用C#完成最小二乘法拟合平面方程,再计算点到面的距离
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
namespace ConsoleApp2
{
internal class Program
{
static void Main(string[] args)
{
double[] Xs =
{ 1, 2, 3, 4,
1, 2, 3, 4,
1, 2, 3, 4,
1, 2, 3, 4 };
double[] Ys =
{ 1, 1, 1, 1,
2, 2, 2, 2,
3, 3, 3, 3,
4, 4, 4, 4};
double[] Zs =
{0, 0, 0, 0,
0, 1, 1, 0,
0, 1, 1, 0,
0, 0, 0, 0 };
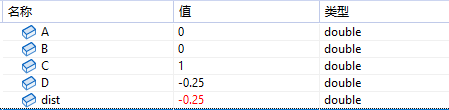
double A, B, C, D;
string strMsg = string.Empty;
Operator3D.FitPlane(Xs, Ys, Zs, out A, out B, out C, out D, out strMsg);
double dist = Operator3D.DistanceP2Plane(0, 0, 0, A, B, C, D, out strMsg);
}
}
class Operator3D
{
/// <summary>
/// 最小二乘法拟合平面方程,该方法通过计算协方差矩阵,并使用雅可比(Jacobi)方法求解其特征向量,从而得到最佳拟合平面的参数A\B\C\D
/// </summary>
/// <param name="Xs">三维点X坐标</param>
/// <param name="Ys">三维点Y坐标</param>
/// <param name="Zs">三维点Z坐标</param>
/// <param name="A">平面方程一般式参数A</param>
/// <param name="B">平面方程一般式参数B</param>
/// <param name="C">平面方程一般式参数C</param>
/// <param name="D">平面方程一般式参数D</param>
/// <param name="errorMsg"></param>
/// <returns></returns>
public static bool FitPlane(double[] Xs, double[] Ys, double[] Zs, out double A, out double B, out double C, out double D, out string error)
{
error = string.Empty;
A = B = C = D = 0;
try
{
// 验证输入数据有效性:保证输入数据不为空,数据长度一致,且至少有3个点
if (Xs == null || Ys == null || Zs == null)
{
error = "输入Xs、Ys、Zs数据为null";
return false;
}
else if (Xs.Length != Ys.Length || Xs.Length != Zs.Length)
{
error = "输入Xs、Ys、Zs数据长度不同";
return false;
}
else if (Xs.Length < 3)
{
error = "输入数据点数小于3";
return false;
}
int n = Xs.Length;
// 计算质心
double x0 = Average(Xs);
double y0 = Average(Ys);
double z0 = Average(Zs);
// 计算协方差矩阵
double[,] cov = new double[3, 3];
for (int i = 0; i < n; i++)
{
double dx = Xs[i] - x0;
double dy = Ys[i] - y0;
double dz = Zs[i] - z0;
cov[0, 0] += dx * dx;
cov[0, 1] += dx * dy;
cov[0, 2] += dx * dz;
cov[1, 1] += dy * dy;
cov[1, 2] += dy * dz;
cov[2, 2] += dz * dz;
}
// 填充对称元素
cov[1, 0] = cov[0, 1];
cov[2, 0] = cov[0, 2];
cov[2, 1] = cov[1, 2];
// 计算特征值和特征向量
if (!JacobiEigenvalue(cov, out double[] eigenvalues, out double[,] eigenvectors))
{
error = "雅可比特征值分解失败";
return false;
}
// 找到最小特征值的索引
int minIndex = 0;
for (int i = 1; i < 3; i++)
if (eigenvalues[i] < eigenvalues[minIndex])
minIndex = i;
// 获取法向量
A = eigenvectors[0, minIndex];
B = eigenvectors[1, minIndex];
C = eigenvectors[2, minIndex];
// 计算D
D = -(A * x0 + B * y0 + C * z0);
// 归一化平面方程(可选)
double norm = Math.Sqrt(A * A + B * B + C * C);
if (norm < 1e-12) // 避免除以零
{
error = "除数不能为零";
return false;
}
A /= norm;
B /= norm;
C /= norm;
D /= norm;
return true;
}
catch
{
error = "拟合平面失败";
return false;
}
}
//计算平均数
private static double Average(double[] arr)
