windows 使用yolov5训练模型,之后opencv加载模型进行推理。
一,搭建环境
安装 Anaconda
二,创建虚拟环境并安装yolov5
conda create -n yolov5 python=3.9 -y
conda activate yolov5
git clone https://github.com/ultralytics/yolov5
cd yolov5
pip install -r requirements.txt
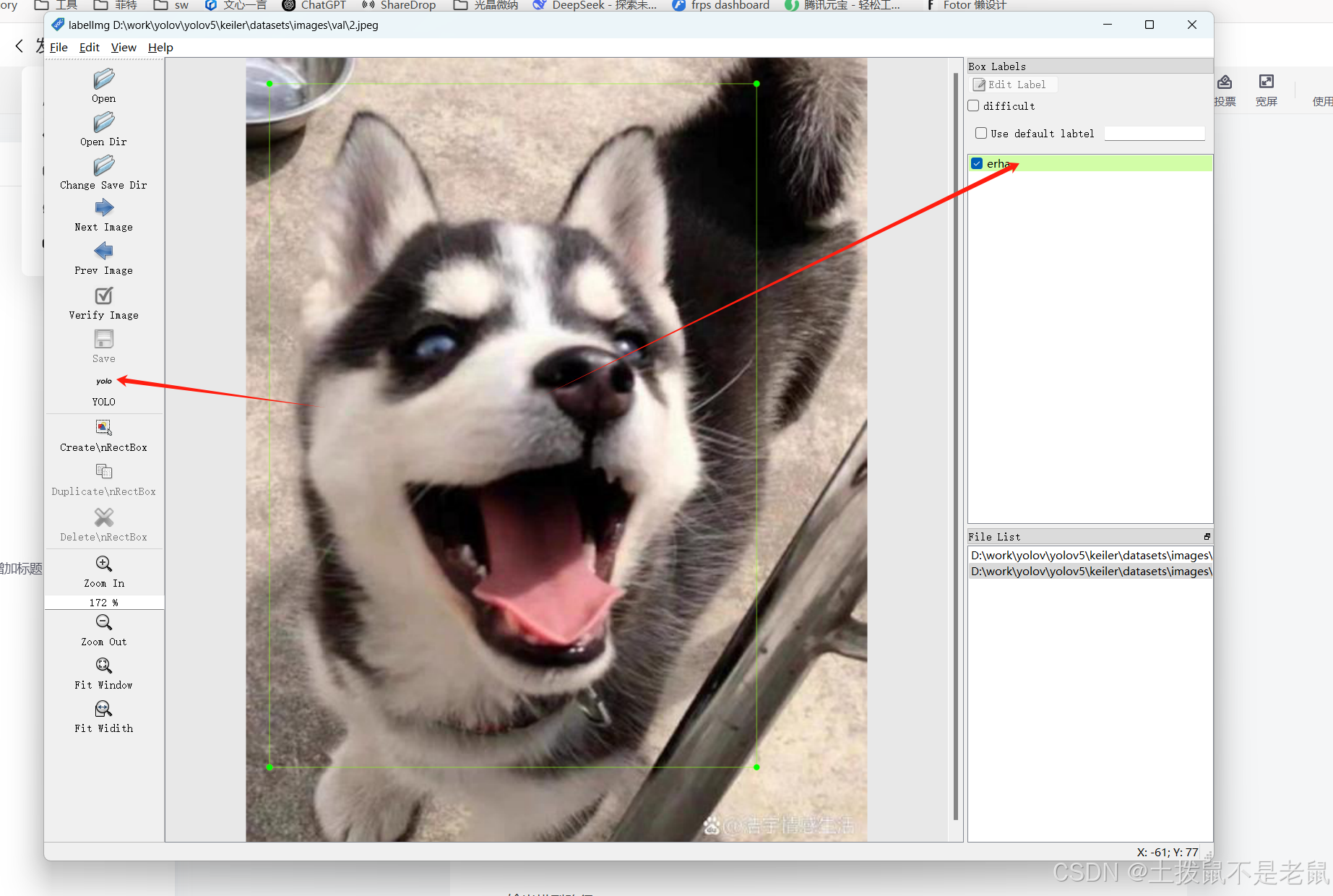
三,安装LabelImg 进行标注
四,准备训练配置
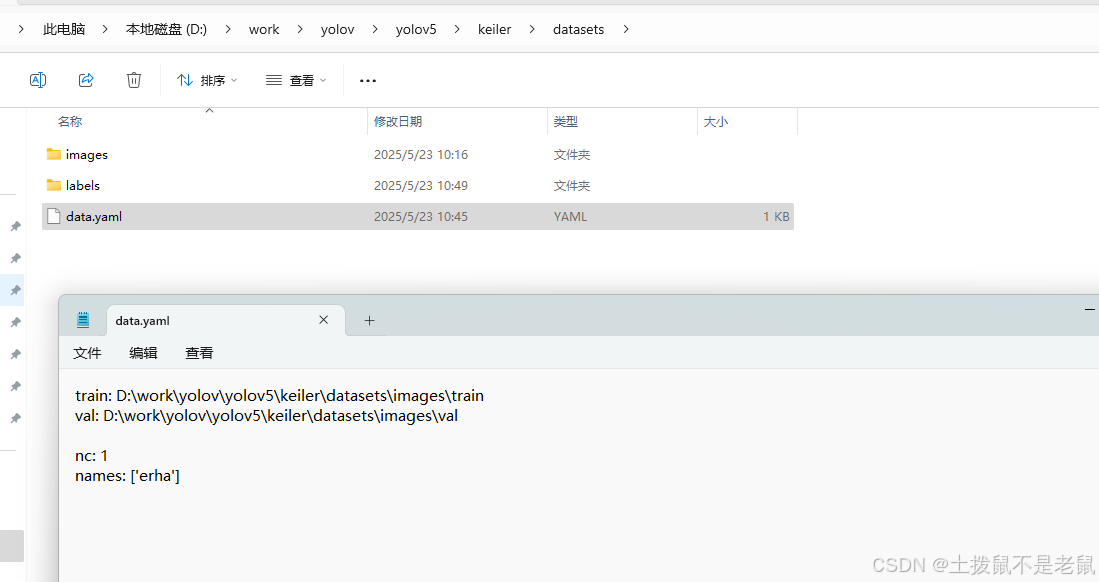
1,data.yaml
train: ./images/train
val: ./images/val
nc: 1
names: ['erha'] #类别名称,比如二哈2,确保图像和标签对应
images/train/img001.jpg
labels/train/img001.txt
3,训练
python train.py --img 640 --batch 16 --epochs 50 --data ./keiler/datasets/data.yaml --weights yolov5s.pt --name erha输出模型路径:
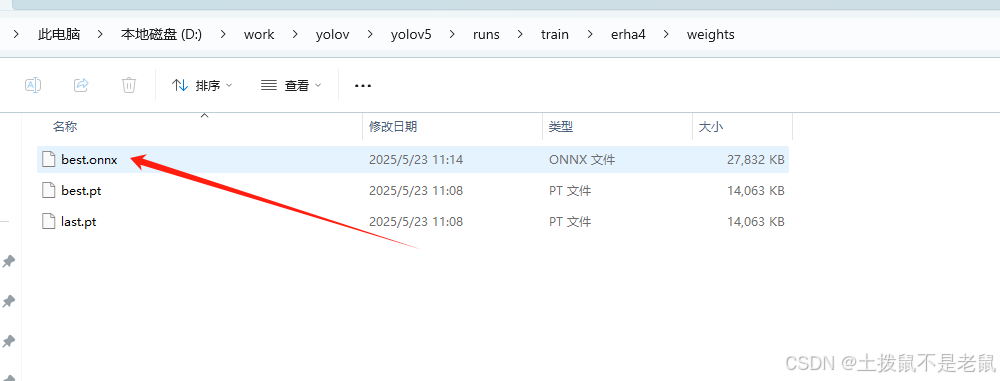
runs/train/erha4/weights/best.pt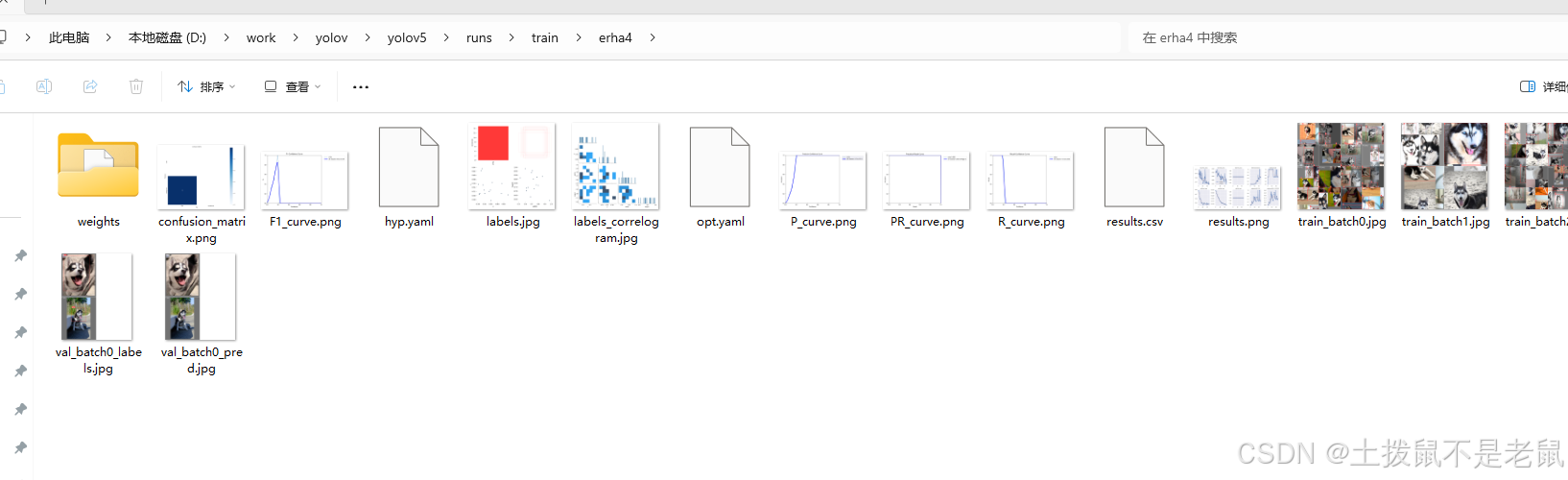
4,将模型 转成 onnx格式,这样才能给到opencv 加载

 五,opencv 推理
五,opencv 推理
#include <iostream>
#include <Thread/semaphore.h>
#include <signal.h>
#include "core/Engine.h"
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <iostream>
using namespace toolkit;
using namespace cv;
using namespace dnn;
using namespace std;
int main()
{
// 加载模型
Net net = readNetFromONNX("best.onnx");
net.setPreferableBackend(DNN_BACKEND_OPENCV);
net.setPreferableTarget(DNN_TARGET_CPU); // 可改为 DNN_TARGET_CUDA
