引言
在嵌入式系统中,通信总线是连接 CPU 与外设的桥梁。从 I2C、SPI 到 UART,每种总线都有其独特的应用场景。而本文要介绍的1-Wire 一线式总线,以其极简的硬件设计和独特的通信协议,在温度采集、身份识别等领域大放异彩。本文将从原理入手,结合 STM32 与 DS18B20 温度传感器的实战案例,带您深入理解一线式总线的奥秘。
一、一线式总线的核心原理
1. 定义与特性
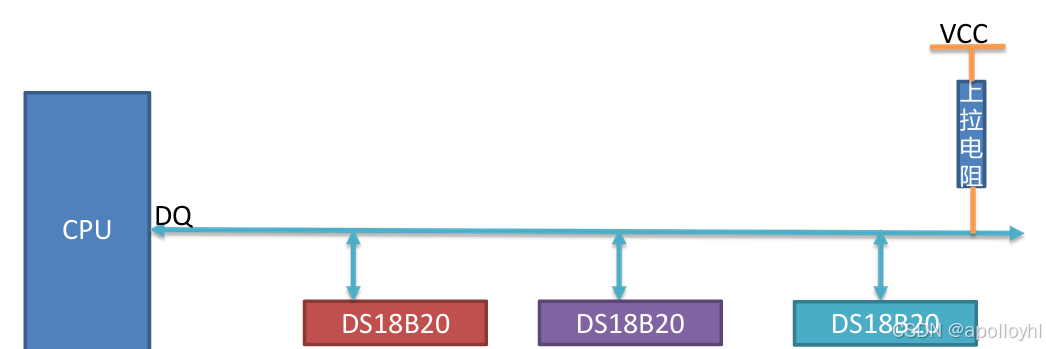
一线式串行总线,顾名思义,只需一根数据线即可实现 CPU 与外设的通信(需上拉电阻,默认高电平)。与 I2C、SPI 等多线总线不同,它的特点是:
单数据线:数据传输与时钟同步都依赖这根线。
串行通信:一位一位地传输数据,而非并行。
总线结构:支持多个从设备挂接在同一数据线上(需通过 ROM 寻址)。
2. 时钟机制:无时钟线如何同步?
一线式总线没有独立的时钟信号线,它通过严格的时序控制实现数据同步:
主设备(MCU) 通过精确控制数据线的高低电平持续时间,定义时钟周期。
从设备(如 DS18B20)根据主设备的时序要求,在特定时间窗口内采样或发送数据。
这种设计虽然增加了软件实现的复杂度,但极大简化了硬件连接。
二、DS18B20 温度传感器实战:硬件设计
1. 硬件连接
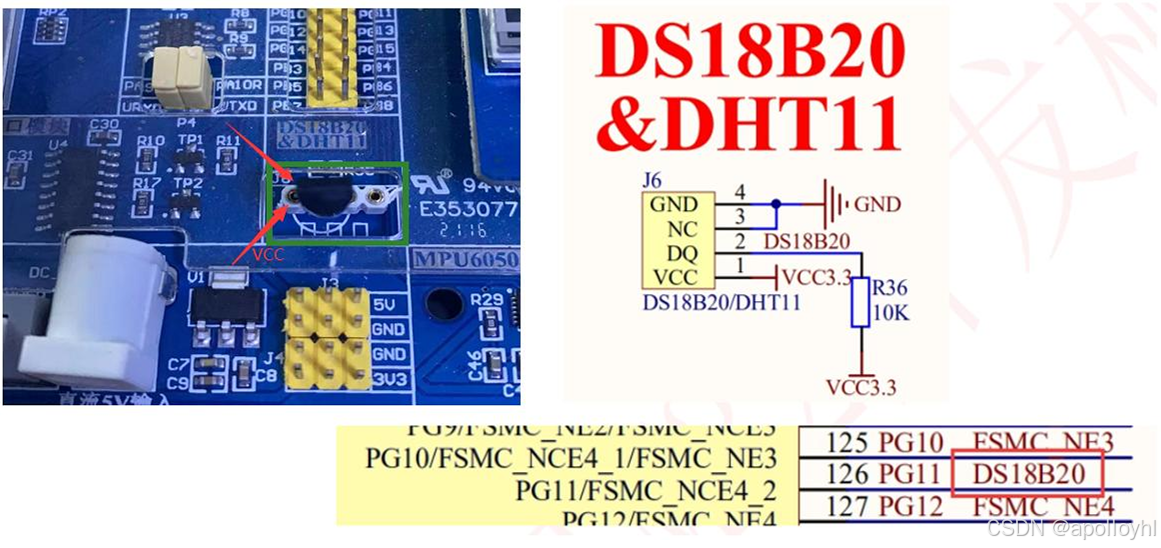
以 STM32F103 与 DS18B20 为例,硬件连接如下:
数据线(DQ):连接 STM32 的 PG11 引脚(需 4.7KΩ 上拉电阻)。
电源(VDD):接 3.3V 或 5V(支持寄生电源模式,本文使用外部供电)。
地(GND):共地。
2. GPIO 初始化代码
// 定义DS18B20连接引脚
#define DS18B20_PORT GPIOG
#define DS18B20_PIN GPIO_Pin_11
#define DS18B20_IO_OUT DS18B20_PORT->ODR
