中文标题: CFTel:一种基于云雾自动化的鲁棒且可扩展的远程机器人架构 英文标题: CFTel: A Practical Architecture for Robust and Scalable Telerobotics with Cloud-Fog Automation
作者信息
Thien Tran, Jonathan Kua, Minh Tran, Honghao Lyu, Thuong Hoang, Jiong Jin
Deakin University, Australia
RMIT University, Vietnam
Zhejiang University, China
Swinburne University of Technology, Australia
University of Tasmania, Australia
论文出处
会议论文,发表于2025年5月
摘要
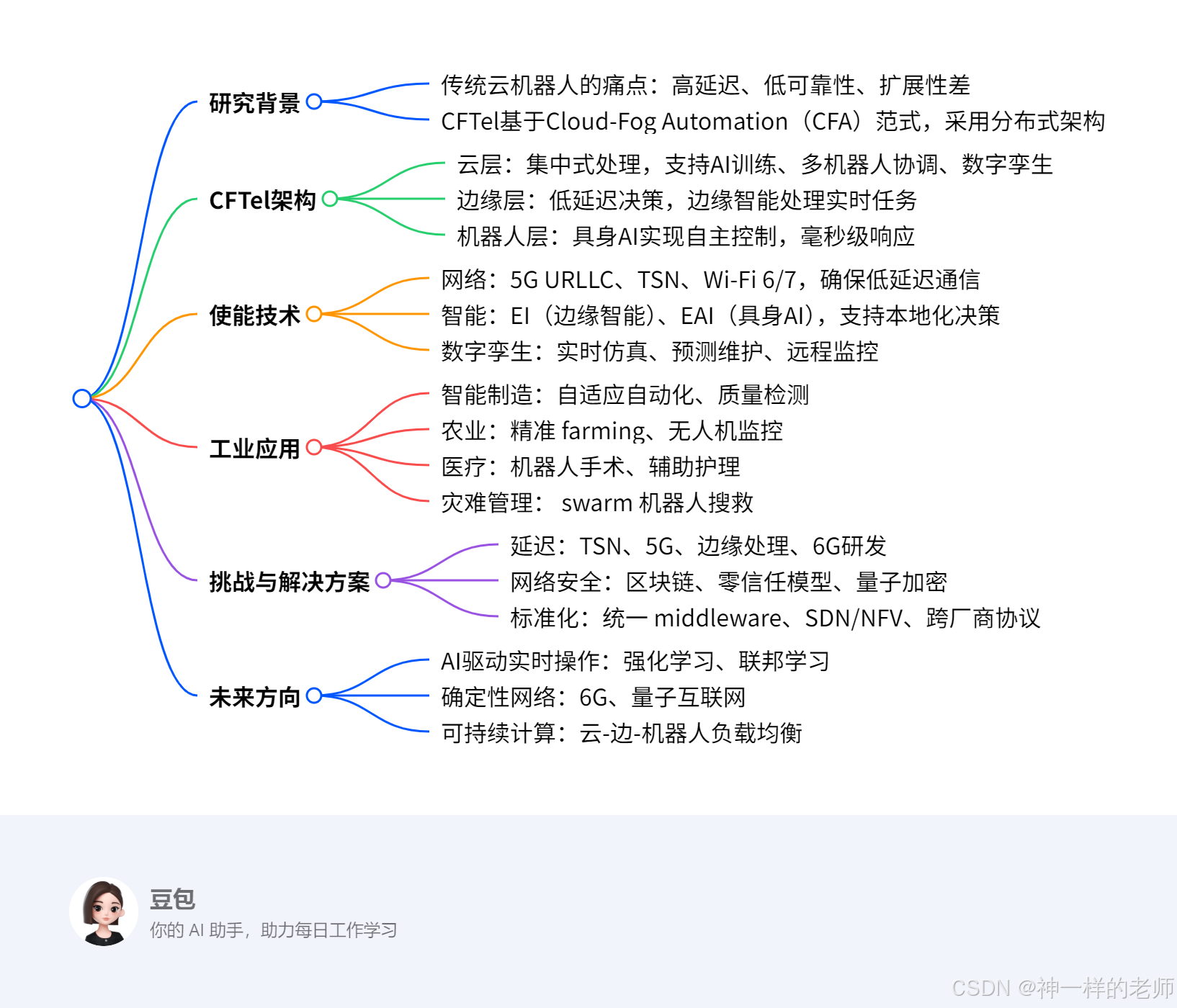
本文介绍了Cloud-Fog Telerobotics(CFTel),这是一种基于Cloud-Fog Automation(CFA)范式的远程机器人架构,旨在解决传统基于云计算的远程机器人系统中存在的延迟、可靠性、可扩展性和弹性问题。CFTel通过分布式云-边缘-机器人计算架构,实现确定性连接、确定性连接智能和确定性网络计算。文章综合了CFTel的最新进展,强调其在促进可扩展、低延迟、自主和AI驱动的远程机器人中的作用。研究分析了CFTel的架构框架和使能技术,包括5G超可靠低延迟通信、边缘智能、体现AI和数字孪生,并讨论了实际挑战,如延迟约束、网络安全风险、互操作性问题和标准化努力。
引言
远程机器人是下一代工业网络物理系统(ICPS)的关键应用,它使得在复杂环境中远程控制机器人系统成为可能。传统基于云计算的远程机器人依赖于集中式处理,面临着显著的延迟和网络拥塞问题,限制了其在工业自动化关键应用中的实时性能。CFTel通过整合分布式云-边缘-机器人架构、确定性网络、边缘智能(EI)、体现AI(EAI)和数字孪生(DTs)来解决这些挑战,提供可扩展、低延迟、自主和智能的远程机器人系统。该框架利用云雾计算的联合能力,强调确定性通信、计算和控制,以及可扩展的服务导向解决方案。CFTel通过在云、边缘和机器人层分布计算工作负载,增强了传统远程机器人系统。云层支持大数据分析、AI模型部署和多机器人协调;边缘节点实现低延迟AI推理、时间敏感操作,并使用雾计算分散计算负载;机器人层通过EAI确保对动态环境的自主适应。确定性网络技术,如5G超可靠低延迟通信(URLLC)和时间敏感网络(TSN),支撑实时控制,确保高可靠性网络。
云雾远程机器人架构
CFTel采用分层的云-边缘-机器人架构来分布计算和操作工作负载,确保确定性通信、计算和控制。表I比较了传统基于云计算的远程机器人与提出的架构的限制,通过整合分布式、分散式和本地化处理,该方法实现计算负载平衡、时间敏感决策、安全性、可扩展性和弹性,支持服务导向解决方案,如机器人即服务(RaaS)、控制即服务(CaaS)和制造即服务(MaaS)。