cout << "Net is empty? " << net.empty() << endl;
// 读取图像
Mat image = imread("test.jpeg");
if (image.empty())
{
cerr << "Image not found!" << endl;
return -1;
}
// YOLOv5 输入大小
int input_width = 640;
int input_height = 640;
int num_classes = 1;
// 原图尺寸
int original_width = image.cols;
int original_height = image.rows;
// 预处理
Mat blob;
resize(image, image, Size(input_width, input_height));
blobFromImage(image, blob, 1.0 / 255.0, Size(input_width, input_height), Scalar(), true, false);
// 设置输入
net.setInput(blob);
// 前向推理
std::vector<Mat> outputs;
net.forward(outputs, net.getUnconnectedOutLayersNames());
// 后处理
float confThreshold = 0.001;
float nmsThreshold = 0.001;
vector<int> classIds;
vector<float> confidences;
vector<Rect> boxes;
// 输出维度 [1, N, 85]
Mat output = outputs[0];
const int num_detections = output.size[1];
const int dimensions = output.size[2];
float* data = (float*)output.data;
float x_factor = (float)original_width / input_width;
float y_factor = (float)original_height / input_height;
std::cout<<"num_detections "<<num_detections<<std::endl;
for (int i = 0; i < num_detections; ++i) {
float obj_conf = data[i * dimensions + 4];
