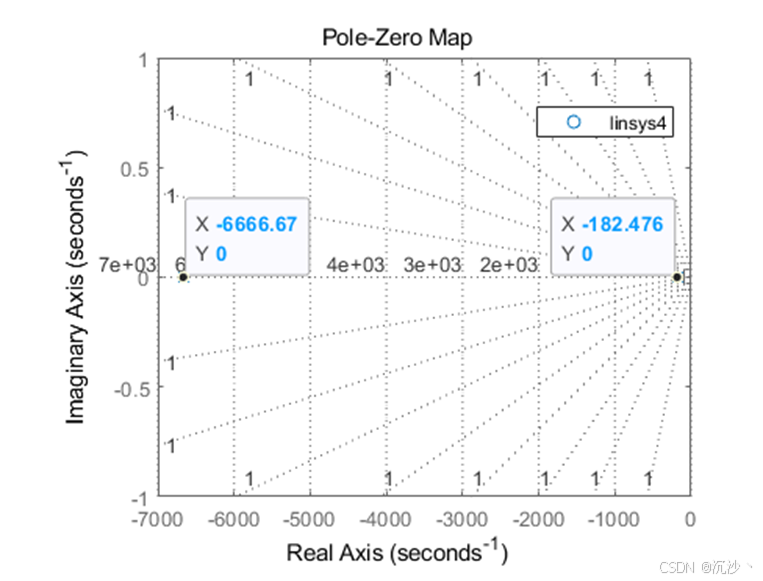
通过以上的 Bode 图和零极点分布图可以得到以下关键信息:
- 电机自身的伯德图类似于一个一阶低通滤波器,其截止频率为 h h h rad/s ( h = R s L d q ) (h = \frac{R_s}{L_{dq}}) (h=LdqRs)。
- 开关频率较高时,逆变器的截止频率也较高,逆变器 + 调制环节对整体电流环开环伯德图影响较小。
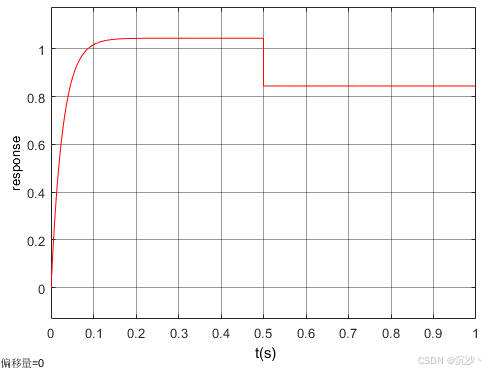
此时对开环传递函数施加一个单位阶跃指令,在 0.5 s 时施加外部扰动 - 0.5。可以看到系统的响应如下图所示。系统不仅跟随存在静态误差,在施加外部扰动后也无法收敛到给定,此时的系统性能较差。
4 PI 参数整定原理及参数计算
电流内环的作用是在电机启动过程中能够以最大电流启动,同时在外部扰动时能够快速恢复,加快动态跟踪响应速度,提高系统的稳定性。依据陈伯时老师的《电力拖动自动控制系统 – 运动控制系统(第 4 版)》中阐述的理论,将电流环的开环传递函数整定为一个典型 I 型环节有利于电机的快速启动和抗扰动。
典型 I 型环节的开环传递函数如下所示,该典型 I 型系统存在两个关键参数,即开环增益 K K K 以及惯性环节时间常数 T T T。

电机的开环传递函数为:

要想将电机的开环传递函数整定成典型 I 型环节,就必须去除一个分母中的 ( A s + 1 ) (As + 1) (As+1) 形式,而 PI 调节器的传递函数为:

实际上,这个过程就是用 PI 调节器的零点去对消电流内环传递函数中的极点,用零极点对消的方式消除由电机参数决定的那个极点。具体对消的过程如下所示:
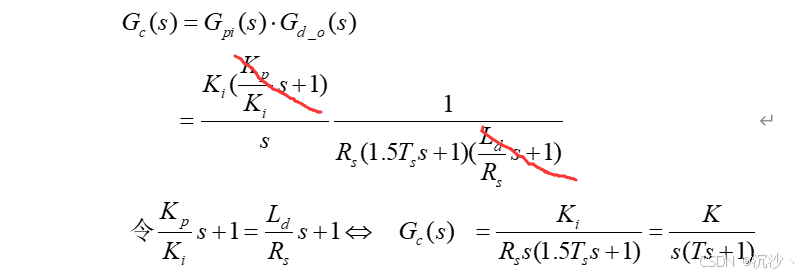
开环增益 K K K 以及惯性环节时间常数 T T T 可被表示为:
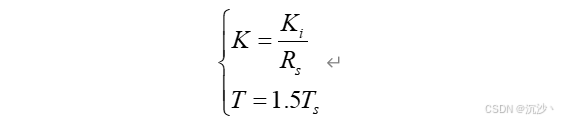
回顾一下陈伯时老师的《电力拖动自动控制原理》书籍中关于工程整定法的章节,一阶系统按 K T = 0.5 KT = 0.5 KT=0.5 时系统性能最佳。最终可以得到 PI 调节器的参数:

上述公式为 d 轴的参数计算公式,q 轴的计算公式与此同理,只需将其中的 L d L_d Ld 替换成 L q L_q Lq 即可。当电机类型为隐极性电机时,dq 轴电流环参数一致,只有凸极性电机 dq 轴电流环参数不一致。
搭建仿真验证,仿真结构框图如下所示:

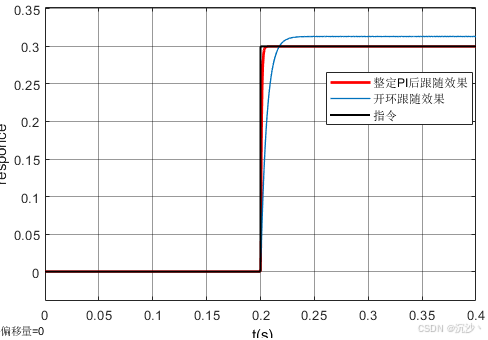
结果如下图所示,图中黑色为整定 PI 后闭环跟随的效果,蓝色为开环跟随的效果。可以看到从跟随指令的角度,整定后的电流环具备更快的响应速度,且无静态误差。
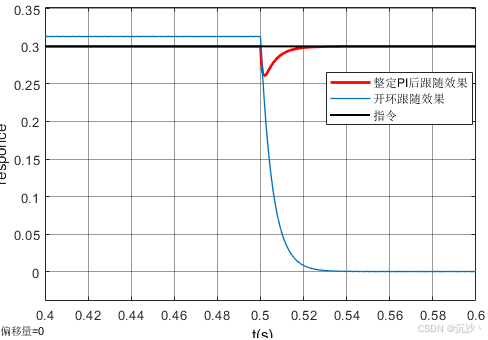
下图为抗干扰性能测试,可以看到整定 PI 后抗扰动效果明显优于开环效果。开环在施加了 0.3 的扰动后直接失控,其输出值一直保持为 0。而闭环整定 PI 后的跟随结果能够在出现跌落后,快速恢复到指令值。
5 为什么用开环整定?
在控制系统设计中,我们经常采用开环整定而不是直接整定闭环性能,这背后有着深刻的原因。对于典型的 I 型系统,开环参数直接影响闭环系统的行为,这一现象是由 I 型系统固有的结构特性所决定的。有兴趣深入了解的读者可以尝试推导这类系统的闭环传递函数,通过这一过程,可以清晰地观察到 开环参数 K K K 和 T T T 是如何决定闭环系统的阻尼比和自然频率的。这两个参数是闭环性能的决定性因素,它们直接关联到系统的动态响应和稳定性。
系统的结构框图如下所示:
其闭环传递函数如下所示,这是一个二阶系统的标准形式:
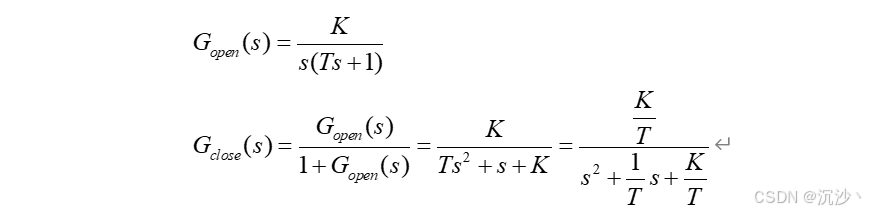
系统的阻尼比和自然频率为:
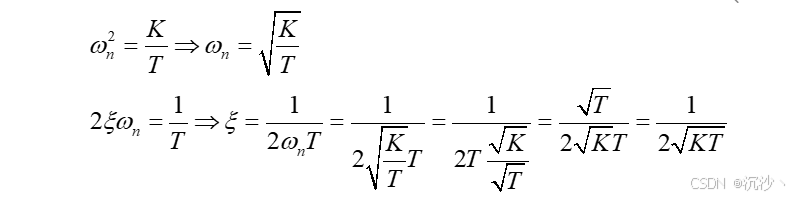
对于一个闭环传递函数为二阶时,通常配置阻尼比为 0.707,从而得出 K T = 0.5 KT = 0.5 KT=0.5 为最优参数,这里就是其来源。
这里值得一提的是,二阶系统的最优阻尼比通常被认为是 0.707,这个值是基于对系统瞬态响应和稳态误差之间权衡的结果。以下是为什么 0.707 是一个常见最优阻尼比的解释:
- 瞬态响应:阻尼比 ζ \zeta ζ 影响系统的瞬态响应。较低的阻尼比会导致较大的超调和振荡,而较高的阻尼比会减少超调但增加系统的上升时间。
- 调整时间:阻尼比也影响系统的调整时间。对于给定的自然频率 ω n \omega_n ωn,阻尼比为 0.707 的系统具有最短的调整时间,这是从瞬态响应的角度来看的。
- 超调量:对于阻尼比 ζ = 0.707 \zeta = 0.707 ζ=0.707 的系统,超调量大约为 4.6%。这是一个可接受的超调量,对于许多应用来说是合适的。
- 阻尼比和自然频率的关系:阻尼比和自然频率共同决定了系统的瞬态响应。阻尼比为 0.707 的系统在自然频率和阻尼比之间提供了一个良好的平衡。
简而言之,开环参数的整定之所以重要,是因为它们在 I 型系统中扮演着塑造闭环性能的关键角色,并且配置起来简单快捷。通过调整开环参数,我们能够间接但有效地控制闭环系统的特性,从而达到预期的控制效果。这种间接控制的方法不仅实用,而且为系统设计提供了灵活性和深度。
6 电流环调试方法及验证思路(Simulink)
在完成了理论的梳理以及纯传递函数的仿真后,我们希望结合 PMSM 电机以及 Simulink 环境完整地验证以上理论,这样也能更加便于实操。电机控制的每个细节都是由实物及物理定律支持的,因此我们可以通过仿真来验证理论的正确性。
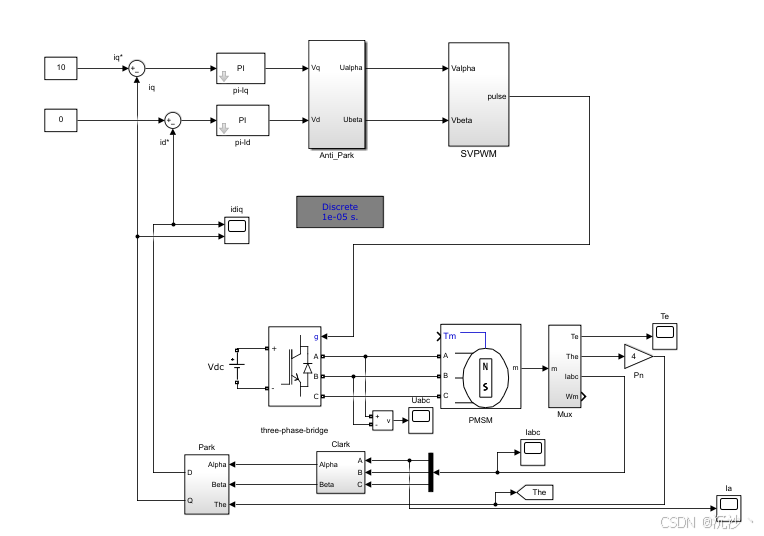
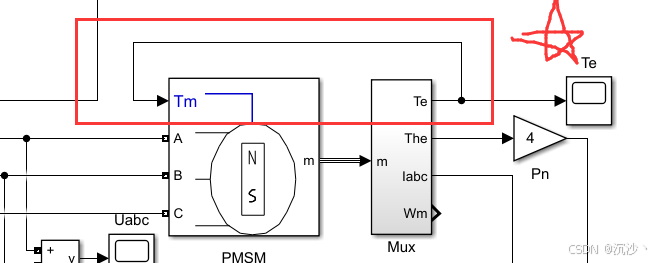
开始搭建电流环仿真,如下图所示。我们去除了速度环,配置了基础的其他模块,包括逆变器模块、PMSM、Clark 变换、Park 变换、PI 调节器、SVPWM 模块,这些模块共同组成了电流内环控制系统,我们仅聚焦于图中红色部分。
搭建的仿真模型可以发我邮箱我直接发给你们(博客下留言),仿真模型如下所示:
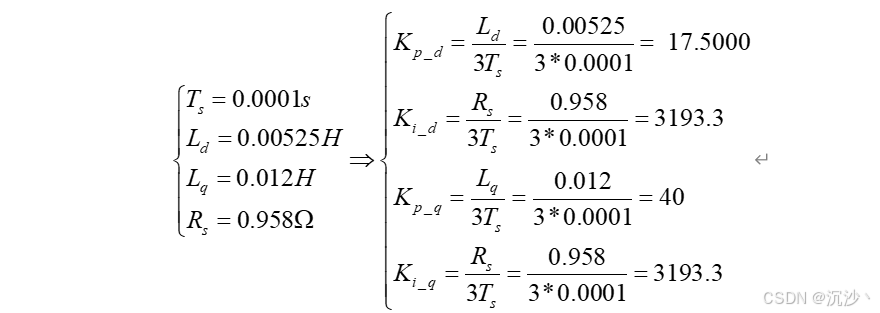
其中电机参数如下表所示:

根据上文所述的 PI 参数计算公式可以得到 dq 轴电流环的 PI。为了以更加清晰的例子展现以及对应上单位大小(这个问题之前有同学问过),具体的计算过程如下:
代入模型中,在进行仿真之前有一个细节是其他地方很少讲到的,需要将电机的输出转矩接入到负载转矩中,如下图所示。这样做的好处有两个:
- 避免耦合项的影响,此时电机堵转,电角速度为 0,满足前文整定参数的假设。
- 避免电机在电流指令下出现转速跑飞,电流环的测试 i q i_q iq 往往会给一个恒值, i q i_q iq 是转矩电流。在这种情况下电机会持续输出力矩,这意味着电机会持续加速,直至跑飞,进而无法验证控制效果。
仿真结果的图表如下所示。在仿真中,直轴电流( i d i_d id)的给定信号在 0 至 0.5 秒内设定为 5 安培,而在 0.5 至 1 秒内设定为 0 安培;交轴电流( i q i_q iq)的给定信号在 0 至 0.5 秒内设定为 5 安培,随后在 0.5 至 1 秒内增加至 10 安培。从图中可以观察到,电流响应能够紧密跟随给定值,且无静态误差,显示出快速的响应速度和基本无超调的特性。此外,在 0.8 秒时,引入了一个外部负载扰动。图表中清晰地显示了电流能够迅速从扰动中恢复至设定值,表明系统具有出色的抗扰动性能。
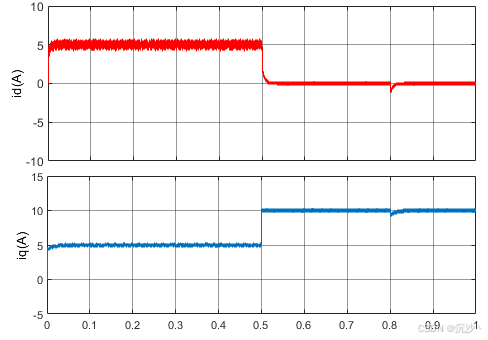
再次强调:电流环的 PI 参数调试建议在堵转工况进行。
7 更换电机如何快速设计参数及调试仿真
在实验中,研究对象往往不仅限于单一电机。当电机参数发生变化时,原有的 PI 控制参数可能不再适用,这就要求我们重新设计参数。为此,我们开发了一个快速设计参数的小工具。该工具基于 MATLAB 平台,用户只需输入电机参数,即可自动计算出新的 PI 控制参数。这里主要针对电流环的 PI 参数进行调整,而不涉及母线电压、开关频率等其他因素的变化。只需调整电机参数,仿真框架本身无需修改。在电机参数更新后,用户只需将小工具计算出的 PI 参数输入到调节器中,即可实现参数的快速更新。
例如,假如电机参数更改为以下表格所示电机参数:
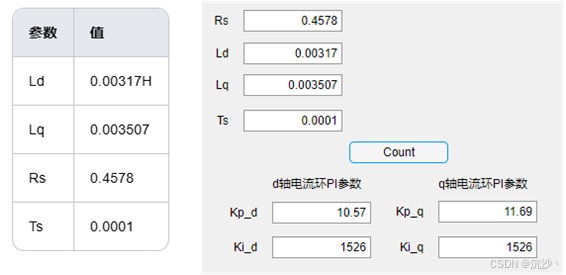
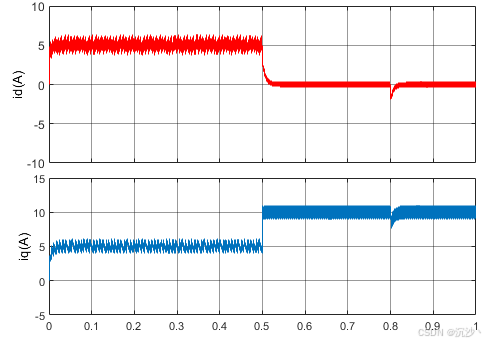
将该参数代入到仿真中,仿真结果如下所示。图中仿真结果显示更换电机参数后,按照以上公式计算 PI 参数能够实现电流的快速跟踪,并且系统还具备较好的抗扰性能。
小结
- 矢量控制与电流环的重要性
- 电流环在矢量控制中扮演核心角色,负责实时监测和调整电机电流,直接影响电机的响应速度和稳定性。
- PI 控制器在电流环中的应用
- PI 控制器通过比例环节快速响应电流偏差,积分环节消除稳态误差,实现电流的快速和准确控制。
- 尽管存在更复杂的控制策略,PI 控制器因其高性价比而广泛使用。
- 电机模型与电流内环结构
- 永磁同步电机的电压平衡方程是电流内环设计的基础。
- 电流内环系统结构包括 PI 调节器和两个小惯性环节,分别来源于调制模块和 DSP/STM32 等模块的占空比加载延迟。
- 开环系统特性分析
- 开环传递函数的分析有助于理解闭环系统的行为。
- 利用 MATLAB 的 Bode 图分析工具,可以直观地分析系统特性。
- PI 参数整定原理及参数计算
- 电流内环的设计要求在电机启动过程中能够以最大电流启动,并在外部扰动下快速恢复。
- 依据典型 I 型环节理论,可以通过开环增益 K K K 和惯性环节时间常数 T T T 来整定 PI 调节器参数。
- 开环参数直接影响闭环系统的行为,通过调整开环参数可以间接控制闭环系统的特性。
- 电流环调试方法及验证思路(Simulink)
- 通过 Simulink 环境验证理论,搭建电流环仿真模型,包括逆变器模块、PMSM、Clark 变换、Park 变换、PI 调节器和 SVPWM 模块。
- 仿真结果表明,整定后的电流环具有快速的响应速度和出色的抗扰动性能。
- 更换电机参数的快速设计参数及调试仿真
- 一个基于 MATLAB 的小工具,用户输入电机参数后,可以自动计算出新的 PI 控制参数。
- 通过更换电机参数并使用新计算的 PI 参数,仿真结果显示系统能够实现电流的快速跟踪,并具备良好的抗扰性能。
永磁同步电机 MTPA 与 id=0 的控制原理
LEODWL 已于 2022-07-19 21:32:55 修改
MTPA 控制方式与 id=0 控制方式的区别
永磁同步电动机主要可分为:表面式和内置式。在表贴式永磁同步电动机中,永磁体通常呈瓦片形,并位于转子铁心的外表面上,这种电机的重要特点是直、交轴的主电感相等 ( L d = L q L_d = L_q Ld=Lq),又称隐级式;而内置式永磁同步电机的永磁体位于转子内部,永磁体外表面与定子铁心内圆之间有铁磁物质制成的极靴,可以保护永磁体。这种永磁电机的重要特点是直、交轴的主电感不相等 ( L d ≠ L q L_d \neq L_q Ld=Lq) ,又称凸级式。
一般情况下,MTPA 与 id=0 控制是分别用于内嵌式和表贴式的电机的,其主要原因就是这两种电机的交直轴电感大小特点不同。

其中磁阻转矩:

永磁转矩:

当我们使用的是表贴式永磁同步电动机时 L d = L q L_d = L_q Ld=Lq,所以无论直轴电流 i d i_d id 为多少,磁阻转矩均为 0,那么此时磁阻转矩不做功,则此时的直轴电流没有任何作用,但他的存在是影响总电流 i s i_s is 的,出于提高电流利用率、系统的效率的目的,我们选取 i d = 0 i_d = 0 id=0,使得此时只有交轴电流做功,同时计算的变量也只有一个,即 i q i_q iq,简化了变量的控制复杂度。
那么对于内置式永磁同步电机,此时 L d ≠ L q L_d \neq L_q Ld=Lq , i d = 0 i_d = 0 id=0 的控制策略显然不适了,所以接下来引进了 MTPA(最大转矩电流比控制) 的控制策略,即使用最小的电流 i s i_s is,产生最大的转矩,这就要求我们找到转矩、交直轴电流三者之间的极限关系,从而方便模型的搭建与算法的实现。
1.2 推导过程
由上述已知的分析,我们可以得到以下方程组:

为了找到极值关系,在电流 i s i_s is 一定时,即电流幅值一定(不一定是恒转矩)利用数学中的拉格朗日定理,引入辅助函数。

接着开始拉格朗日求极值的过程,

对上式进行求解,得到了直轴电流 i d i_d id 和交轴电流 i q i_q iq 的关系,

其中式 5 的解需要舍去,因为常规电机( L d < L q L_d < L_q Ld<Lq)的 i d i_d id 为负。
将式 5 代入电磁转矩方程,式 1 可得电磁转矩与交轴分量的关系

在仿真中最关键的是转矩电流关系的实现,虽然有式 1 可以表示出二者之间的关系,但必须反解出以 i q i_q iq 为自变量来表示的函数关系。方程如下:

这个方程求解起来比较复杂,有文章提出采用描点查表法来解决这一问题,这种方法是可以用数学方法拟合出这条曲线的。

MTPA 的矢量控制框图
同步电机:永磁同步电机的电路分析
車馬炮
新能源领域攻城狮
1 电机电感模型
从电源的角度出发,永磁同步电机可以看做是三个线圈(绕组)末端连在一起的三相电路。每个线圈上都存在三类物理效应 [1]:
空载反电动势:永磁体随转子旋转时在线圈中感应的电压
电阻效应:绕组通入电流时两端产生与电流同相位的阻性电压降
电抗效应:绕组通入交流电流后,产生感性电压降
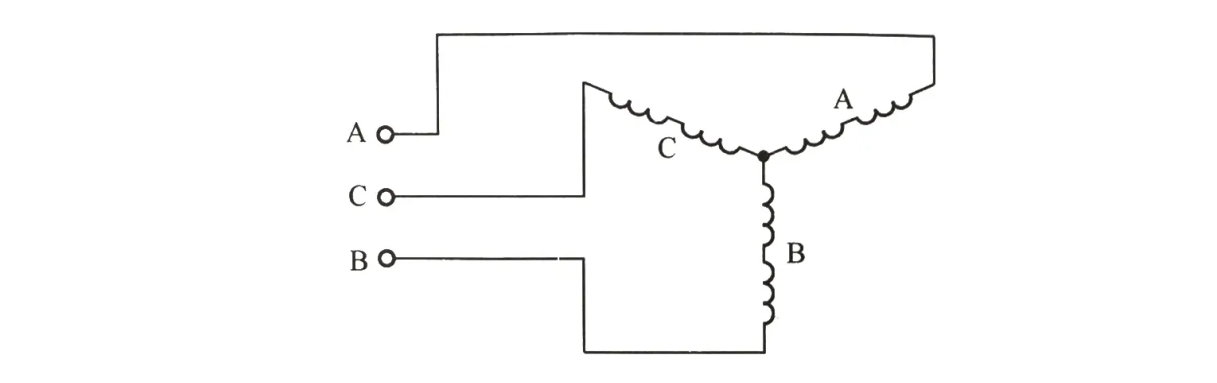
电机电路模型
因此可以得到如下的电路方程:
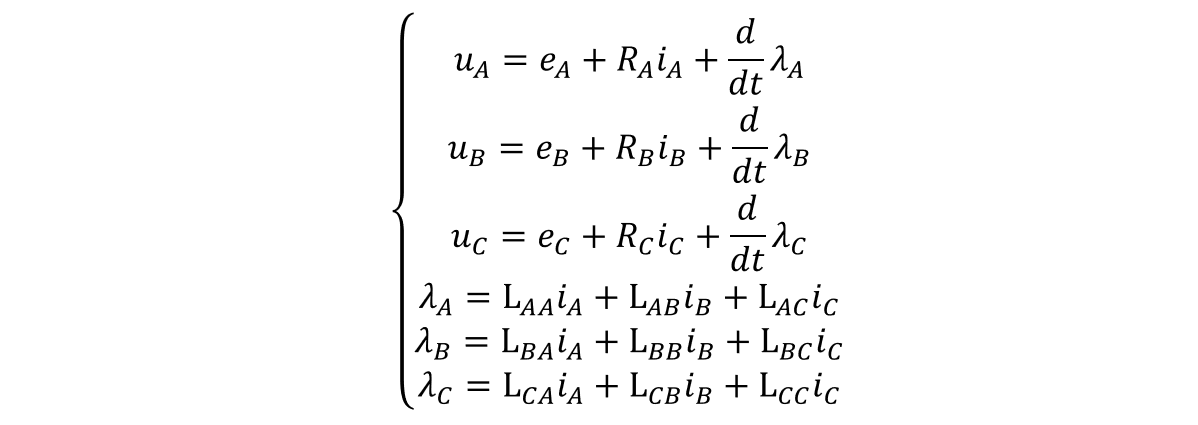
永磁同步电机电路方程
u A u_A uA 为线圈 A 的相电压; e A e_A eA 为线圈 A 的感应电动势; R A R_A RA 为线圈 A 的电阻; λ A \lambda_A λA 为线圈 A 的磁链 [2]
L A A L_{AA} LAA 为 A 相线圈自感, L A B = L B A L_{AB} = L_{BA} LAB=LBA 为 A 相 B 相线圈自感, L A C = L C A L_{AC} = L_{CA} LAC=LCA 为 A 相 C 相线圈自感 [3]。
磁路的定义 λ = L i = N ϕ \lambda = Li = N\phi λ=Li=Nϕ,其中 L L L 为电感, ϕ \phi ϕ 为线圈的磁通量, N N N 为线圈匝数。
2 电机相量模型
2.1 空载反电势相量
永磁同步电机的转子磁动势为永磁体产生:
永磁体磁动势 F p m = H C h p m F_{pm} = H_{C} h_{pm} Fpm=HChpm 式中, H C H_C HC 表示永磁体的 矫顽力[2], h p m h_{pm} hpm 为永磁体的厚度
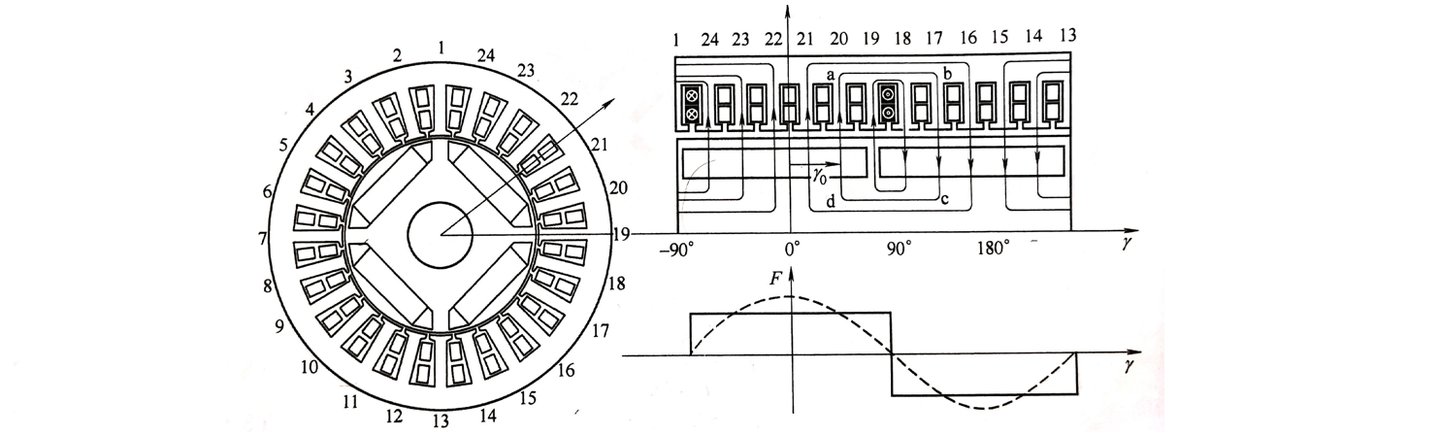
电机转子磁动势产生示意图
如上图所示,永磁体的磁动势表示为波函数: f r = f ( γ − θ r ) f_r = f(\gamma - \theta_r) fr=f(γ−θr) 式中, γ \gamma γ 表示空间位置, θ r \theta_r θr 表示转子位置角
另外,提取永磁体磁动势的 基波分量: f r 1 = F p m 1 cos ( γ − θ r ) f_{r1} = F_{pm1} \cos(\gamma - \theta_r) fr1=Fpm1cos(γ−θr) 式中, F p m 1 F_{pm1} Fpm1 为转子磁动势的基波幅值

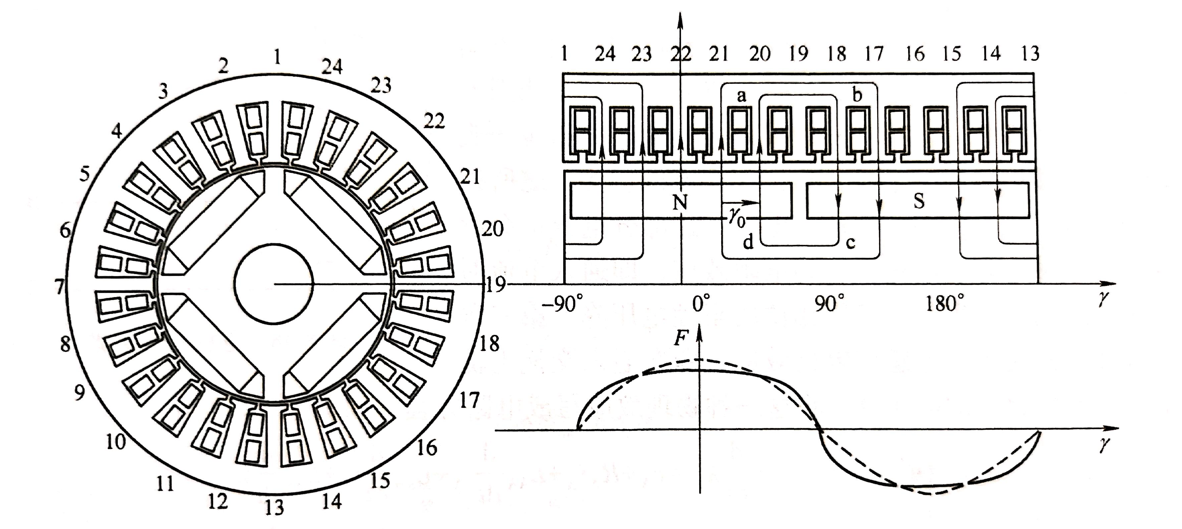
A 相磁链波形
A/B/C 三相绕组的轴线分别位于 γ \gamma γ 等于 0°、120° 和 240° 处。因此从 A 相磁链波形图中可以得知,转子再转过 θ 0 \theta_0 θ0 时,转子磁动势的波峰将对准 A 相绕组轴线,A 相绕组匝链的磁通量取得最大值;转子再转过 θ 0 + 180 ° \theta_0 + 180° θ0+180° 时,转子磁动势的波谷将对准 A 相绕组轴线,A 相绕组匝链的磁通量取得最小值。该值与最大值大小相等,方向相反。将波形进行谐波分解可以得到其基波分量(如图中虚线所示)。
三相定子绕组的磁动势基波分量可以通过下列方程式表示:

三相定子绕组的磁动势基波分量方程式
根据法拉第电磁感应定律,将磁链进行求导即可得到空载反电动势的表达式:
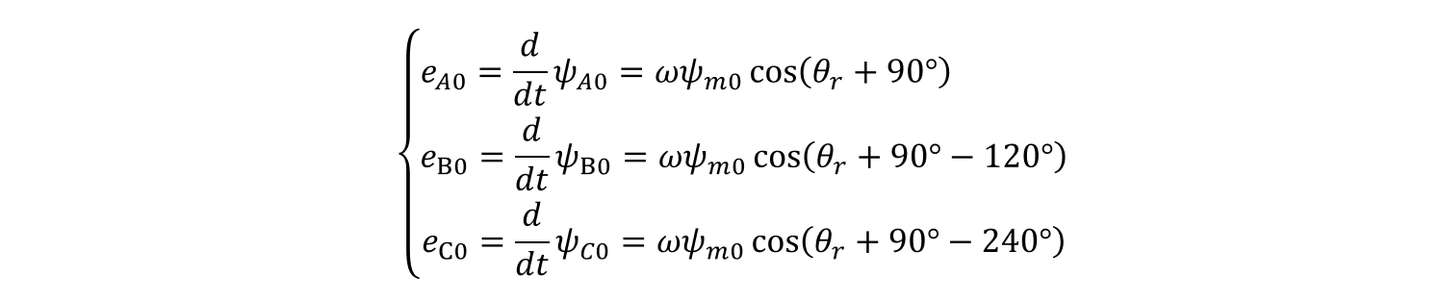
三相电子绕组的空载反电动势
将以上的磁动势与空载反电动势使用向量表示:

定子绕组磁动势与空载反电动势的相量表达式
2.2 直交轴电流相量
假设三相电机的定子绕组电流按照正弦波变化,则定子绕组产生的电动势 [2] 如下图所示。
电机定子绕组磁动势产生示意图
公式中 C C C 表示定子绕组相关的系数(考虑绕组的类型,比如短距、分布、斜槽等)。 f A f_A fA 表示线圈 A 产生的电动势在空间位置 γ \gamma γ 处的作用。
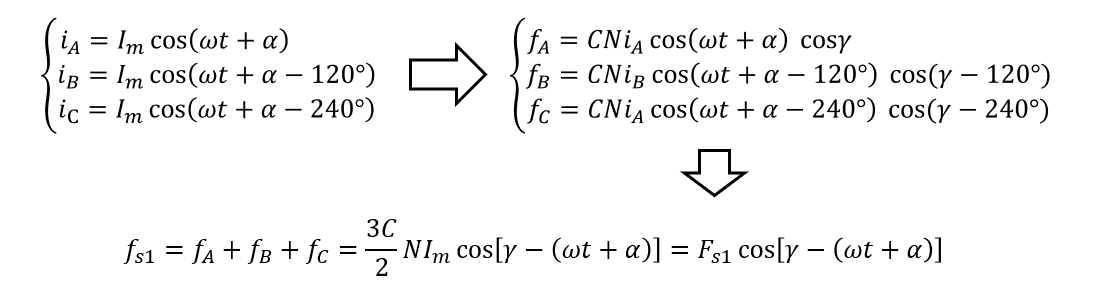
定子绕组电流 — 定子绕组电动势 — 定子绕组合成电动势
可以将定子绕组的合成电动势 f s 1 f_{s1} fs1 分解为直轴分量 f s d f_{sd} fsd 和交轴分量 f s q f_{sq} fsq:( Δ γ \Delta \gamma Δγ 为转矩角 [4])

定子绕组合成电动势分解

直轴分量与交轴分量磁动势(左:相量方程 右:时间函数)
将 A 相电流进行分解,得到 d / q d/q d/q 轴电流分量:

A 相定子绕组电流分解(左:时间函数 右:相量方程)
结合三相电流磁动势的合成( f s 1 = f A + f B + f C f_{s1} = f_A + f_B + f_C fs1=fA+fB+fC ),可以得到以下公式:

d / q d/q d/q 轴电流磁动势的合成
2.3 电枢反应反电势相量
三相电流中的 d d d 轴分量会产生直轴定子绕组磁动势 f s d f_{sd} fsd, q q q 轴分量会产生直轴定子绕组磁动势 f s q f_{sq} fsq。绕组在只有定子绕组磁动势作用下的匝链的磁链称作 电枢反应磁链[2],在只有直轴定子绕组磁动势作用下的匝链的磁链称作 直轴电枢反应磁链,在只有交轴定子绕组磁动势作用下的匝链的磁链称作 交轴电枢反应磁链。对于凸极式电机来说,直轴与交轴磁链的幅值 Λ d m \Lambda_{dm} Λdm 和 Λ q m \Lambda_{qm} Λqm 是不同的,这是因为直交轴磁动势所面对的转子磁阻不同。

A 相绕组直轴与交轴磁链
A 相绕组中磁链公式为:

A 相绕组磁链公式
使用相量形式可得以下公式:
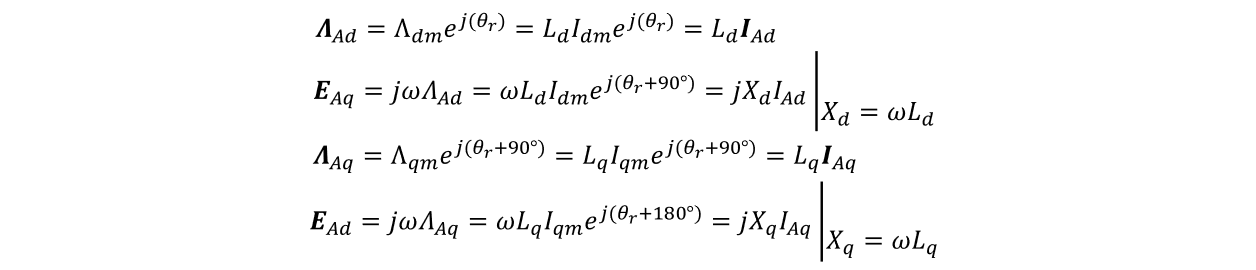
电枢反应反电动势相量
2.4 电机单相相量模型
使用相量方程来描述电机电感模型:(公式中所有相量都表达为 A 相,因此称为单相相量模型)

电机单相相量模型

电机单相量模型的时间函数形式
电机单相相量模型需要满足以下条件:
三相电流正弦且对称
单相绕组平衡
永磁磁链正弦
电枢反应磁链正弦
电机工作在稳态
当永磁同步电机的转子为隐极式时, X d = X q = X s X_d = X_q = X_s Xd=Xq=Xs,则公式可以简化:

隐极式转子电机的单相量模型
我们将 A 相电压定义为直交轴分量:

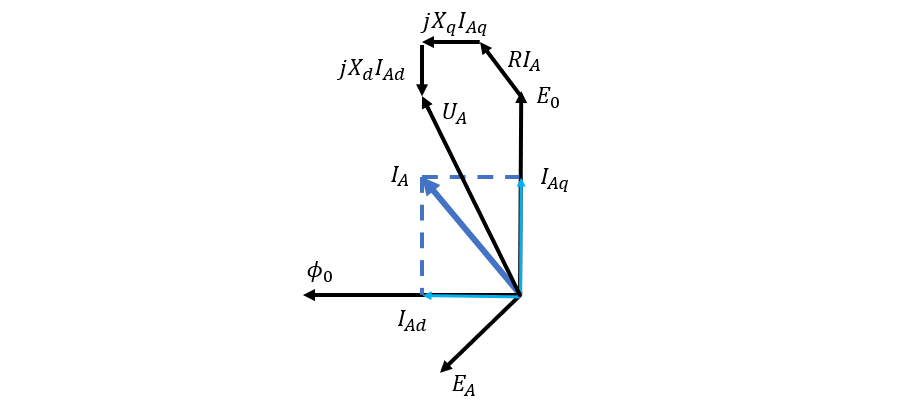
相量图
基于 A 相电压相量图可以得到如下公式:

考虑到三相对称,可以用单相标准三相系统:

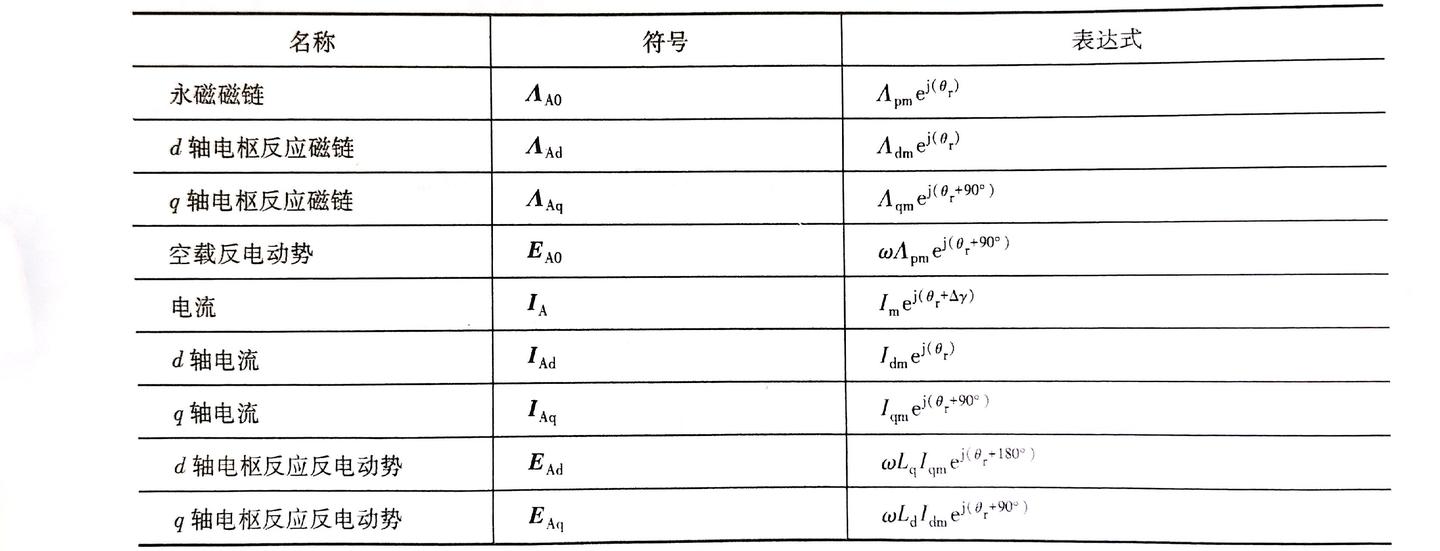
相量汇总表
3 电机转矩模型
根据能量守恒推导出电机转矩,推导过程中忽略了电阻项且近似认为系统的效率为 1:
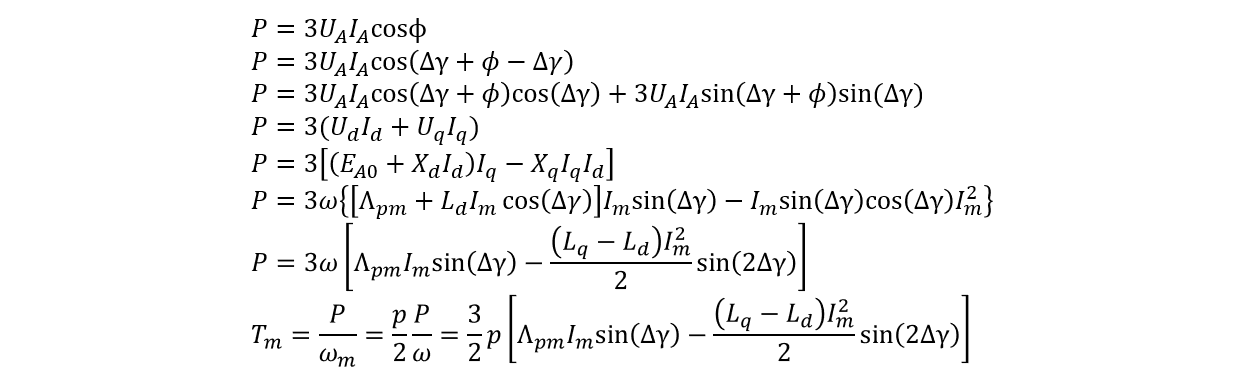
电机转矩推导
转矩由两部分构成:第一部分只和永磁磁链有关,称为永磁转矩;第二部分与永磁无关,只和直交轴的电感差值(即和直交轴磁阻差值)有关,称为磁阻转矩。永磁转矩在转矩角等于 90° 时取得最大值,而磁阻转矩在转矩角为 45° 和 135° 时取得最大值。总转矩最大值的转矩角则与电机参数有关。
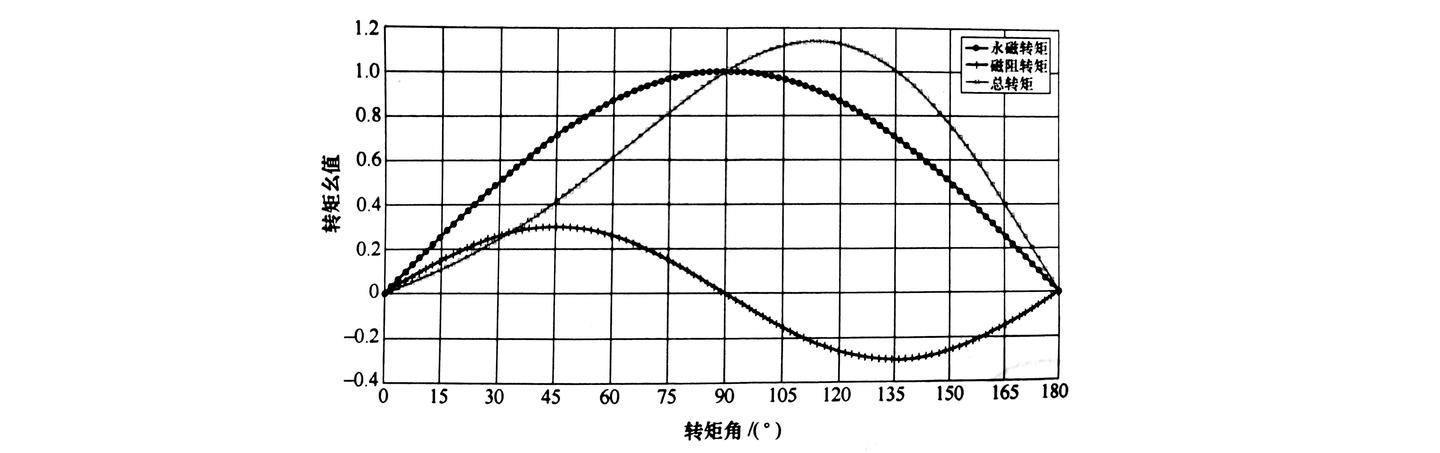
转矩特性曲线
对于隐极电机来说,由于直轴和交轴电感相同,因此只有永磁转矩:

隐极电机的转矩方程
参考
《车用电机原理及应用》 袁新枚
abcd 电机学笔记 - 磁路和磁性材料 https://zhuanlan.zhihu.com/p/481709743
转矩角:电流相量和永磁磁链相量的夹角
发布于 2022-04-06 22:57
其他相关基础知识
直流无刷电机
Shakspark 发表于 2012-07-18 22:40:30
詹姆斯艾伦
下图是无刷电机的转子结构。
在这个转子内侧,有两个永久性磁铁,一个是 N 极,一个是 S 极。这种结构属于外转子型的无刷电机,即电机的转子在外面,而定子在内部。如下图所示:
电机的定子结构是线圈,也就是电磁铁。定子在内部是固定不动的,那么,大家来想一下,如何才能让这个电机转起来呢?
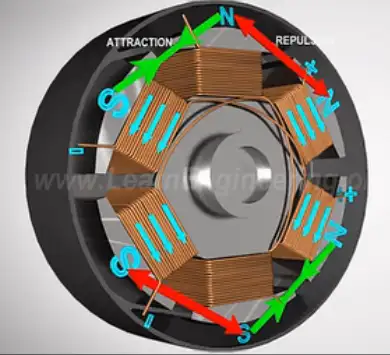
其实这个很容易想到,利用磁铁异性相吸的原理,如果我给定子线圈通电如下所示,会发生什么情况呢?
很显然,外面的转子由于异性相吸的原理会逆时针转动,让自己的 N 极靠近定子电磁铁的 S 极,自己的 S 极靠近定子的 N 极。很简单吧。看他们慢慢的靠近了。
如果两个磁极靠近了怎么办呢?还能继续转动吗?显然他们不想继续转动了。不过我们有办法。
我们让下一个线圈通电,刚才这个线圈不通电,即上图中标 B 的线圈通电流。这样永磁铁就开始继续赶路追寻下一个目标了。如下图所示。
这个过程就好比你拿了一个胡萝卜去勾引一头驴,你的胡萝卜和驴以同样的速度在运动,蠢驴永远也追不上胡萝卜,但是蠢驴终归是蠢驴,它会一直追下去。
就这样,无刷电机就转起来了,这当然是无刷电机最简单、最基本的运行原理而已。它是有明显的缺点的,它转动的时候会抖动,一会快一会儿慢,就像这头奔跑的蠢驴一样,它看见胡萝卜就跑,看不见的时候就不想跑,快追上胡萝卜的时候跑得快,离胡萝卜远的时候跑得慢,怎么办呢?干脆在给这个驴后面放个鞭子,拿鞭子打它让他赶紧的跑。于是乎就有了这样的电机,如下图所示。
在上图中,前面一个电磁铁线圈在勾引永磁铁,后面一个电磁铁线圈在推动永磁铁。就好像一头驴,前面有吃的东西,后面有鞭子,你说它跑还是不跑呢?
这样这头蠢驴就开始卖力的马不停蹄的奔跑了。
有人说,哦,原来无刷电机这么简单啊?No,No,No,这里面的关键技术是你怎样让内部的定子线圈产生在合适的时间产生合适的电流?这简单吗?其实没有电力电子技术的支持一点也不简单啊。
有同学又问了,定子线圈怎么知道什么时候通什么电流,怎么知道驴什么时候追上来了,什么时候移动胡萝卜?
其实我们在无刷电机里面安装了霍尔传感器,霍尔传感器能够感受转子永磁铁的位置,也就是驴的位置,它能够及时的把驴的位置报告给定子线圈控制器,控制器根据这个信息来控制定子内部的线圈电流流向。就这样无刷电机就转起来了。
我们可以看到,无刷电机的定子线圈内部的电流其实也在不停的改变方向,所以其实是交流电,但是我们说的是无刷直流电机啊,是的,我们用的是直流电源啊,直流电源通过无刷电机的驱动器变成了交流电,这个过程其实是无刷电机的比较核心的技术。
普通直流电机线圈内部也是流通的交流电,但是普通电机是通过电刷和换向器的合作把直流电变成了交流电,电刷这个装置像一个刷子一样一直在摩擦,使得普通直流电机结构复杂,使用寿命不够长,而无刷电机用的是电力电子技术实现了电流的逆变(直流变交流),没有了电刷这个结构,所以叫做 无刷电机。是一种技术的进步。
上个图。
怕不怕?不怕你给大家讲讲吧!我先讲到这里吧。
短距和分布绕组如何实现削弱高次谐波?
詹姆斯艾伦
一般的三相异步电动机定子绕组都使用的是短距分布绕组,所以我们看到的真实的定子绕组结构一般是这样的,比较复杂的。
而我们在讲交流电机的物理模型的时候却是非常简单的模型,如下图所示:
这种简单的物理模型,给我们一种错觉,电机无非如此啊,三相对称交流电产生旋转磁动势,带动转子进行旋转,好像特别的简单,很多学生在老师讲到异步电机的原理的时候觉得很简单,兴趣也很浓厚。
但是随着抛开原理,讲真实的电机的时候许多同学就开始懵了。是的,电机的工作原理就是这么简单,但是简单的物理模型不一定能造出好用的电机,要想造出性能优良的电机就必须不断的去改进电机结构,优化电机性能,采用短距和分布绕组就是,能够大量削弱高次谐波,却对基波削弱较少,对提高电机运行性能非常有利,代价就是电机结构更加复杂了,理论分析更加深入了,给同学们的学习带来困难了,让人学起来特别的费劲。
那么到底如何削弱高次谐波呢?
首先我们来看一个最简单的集中整距绕组的磁动势。
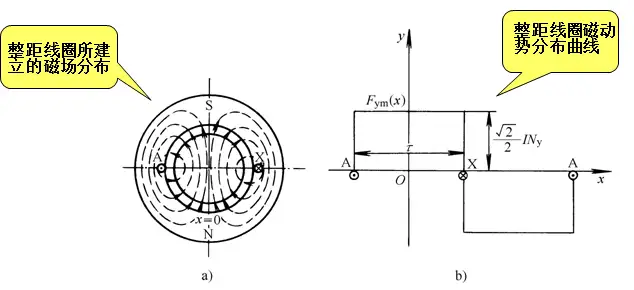
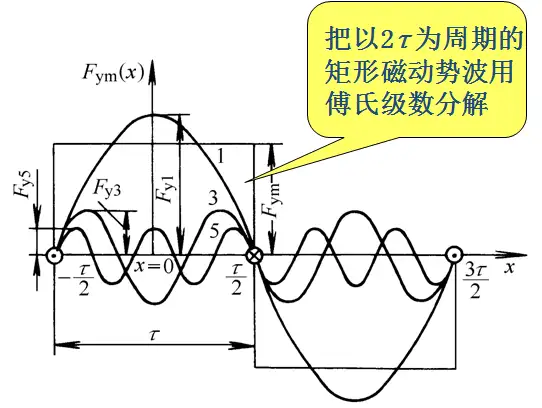
这种磁动势很简单,就是简单的矩形波,而且随着电流的改变矩形波在振动,叫做脉振磁动势。这种磁动势看起来简单,线圈结构设计起来也简单,但是用起来却没有那么的好,因为矩形波是含有大量高次谐波的!如果对矩形波进行傅立叶分解可以得到这样的波形,如下图所示,还是有比较多的三次谐波和五次谐波。这对电机运行是不好的,电机性能不够优秀。

这么多的谐波,必须进行削弱,想办法吧!工程师办法多,于是他们想到了采用分布绕组!分布绕组就是把一个本来的线圈分成线圈组,简单的说就是把集中在一起的线圈拆分成几个,然后分别放到不同的槽里面。如下图所示。
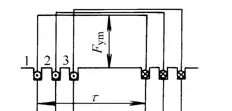
上图中其实是把一个集中线圈拆分成了三个线圈组,分别放在了六个槽中。这样每个线圈就会各自产生磁动势,而且它们各自的磁动势之间还会有相位差,如果把把他们产生的磁动势基波给分别画出来大概是这样子的。
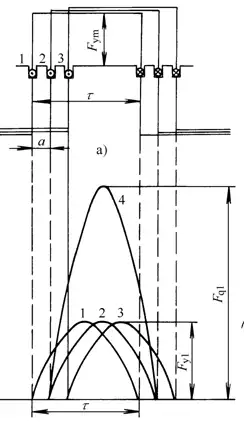
这三个正弦波可以叠加在一起,可以用把他们看成相量进行叠加,由于他们之间有相位差,叠加起来以后肯定比三个重合在一起叠加起来的值要小。也就是分布绕组削弱了磁动势。
其实电机工程师并不希望磁动势被削弱的!通过数学分析和计算,工程师发现采用这种分布绕组对不同次谐波的削弱程度是不一样的,削弱程度可以用分布因数来表示,分布因数的表达式为:
通过计算可知,谐波次数越高,就削弱的越严重。工程师发现采用分布绕组对基波的削弱大概是 0.96,而对三次、五次谐波的削弱可以达到 0.2 甚至 0.1,这是非常棒的效果,削弱一点点基波,却能削弱那么多的谐波,值了!于是工程师愉快的采用了分布绕组。
我们对产品的性能要求是没有最好,只有更好的!我们希望谐波进一步的减小,怎么办?工程师发现如果采用短距绕组的话也能够削弱谐波。
计算,分析过程与分布绕组类似,此处就不赘述了,采取短距绕组已后也能够削弱高次谐波,对基波削弱的并不是太多!通过短距绕组来削弱谐波分量,对谐波又打了一个折扣,这个折扣起名叫节距因数。
然后我们就采取两种方式共同来削减谐波的办法,采取分布短距绕组,这样谐波就会被削弱两次,打两个折扣,打的这个折扣起名叫做绕组因数,绕组因数等于节距因数乘以分布因数。
经过两个短距和分布绕组的处理,磁动势的高次谐波已经被削减的非常严重了,这意味着什么呢?这意味着我们开头讲的集中绕组产生的那个矩形波现在已经非常接近一个标准的正弦波了!这就是采用短距和分布绕组的功劳!
异步电机和同步电机中的「异步」与「同步」
詹姆斯艾伦
交流电机主要分为同步电机和异步电机。
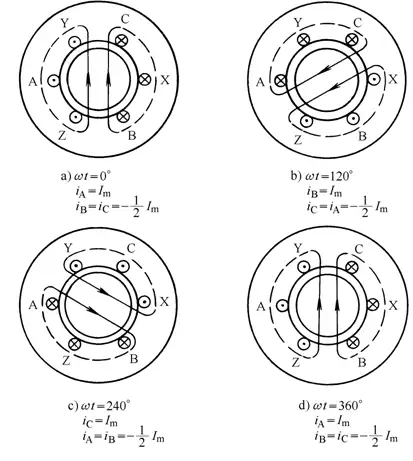
首先来说一下什么是同步转速:电机外壳是定子,定子绕组上通入三相对称交流电,三相对称交流电就会在定子上产生磁场,定子上有三相对称交流电,而且有对称绕组,形成磁场比较复杂,不过,它们的合成磁场却是一个旋转的磁场,你可以简单的认为这个三相对称交流系统形成了一个看不见摸不着的旋转磁场,这个旋转磁场绕着定子圆周旋转,旋转的速度叫做同步转速。