云层
云层作为集中式处理中心,提供广泛的数据存储、大数据分析和大规模AI模型训练。它通过任务如预测性维护、多机器人任务分配和车队范围的优化来实现全球智能。云支持可扩展的、供应商独立的模型,如MaaS,实现异构机器人系统的无缝集成。云还托管数字孪生,物理系统的虚拟副本,用于实时仿真和诊断。
边缘层
边缘层通过在靠近机器人系统的边缘节点处理数据,实现低延迟决策和AI推理。部署在工业环境中,边缘节点执行轻量级AI模型,用于时间敏感任务,包括质量检查、路径规划、系统故障检测和数据加密。这一层采用雾计算原则,通常称为EI,减少对云的依赖,增强安全性并优化带宽。
机器人层
机器人层提供超低延迟执行,利用EAI实现实时机器人控制和自主性。这一层处理传感器输入,如激光雷达、摄像头和触觉反馈,以实现毫秒级响应。EAI使机器人能够感知、学习并适应动态环境,增强人机交互。
使能技术
CFTel的实施依赖于确保确定性通信、实时计算和智能控制的先进技术。本节考察了三个关键使能技术:网络基础设施、EI和EAI以及数字孪生。这些技术支撑分层架构,促进可扩展、低延迟和自主的远程机器人操作。
网络基础设施
强大的网络基础设施是CFTel的骨干,提供确定性、低延迟通信。时间敏感网络(TSN)扩展了以太网,确保数据传输的确定性,减少抖动。5G和未来的6G提供了超低延迟和高可靠性通信,支持远程机器人操作。Wi-Fi 6/7标准提供了高吞吐量、低延迟和改进的性能,补充了5G和TSN,增强了无线连接。
边缘智能和体现AI
EI和EAI在机器人层协同工作,利用雾边缘计算实现低延迟推理,使机器人能够在工业网络物理系统应用中适应性强、弹性好。EI在边缘节点部署AI模型,本地处理数据以减少延迟和云依赖。EAI将AI集成到物理系统中,通过传感器融合和强化学习,实现自适应自主性,使机器人能够在最少的人工干预下执行复杂任务。
数字孪生
数字孪生是物理机器人系统的虚拟表示,实时反映其状态和行为,以优化CFTel中的性能和可靠性。数字孪生主要托管在云或边缘层,整合来自机器人和边缘节点的数据,提供实时洞察。
工业应用
本节探讨了CFTel在智能制造和农业、物流和仓储、医疗保健和灾难管理中的变革性影响,详细介绍了特定用例、好处和挑战。
智能制造和农业
CFTel的分布式架构通过启用自适应自动化、远程监控和预测性维护,推动了智能制造的发展。云中的AI分析传感器数据以预测设备故障,减少工厂停机时间,并执行高级决策。机器人手臂在汽车装配线上使用雾计算进行实时质量检查,即时检测缺陷以减少浪费。边缘节点赋予机器人自适应控制能力,使它们能够立即响应生产异常,从而提高运营效率和成本效益。
物流和仓储
CFTel通过启用自主机器人车队的实时协调,改变了物流和仓储,提高了效率和吞吐量。云层使用AI驱动的算法优化车队范围的操作,而边缘节点处理本地任务,如避障和路径规划。借助5G URLLC,机器人可以动态导航,实现亚毫秒级的与其他机器人和人类工人的协调,提高安全性和速度。