std::cout<<" obj_conf"<<obj_conf<<std::endl;
if (obj_conf < confThreshold)
continue;
float* class_scores = data + i * dimensions + 5;
Mat scores(1, num_classes, CV_32F, class_scores);
Point classIdPoint;
double max_class_score;
minMaxLoc(scores, 0, &max_class_score, 0, &classIdPoint);
float confidence = obj_conf * (float)max_class_score;
std::cout<<" confidence"<<confidence<<std::endl;
if (confidence > confThreshold) {
// 解码框坐标
float cx = data[i * dimensions + 0];
float cy = data[i * dimensions + 1];
float w = data[i * dimensions + 2];
float h = data[i * dimensions + 3];
int left = (int)((cx - w / 2) * x_factor);
int top = (int)((cy - h / 2) * y_factor);
int width = (int)(w * x_factor);
int height = (int)(h * y_factor);
boxes.push_back(Rect(left, top, width, height));
confidences.push_back(confidence);
classIds.push_back(classIdPoint.x);
}
}
// NMS 抑制
vector<int> indices;
NMSBoxes(boxes, confidences, confThreshold, nmsThreshold, indices);
for (int idx : indices) {
Rect box = boxes[idx];
rectangle(image, box, Scalar(0, 255, 0), 2);
putText(image, to_string(classIds[idx]), box.tl(), FONT_HERSHEY_SIMPLEX, 0.6, Scalar(0, 0, 255), 2);
}
cv::imwrite("result.jpg", image);
}失败了,没有检测出来,稍后再查查。