{
double sum = 0;
foreach (double d in arr)
sum += d;
return sum / arr.Length;
}
//雅可比特征值分解
private static bool JacobiEigenvalue(double[,] matrix, out double[] eigenvalues, out double[,] eigenvectors)
{
int n = 3;
eigenvalues = new double[n];
eigenvectors = new double[n, n];
for (int i = 0; i < n; i++)
{
eigenvectors[i, i] = 1.0;
for (int j = 0; j < n; j++)
if (i != j)
eigenvectors[i, j] = 0.0;
}
const int maxIterations = 50;
const double epsilon = 1e-12;
for (int k = 0; k < maxIterations; k++)
{
// 找到最大的非对角元素
int p = 0, q = 0;
double maxVal = 0;
for (int i = 0; i < n; i++)
for (int j = i + 1; j < n; j++)
if (Math.Abs(matrix[i, j]) > maxVal)
{
maxVal = Math.Abs(matrix[i, j]);
p = i;
q = j;
}
if (maxVal < epsilon)
break;
// 计算旋转角度
double theta = 0.5 * Math.Atan2(2 * matrix[p, q], matrix[q, q] - matrix[p, p]);
double c = Math.Cos(theta);
double s = Math.Sin(theta);
// 更新矩阵
double new_pp = c * c * matrix[p, p] - 2 * c * s * matrix[p, q] + s * s * matrix[q, q];
double new_qq = s * s * matrix[p, p] + 2 * c * s * matrix[p, q] + c * c * matrix[q, q];
double new_pq = (c * c - s * s) * matrix[p, q] + c * s * (matrix[p, p] - matrix[q, q]);
matrix[p, p] = new_pp;
matrix[q, q] = new_qq;
matrix[p, q] = matrix[q, p] = new_pq;
// 更新其他行和列
for (int i = 0; i < n; i++)
{
if (i != p && i != q)
{
double new_ip = c * matrix[i, p] - s * matrix[i, q];
double new_iq = s * matrix[i, p] + c * matrix[i, q];
matrix[i, p] = matrix[p, i] = new_ip;
matrix[i, q] = matrix[q, i] = new_iq;
}
}
// 更新特征向量
for (int i = 0; i < n; i++)
{
double temp = eigenvectors[i, p];
eigenvectors[i, p] = c * temp - s * eigenvectors[i, q];
eigenvectors[i, q] = s * temp + c * eigenvectors[i, q];
}
}
// 提取特征值
for (int i = 0; i < n; i++)
eigenvalues[i] = matrix[i, i];
return true;
}
/// <summary>
/// 计算点到平面的带符号距离
/// </summary>
/// <param name="X">点的X坐标</param>
/// <param name="Y">点的Y坐标</param>
/// <param name="Z">点的Z坐标</param>
/// <param name="A">平面方程系数A</param>
/// <param name="B">平面方程系数B</param>
/// <param name="C">平面方程系数C</param>
/// <param name="D">平面方程系数D</param>
/// <returns>
/// 带符号的距离值:
/// - 正值表示点在法向量指向的一侧
/// - 负值表示点在法向量反向的一侧
/// - 零表示点在平面上
/// </returns>
public static double DistanceP2Plane(double X, double Y, double Z, double A, double B, double C, double D, out string error)
{
error = string.Empty;
try
{
// 计算公式:(A*X + B*Y + C*Z + D) / √(A² + B² + C²)
double numerator = A * X + B * Y + C * Z + D;
double denominator = Math.Sqrt(A * A + B * B + C * C);
// 处理极小值防止除以零
if (Math.Abs(denominator) < 1e-12)
{
error = "非法平面参数";
return double.NaN; // 非法平面参数时返回NaN
}
return numerator / denominator;
}
catch (Exception)
{
error = "非法平面参数,计算失败";
throw;
}
}