#define DS18B20_IO_IN DS18B20_PORT->IDR
void DS18B20_Init(void) {
// 1. 打开GPIOG时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG, ENABLE);
// 2. 配置PG11为推挽输出,50MHz
GPIO_InitTypeDef GPIO_Config;
GPIO_Config.GPIO_Pin = DS18B20_PIN;
GPIO_Config.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Config.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(DS18B20_PORT, &GPIO_Config);
}
三、一线式总线通信协议详解
1. 通信三部曲
由厂家提供的芯片手册可知要想获取温度值,访问 DS18B20 需遵循固定顺序:
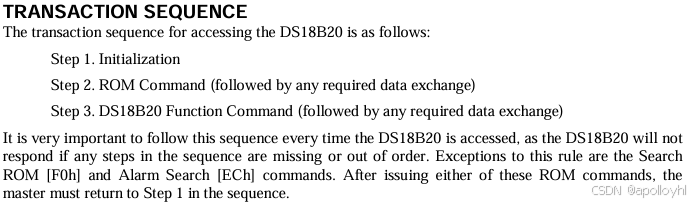
初始化复位:类似 I2C 的 START 信号,检测设备是否在线。
发送 ROM 命令:识别总线上的特定设备(如读取唯一 ID 或跳过 ID 直接访问)。
发送功能命令:执行具体操作(如温度转换、读取寄存器)。
2. 底层时序实现
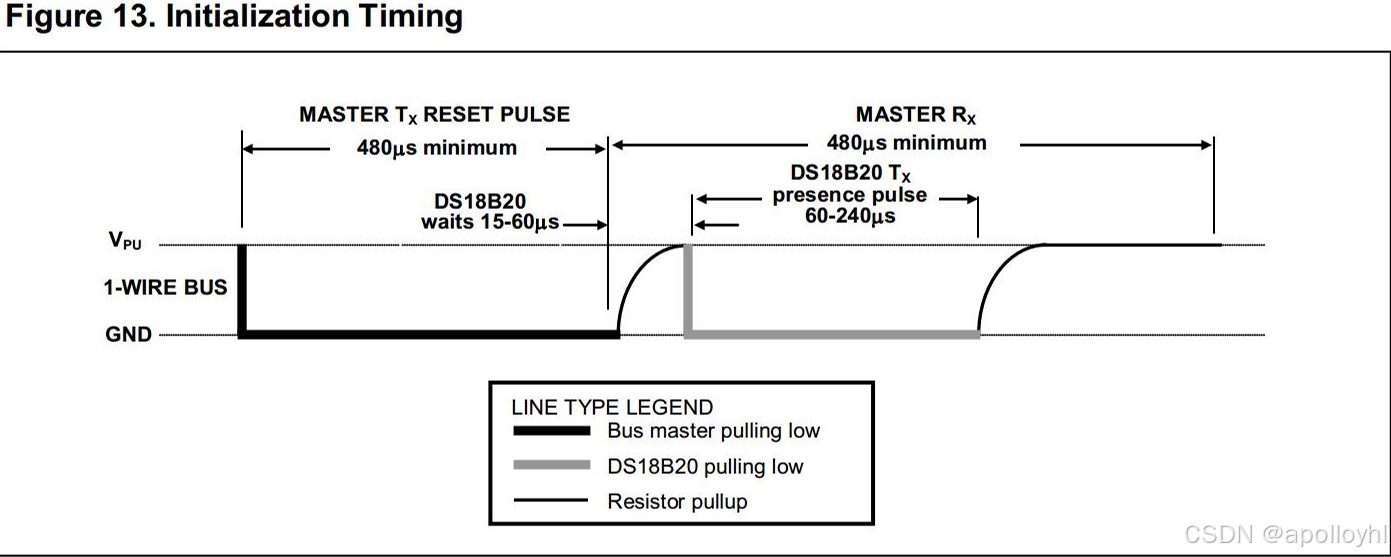
(1)初始化复位信号
// 初始化复位
void DS18B20_Reset(void) {
u8 tempTime = 0;
// 1. 拉低总线 >=480us
DS18B20_OUT();
DS18B20_IO_OUT = 0;
delay_us(500);
// 2. 释放总线(拉高)15~60us
DS18B20_IO_OUT = 1;
delay_us(30);
// 3. 等待DS18B20应答(拉低60~240us)
DS18B20_IN();
