
1.HC-SR04介绍
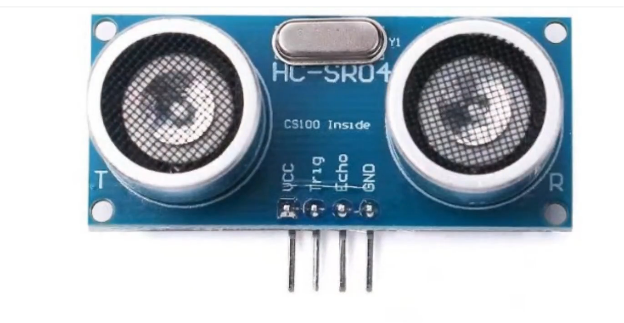
超声波传感器有很多种类的型号:HC-SR04、UC-025、UC-026、UC-015、US-100等等,但是他们都大同小异。他们的主要区别是工作参数有点不一样,像是工作的电压或者温度,探测距离或精度有点差别。引脚是一样的,都是4个引脚(us-100多了一个GND引脚),引脚的工作和作用也是一样的。
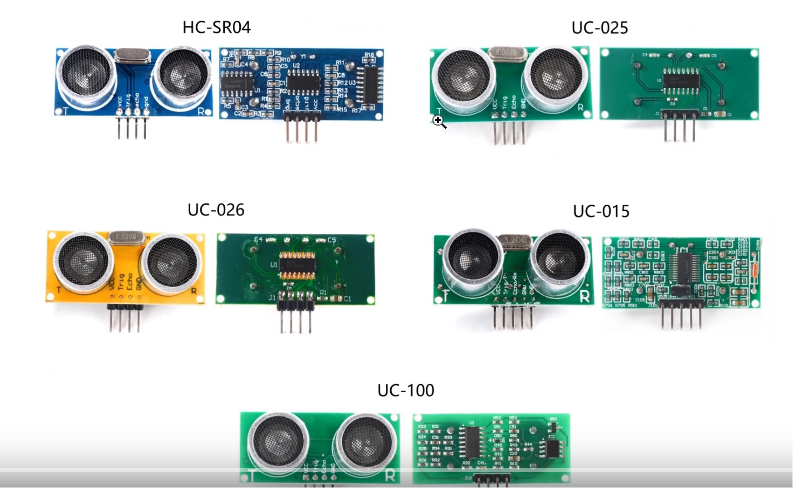
其中我们最常用的为
接线如下:
HC-SR04 |
STM32 |
备注 |
|---|---|---|
VCC |
3.3V/5V |
外接直流电源 |
Trig |
任意一个GPIO口 |
输入端 |
| ECHO | 任意一个GPIO口 |
输出端 |
GND |
GND |
接地 |
2.HC-SR04原理介绍
2.1原理概述
超声波测距的工作原理其实很简单,传感器发送超声波,超声波碰到障碍物反弹回来,被传感器接收到。芯片算出发送和接收的时间间隔,再利用公式:s=vxt,看下面示意图,所以实际距离=测量距离/2= 速度 x时间/2。
顺便一提,超声波在空气中的传播速度大概是 343m/,传播速度受到环境条件的影响,如温度、湿度和气压等
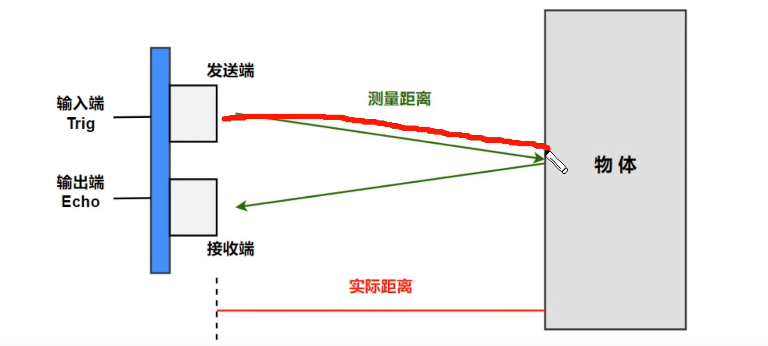
超声波模块有两个超声波探头,一个是发送端,负责发送超声波,一个是接受端,负责接收超声波。
3.2原理详解
接下来我们用时序图的方式来介绍超声波发送和接收的过程以及如何计算距离的。
- 正常测距时的时序:
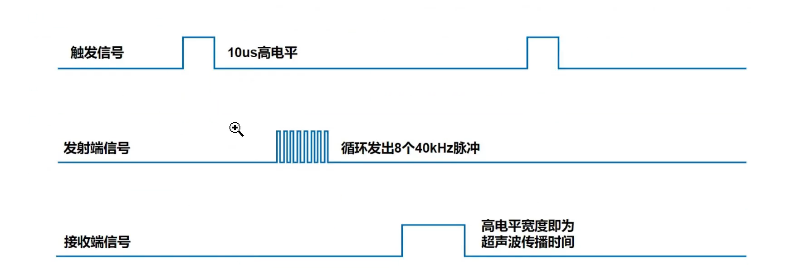
- 单片机会给超声波模块发送大于
10us的高电平的触发信号; - 超声波模块接收到触发信号后
Trig端发送8个40KHz的超声波脉冲。 - Echo端由低电平转为高电平,并同时开始发送超声波。
- 超声波模块接收到返回信号后,
Echo端由高电平转为低电平。 - Echo的高电平宽度即为超声波发出的时间。
4驱动代码编写
明白了超声波测距的原理,我们知道了超声波测距的重点是测量超声波在空气中的时间。接下来我们来写超声波传感器的驱动代码。
4.1写前思考
我们计算差超声波往返所需时间,然后乘于超声波的速度,计算出距离,所以我们需要一个类似于秒表的东西,来测我们的时间。
所以我们可以先用定时器来做一个以微妙为单位的计时。为了方便使用,我们再封装若干个使用函数以便于我们使用这个定时器。
程序如下:
// TIM2 初始化句柄
TIM_HandleTypeDef tim2_handle;
/**
* @brief TIM2 定时器初始化函数
* 设置定时器基本参数,并调用 HAL 库进行初始化
*/
void tim2_init(void)
{
// 指定定时器实例为 TIM2(即使用 TIM2 作为定时器)
tim2_handle.Instance = TIM2;
// 设置分频器:72-1 = 71
// 如果主频为 72MHz,那么定时器时钟频率为 72MHz / 72 = 1MHz
// 即定时器每计数一次所需时间为 1 微秒
tim2_handle.Init.Prescaler = 72 - 1;
// 设置自动重装载值(ARR):65536-1 = 65535
// 当定时器计数到 65535 后溢出,重新从 0 开始
// 若计数频率为 1MHz,则溢出周期为 65536 微秒(即 65.536 毫秒)
tim2_handle.Init.Period = 65536 - 1;
// 向上计数模式(从0计数到ARR)
tim2_handle.Init.CounterMode = TIM_COUNTERMODE_UP;
// 关闭自动重装载寄存器的预装载功能
tim2_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
// 调用 HAL 库函数初始化定时器 TIM2
HAL_TIM_Base_Init(&tim2_handle);
}
/**
* @brief TIM2 的 MSP(MCU Support Package)初始化函数
* 一般用于配置定时器的时钟及中断
* @param htim TIM句柄指针
*/
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
// 判断当前初始化的是不是 TIM2
if(htim->Instance == TIM2)
{