这是三相对称的定子绕组,通上三相对称交流电,形成旋转磁场的物理模型
但真实的异步电动机转子是这样的,这就是异步电动机的定子,里面画的那三根线代表旋转磁场的磁力线,这个磁场随着电流的变化在不停以同步转速进行旋转。
这个同步转速 n n n 是比较固定的,和交流电的频率 f f f 以及绕组的极对数 p p p 有关系,关系式为 n = 60 f p n = \frac{60f}{p} n=p60f。因为我们国家的电网频率是 50Hz,所以根据极对数 p p p 的不同,同步转速一般是 3000 转每分钟、1500 转每分钟、1000 转每分钟、750 转每分钟等等。
好,现在我们明白了,定子绕组虽然安安静静的在那里不动,但是因为它通入了变化的交流电,所以它产生了以同步速度旋转的磁场。
如果是异步电动机的话,转子结构很简单,就是闭合线圈,最简单的鼠笼式异步电机就是这个样子的,所以异步电机转子结构简单、价格便宜、维护方便、运行可靠,得到了广泛的应用啊!

鼠笼式异步电动机结构,像一个鼠笼子一样,其实就是一些铝条导体组成的闭合线圈
把这样一个闭合线圈放入定子内部,定子的旋转磁场必然会在转子线圈上产生感应电动势,进而产生感应电流,最后产生转子磁场,这样异步电动机的转子就变成了一个电磁铁,这个电磁铁必然会跟随定子旋转磁场进行旋转。
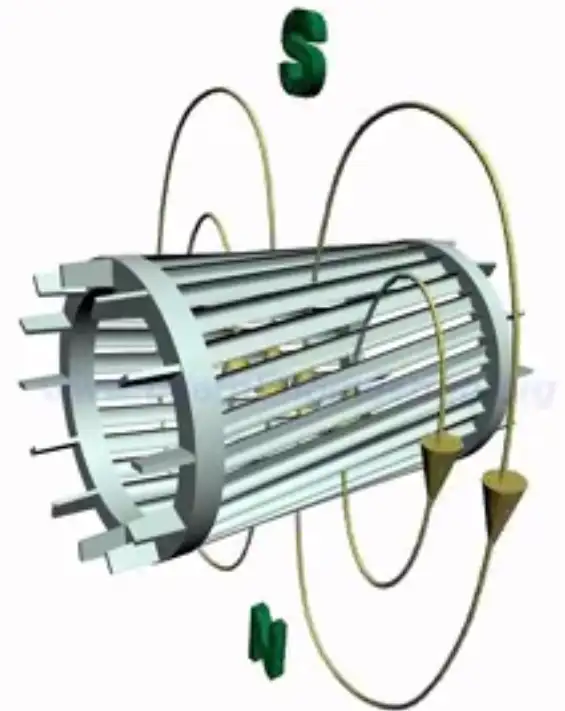
看看定子磁场是如何切割转子绕组线圈的
在异步电动机中,把转子旋转的速度叫异步转速,由于转子内部的电动势和电流都是通过切割定子旋转磁场得来的感应电动势和感应电流,所以异步电机还有一个名字叫感应电机。

异步电动机一般就长这个样子,你应该见过吧,很常见的一种电动机,又叫马达。
既然你是靠切割磁感线感应得来的电动势,那你要想存在电动势,你就必须不停的切割磁感线才行,您说是不是这个道理,所以,转子旋转的速度就不能和定子旋转磁场的速度相等,如果相等了他们两个相对静止了转子就不切割定子磁场了,转子就没有感应电动势了,你明白了吗?所以转子的异步转速永远也不能等于定子旋转磁场的同步转速,即异步转速小于同步转速,于是我们把他叫做异步电机。
由于同步转速的速度比较固定,所以异步转速也比较固定,比如 3000 转每分钟的同步转速的话对应的异步转速就是 2900 + 转每分钟,根据所带负载的不同转速会不同,空载时转速最快,接近于同步转速,负载时转速下降。也就是异步转速虽然低于同步转速,但是差距不会太大。
如果我们要想让转子的转速和定子旋转磁场的速度同步,也就是让转子转速等于同步转速,我们就需要想办法把转子本身变成一个电磁铁,而不能依靠人家定子旋转磁场来感应,怎么办呢?其实很简单,给你的转子专门接一个直流电源,这个直流电源就可以把转子变成一个电磁铁,这样转子就可以自立门户了,转子不再需要非得切割定子磁场来产生电动势和电流了,这个时候转子就会以同步速度跟随定子旋转磁场进行旋转,这样的电机就叫同步电机。
很明显同步电机的转子结构要比异步电机复杂很多,所以同步电动机价格高,结构复杂,在生产生活中并没有异步电机应用的那么广泛,但是同步电机的主要应用是在发电机上,现在的火电站、水电站的汽轮机和水轮机基本上都是同步发电机。

你应该见过这种小型的柴油发电机,其实就是用柴油发动机为原动机带动同步发电机工作的。
至于水电站和火电站的那种大型同步发电机感兴趣的话可以自己搜索一下图片看看。
via:
永磁同步电机–结构_定子齿部和轭部指哪-CSDN博客
https://blog.csdn.net/weixin_40297883/article/details/127591719永磁同步电机(PMSM)的转子结构剖析_永磁电机转子结构-CSDN博客
https://blog.csdn.net/weixin_42164589/article/details/95309509永磁电机结构分析:别再看书上抽象的二维结构图了,三维立体一目了然就能看清楚_永磁同步电机结构图-CSDN博客
https://blog.csdn.net/weixin_42164589/article/details/121392494手把手系列第一篇:基础电机本体理论——永磁同步电机的分类与结构-CSDN博客
https://blog.csdn.net/sy243772901/article/details/143398877手把手学电控系列第二篇:FOC 控制理论——从根源上解释电流环PI参数如何设计_运动控制系统陈伯时-CSDN博客
https://blog.csdn.net/sy243772901/article/details/143486257永磁同步电机 MTPA 与 id=0 的控制原理-CSDN博客
https://blog.csdn.net/qq_39397153/article/details/109705341电机学笔记—同步电机7:永磁同步电机的电路分析 - 知乎
https://zhuanlan.zhihu.com/p/493348580
—直流电机和交流电机的原理和区别是什么? - 知乎
https://www.zhihu.com/question/24086069/answer/127455777直流无刷电机是什么?在机器人、电动汽车、航模/无人机等方面有何应用? - 知乎
https://www.zhihu.com/question/20363326/answer/130521670短距和分布绕组如何实现削弱高次谐波? - 知乎
https://www.zhihu.com/question/26188179/answer/249960292异步电机和同步电机中的「异步」与「同步」指的是什么? - 知乎
https://www.zhihu.com/question/20634476/answer/134124070