while (DS18B20_IO_IN && tempTime < 240) {
tempTime++;
delay_us(1);
}
if (tempTime >= 240) {
printf("DS18B20 Reset Failed\n");
} else {
printf("DS18B20 Reset Success\n");
tempTime = 0;
}
// 4. 总线恢复高电平
delay_us(200);
}
(2)数据读写操作
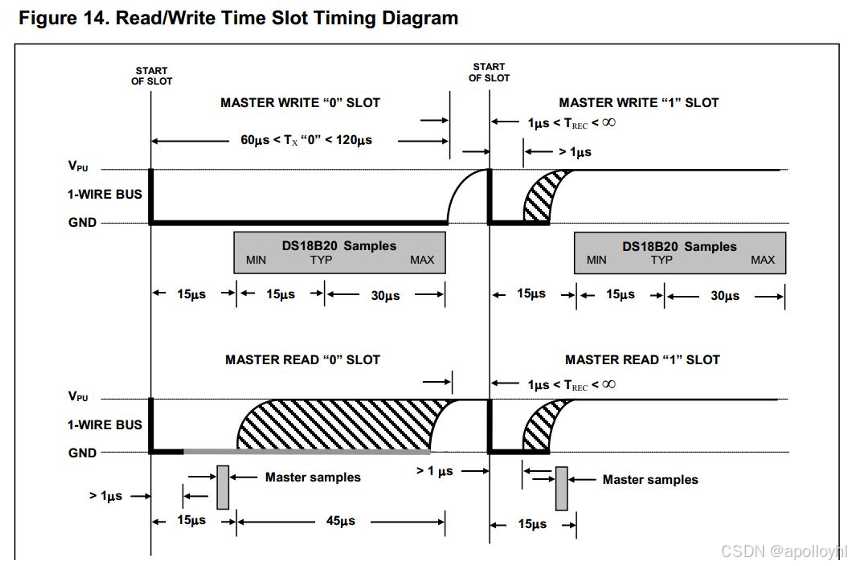
// 发送单字节
void DS18B20_Write_Byte(u8 data) {
u8 i;
DS18B20_OUT();
for (i = 0; i < 8; i++) {
if (data & 0x01) { // 写1
// 拉低 >1us
DS18B20_IO_OUT = 0;
delay_us(2);
// 拉高 >45us
DS18B20_IO_OUT = 1;
delay_us(60);
} else { // 写0
// 拉低60~120us
DS18B20_IO_OUT = 0;
delay_us(60);
// 拉高 >1us
DS18B20_IO_OUT = 1;
delay_us(2);
}
data >>= 1;
}
}
// 读取单字节
u8 DS18B20_Read_Byte(void) {
u8 i, data = 0;
for (i = 0; i < 8; i++) {
// 1. 拉低 >1us
DS18B20_OUT();
DS18B20_IO_OUT = 0;
delay_us(2);
// 2. 释放总线,准备读取
DS18B20_IN();
delay_us(8); // 等待DS18B20输出数据
// 3. 读取数据
data |= DS18B20_IO_IN << i;
delay_us(50); // 完成读时隙
}
return data;
}