// 使能 TIM2 定时器时钟
__HAL_RCC_TIM2_CLK_ENABLE();
}
}
/**
* @brief 启动 TIM2 定时器
*/
void tim2_start(void)
{
// 启动基础定时器,不带中断
HAL_TIM_Base_Start(&tim2_handle);
}
/**
* @brief 停止 TIM2 定时器
*/
void tim2_stop(void)
{
// 停止基础定时器
HAL_TIM_Base_Stop(&tim2_handle);
}
/**
* @brief 获取当前 TIM2 定时器计数器的值
* @return 当前计数器的值(0~65535)
*/
uint16_t tim2_get_cnt(void)
{
// 使用 HAL 宏获取定时器当前计数器值
return __HAL_TIM_GetCounter(&tim2_handle);
}
/**
* @brief 设置 TIM2 定时器计数器的值
* @param val 要设置的计数器值
*/
void tim2_set_cnt(uint16_t val)
{
// 使用 HAL 宏设置定时器的当前计数器值
__HAL_TIM_SetCounter(&tim2_handle, val);
}
4.2硬件连线
| HC-SR04 | C8T6 |
|---|---|
| VCC | VCC |
| GND | GND |
| Trig | PB6 |
| echo | PB7 |
因为我们涉及到对个别引脚的使用,所以我们需要对引脚进行一些简单的配置(为了方便对引脚进行修改,我们对引脚进行了一些简单的宏定义):
hcsrc04.h:
#define TRIG_PORT GPIOB
#define TRIG_PIN GPIO_PIN_6
#define TRIG_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define TRIG_HIGH() HAL_GPIO_WritePin(TRIG_PORT,TRIG_PIN,GPIO_PIN_SET)
#define TRIG_LOW() HAL_GPIO_WritePin(TRIG_PORT,TRIG_PIN,GPIO_PIN_RESET)
#define ECHO_PORT GPIOB
#define ECHO_PIN GPIO_PIN_7
#define ECHO_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define ECHO_STATUS() HAL_GPIO_ReadPin(ECHO_PORT,ECHO_PIN)
hcsrc04.c
/**
* @brief 初始化 HC-SR04 超声波模块所使用的 GPIO 引脚
* Trig 为输出模式,用于发出超声波脉冲
* Echo 为输入模式,用于接收返回的超声波信号
*/
void hcsr04_gpio_init(void)
{
// 定义 GPIO 初始化结构体,用于配置引脚属性
GPIO_InitTypeDef gpio_initstruct;
// 使能 Trig 引脚所在 GPIO 端口的时钟
TRIG_GPIO_CLK_ENABLE();
// 使能 Echo 引脚所在 GPIO 端口的时钟
ECHO_GPIO_CLK_ENABLE();
/*************** 配置 Trig 引脚 ***************/
// 设置 Trig 引脚号(例如 GPIO_PIN_1)
gpio_initstruct.Pin = TRIG_PIN;
// 设置为推挽输出模式(用于产生控制信号)
gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP;
// 上拉电阻(防止悬空引起不稳定)
gpio_initstruct.Pull = GPIO_PULLUP;
// 设置 IO 速度为中速(可根据需要选择低、中、高)
gpio_initstruct.Speed = GPIO_SPEED_MEDIUM;
// 初始化 Trig 引脚所在端口
HAL_GPIO_Init(TRIG_PORT, &gpio_initstruct);
/*************** 配置 Echo 引脚 ***************/
// 设置 Echo 引脚号(例如 GPIO_PIN_2)
gpio_initstruct.Pin = ECHO_PIN;
// 设置为输入模式(用于接收超声波返回信号)