医疗保健
在医疗保健中,CFTel使机器人辅助手术和辅助机器人成为可能,满足了对远程干预和患者支持的需求。CFTel通过引导复杂的外科手术程序,结合先进的健康技术,如达芬奇外科手术系统,提高了外科手术的精确性和灵活性。雾计算确保了低延迟控制,这对于在远程机器人手术中保持准确性至关重要,实现了亚毫秒级的响应时间。
灾难管理
在灾难管理中,CFTel至关重要,其中群体机器人在危险环境中执行搜索和救援任务。云雾计算使实时信息共享和协调成为可能,而边缘节点上的分散式AI模型促进了自主决策。部署在地震灾区的机器人使用EAI导航,并通过5G协调以寻找幸存者。数字孪生远程监控机器人状态,允许操作员通过沉浸式界面优化任务策略。
实际挑战
尽管CFTel具有变革潜力,但其广泛采用面临重大挑战,这些挑战涉及技术性能、安全性和系统互操作性,影响远程机器人应用的可靠性、安全性和可扩展性。
延迟和实时约束
在远程机器人手术和灾难响应中的多机器人协调等时间关键应用中,实现超低延迟和确定性实时通信是一个重大挑战。尽管TSN提供了确定性的以太网传输,5G URLLC实现了大约1毫秒的延迟和99.999%的可靠性,但这些技术在动态条件下仍会遇到困难,例如在物流枢纽中网络负载波动时。AI驱动的网络编排可以优先处理关键数据流,而延迟感知的边缘处理可以将计算卸载到边缘节点,减少传输延迟。
网络安全
CFTel架构引入了网络安全风险,因为数据和控制信号跨越多个层级,容易受到中间人攻击、对抗性AI和勒索软件等威胁。未经授权访问远程机器人系统可能会破坏操作并泄露敏感数据,在关键应用中可能会产生严重后果。传统的安全措施至关重要,但它们会引入延迟并与其他高级要求冲突。先进的解决方案,如基于区块链的认证和零信任安全模型,提供了强大的保护,但会带来计算开销。在多智能体机器人系统中,建立机器人之间的信任是复杂的,需要不依赖于集中式信任的分散式安全模型。
标准化
缺乏标准化框架和协议是CFTel可扩展性和互操作性的主要障碍。工业中普遍存在的专有架构和通信协议导致兼容性问题,使得来自不同供应商的机器人系统的集成变得复杂。这种碎片化限制了高效的数据交换和实时协作,限制了CFTel在大规模自主ICPS应用中的采用。
结论和未来研究方向
本文全面探讨了CFTel及其在推进ICPS中的关键作用。通过利用CFA,CFTel克服了传统基于云计算的远程机器人的局限性,通过云-边缘-机器人架构实现了确定性通信、计算和控制。尽管取得了这些进展,但延迟、网络安全和标准化等挑战仍然存在,需要创新的解决方案以确保可靠性和可扩展性。本文为研究人员和行业专业人士提供了一个基础资源,综合了最新的进展,并为远程机器人技术的未来发展提供了路线图,从而促进了自主和智能工业自动化的演变。需要进一步的研究来充分利用CFTel的潜力,解决现有约束,并利用新兴技术进步,以促进下一代自主和安全工业系统的发展。