四、DS18B20 温度采集实战
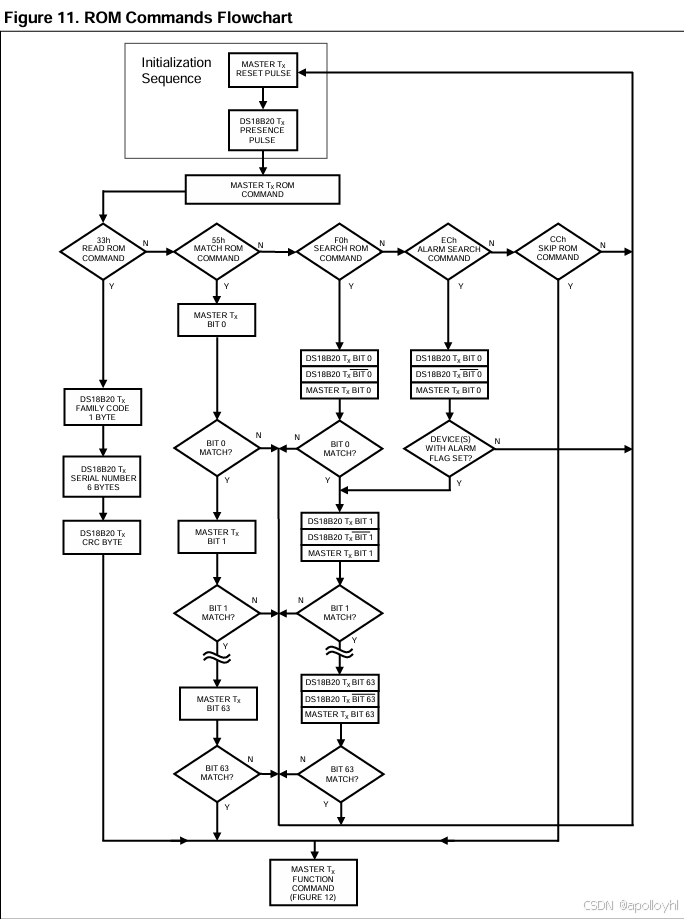
1. ROM 命令与功能命令
DS18B20 支持多种 ROM 命令,常见的有:
SKIP ROM(0xCC):跳过 ROM 匹配,适用于单设备场景。
MATCH ROM(0x55):匹配特定设备的 64 位 ROM ID,适用于多设备场景。
功能命令则包括:
CONVERT T(0x44):启动温度转换。
READ SCRATCHPAD(0xBE):读取温度寄存器数据。
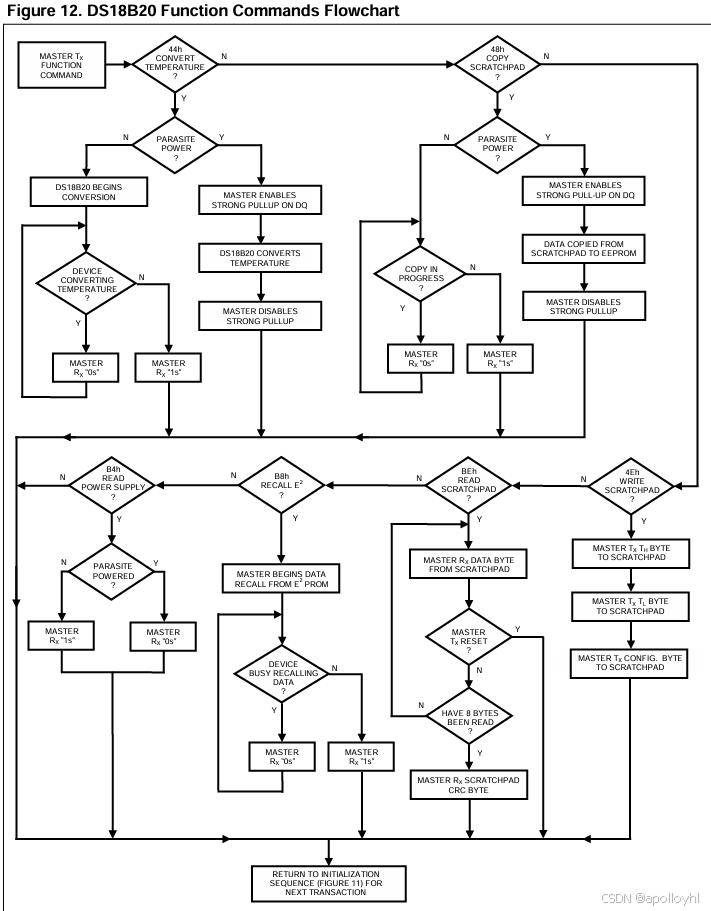
2. 温度采集代码实现
(1)单设备场景(SKIP ROM)
// 获取温度值(单设备)
float DS18B20_GetTemperature(void) {
u8 temp_lsb, temp_msb;
u16 temp;
float value;
// 1. 初始化 -> SKIP ROM -> 启动温度转换
DS18B20_Reset();
DS18B20_Write_Byte(0xCC); // SKIP ROM
DS18B20_Write_Byte(0x44); // CONVERT T
delay_ms(800); // 等待转换完成(最大750ms)
// 2. 初始化 -> SKIP ROM -> 读取温度寄存器
DS18B20_Reset();
DS18B20_Write_Byte(0xCC); // SKIP ROM
DS18B20_Write_Byte(0xBE); // READ SCRATCHPAD
// 3. 读取温度数据(低8位和高8位)
temp_lsb = DS18B20_Read_Byte();
temp_msb = DS18B20_Read_Byte();
temp = (temp_msb << 8) | temp_lsb;
// 4. 温度值转换(分辨率默认为12位)
if ((temp & 0xF800) == 0xF800) { // 负数