gpio_initstruct.Mode = GPIO_MODE_INPUT;
// Echo 通常不需要特别配置上拉/下拉,默认即可(如需设置可加上)
// gpio_initstruct.Pull = GPIO_NOPULL;
// 初始化 Echo 引脚所在端口
HAL_GPIO_Init(ECHO_PORT, &gpio_initstruct);
}
为了方便我们使用,我们也需要封装一个函数,这个函数名我们定义为:hcsr04_get_length,相信大家通过这个函数名就可以知道这个函数的作用,在前文中,我们介绍了超声波是如何发出的,四个 引脚的作用有什么不同。简单梳理一下:
- 单片机给
Trig引脚至少10us长的一个高电平。 ECHO引脚从低电平到高电平,表示开始发送波;波发出的那一刻,开启软件定时器(开始计时)。ECHO引脚,由高电平转为低电平,表示波回来了,此时我们停止计时器,计算经过时长。- 获取经过的时间,并根据计算公式算出距离。
基于此,我们写出:
/**
* @brief 获取 HC-SR04 超声波测距模块测得的距离(单位:厘米)
* @return 距离值(cm)
*/
float hcsr04_get_length(void)
{
// 用于保存 Echo 信号持续的时间(单位:微秒)
uint16_t totol_time = 0;
// 用于保存最终计算出的距离值(单位:厘米)
float distance = 0;
/*************** 第1步:发送Trig脉冲 ***************/
// 给 Trig 引脚发送一个 10 微秒以上的高电平脉冲,触发超声波发射
TRIG_HIGH(); // 设置 Trig 引脚为高电平
delay_us(15); // 延迟至少 10us,这里用 15us 更加保险
TRIG_LOW(); // 设置 Trig 引脚为低电平,发送完成
/*************** 第2步:等待 Echo 信号拉高(开始接收) ***************/
// 当 Echo 引脚由低电平变为高电平时,表示超声波已经发射出去
// 此时开始计时
while(ECHO_STATUS() == GPIO_PIN_RESET); // 等待 Echo 变为高电平
tim2_start(); // 启动定时器
tim2_set_cnt(0); // 将定时器计数清零
/*************** 第3步:等待 Echo 信号拉低(接收到回波) ***************/
// 当 Echo 引脚由高电平变为低电平时,表示回波已经接收完成
// 此时停止计时
while(ECHO_STATUS() == GPIO_PIN_SET); // 等待 Echo 变为低电平
tim2_stop(); // 停止定时器
/*************** 第4步:获取 Echo 高电平持续时间 ***************/
// 获取定时器计数值(单位是 us,取决于定时器配置)
totol_time = tim2_get_cnt();
/*************** 第5步:根据声速计算距离 ***************/
// 声速约为 34300 cm/s,即 0.0343 cm/us
// 因为往返距离,所以除以 2
// distance = (totol_time × 0.0343) / 2 ≈ totol_time * 0.01715
distance = totol_time * 0.01715f;
// 返回测得的距离(单位:cm)
return distance;
}
5.总结
本文章中,我们介绍了超声波传感器的原理,并以其中较为经典的 HC-SR04为例,给出了驱动代码。现将完整代码粘贴如下:
hcsr04.h
#ifndef __HCSR04_H__
#define __HCSR04_H__
#define TRIG_PORT GPIOB
#define TRIG_PIN GPIO_PIN_6
#define TRIG_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define TRIG_HIGH() HAL_GPIO_WritePin(TRIG_PORT,TRIG_PIN,GPIO_PIN_SET)
#define TRIG_LOW() HAL_GPIO_WritePin(TRIG_PORT,TRIG_PIN,GPIO_PIN_RESET)
#define ECHO_PORT GPIOB
#define ECHO_PIN GPIO_PIN_7
#define ECHO_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define ECHO_STATUS() HAL_GPIO_ReadPin(ECHO_PORT,ECHO_PIN)
void hcsr04_init(void);
float hcsr04_get_length(void);
#endif
hcsr04.c
#include "hcsr04.h"
#include "sys.h"
#include "delay.h"
TIM_HandleTypeDef tim2_handle = {0};
//定时器初始化函数
void tim2_init(void)
{
tim2_handle.Instance = TIM2;
tim2_handle.Init.Prescaler = 72-1;
tim2_handle.Init.Period = 65536-1;
tim2_handle.Init.CounterMode = TIM_COUNTERMODE_UP;
tim2_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_Base_Init(&tim2_handle);
}
//msp函数
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2)
{
__HAL_RCC_TIM2_CLK_ENABLE();
}
}
void tim2_start(void)
{
HAL_TIM_Base_Start(&tim2_handle);
}
void tim2_stop(void)
{
HAL_TIM_Base_Stop(&tim2_handle);
}
uint16_t tim2_get_cnt(void)
{
return __HAL_TIM_GetCounter(&tim2_handle);
}
void tim2_set_cnt(uint16_t val)
{
__HAL_TIM_SetCounter(&tim2_handle,val);
}
/******************************************************** */
/*初始化超声波传感器*/
void hcsr04_gpio_init(void)
{
GPIO_InitTypeDef gpio_initstruct;
//打开时钟
TRIG_GPIO_CLK_ENABLE();
ECHO_GPIO_CLK_ENABLE();
gpio_initstruct.Pin=TRIG_PIN;
gpio_initstruct.Mode=GPIO_MODE_OUTPUT_PP;
gpio_initstruct.Pull=GPIO_PULLUP;
gpio_initstruct.Speed=GPIO_SPEED_MEDIUM;
HAL_GPIO_Init(TRIG_PORT,&gpio_initstruct);
gpio_initstruct.Pin=ECHO_PIN;
gpio_initstruct.Mode=GPIO_MODE_INPUT;
HAL_GPIO_Init(ECHO_PORT,&gpio_initstruct);
}
void hcsr04_init(void)
{
tim2_init();
hcsr04_gpio_init();
}
float hcsr04_get_length(void)
{
uint16_t totol_time=0;
float distance=0;
//1Trig引脚,给Trig引脚至少10us的高电平
TRIG_HIGH();
delay_us(15);
TRIG_LOW();
//2ECHO引脚,由低电平跳转到高电平,表示开始发送波,波发出去的那一下,开启定时器
while(ECHO_STATUS()==GPIO_PIN_RESET);
tim2_start();
tim2_set_cnt(0);
//3ECHO,由高电平条转低电平,表示波回来了,波回来的那一下,我们开始停止定时器,计算出中间经过
//多长时间
while(ECHO_STATUS()==GPIO_PIN_SET);
tim2_stop();
//4.计算出中间经过的时间
totol_time=tim2_get_cnt();
//5.距离=速度(343m/s)*时间/2;
distance=totol_time*0.01715;
return distance;
}