temp = (~temp) + 1;
value = temp * (-0.0625);
} else { // 正数
value = temp * 0.0625;
}
return value;
}
(2)多设备场景(MATCH ROM)
u8 rom[8]; // 存储DS18B20的64位ROM ID
// 读取ROM值
void DS18B20_ReadRom(void) {
u8 i;
DS18B20_Reset();
DS18B20_Write_Byte(0x33); // READ ROM
for (i = 0; i < 8; i++) {
rom[i] = DS18B20_Read_Byte();
printf("%02X ", rom[i]);
}
printf("\n");
}
// 匹配指定ROM的设备
void DS18B20_MatchRom(void) {
u8 i;
DS18B20_Reset();
DS18B20_Write_Byte(0x55); // MATCH ROM
for (i = 0; i < 8; i++) {
DS18B20_Write_Byte(rom[i]);
}
}
// 获取指定设备的温度(多设备场景)
float DS18B20_GetTemperature(void) {
// 与单设备类似,但将SKIP ROM替换为MATCH ROM
// ...
}
五、常见问题与优化建议
1. 通信稳定性问题
上拉电阻:务必使用 4.7KΩ 上拉电阻,确保总线在空闲时为高电平。
延时精度:一线式总线对时序要求极高,建议使用精确的微秒级延时函数。
线路长度:数据线过长会导致信号衰减,建议控制在 2 米以内(或增加驱动电路)。
2. 多设备寻址技巧
ROM 搜索算法:通过
SEARCH ROM(0xF0)命令遍历总线上所有设备的 ROM ID。寄生电源模式:DS18B20 可通过数据线获取电源,但可能影响稳定性,建议优先使用外部供电。
3. 代码优化方向
超时处理:在关键通信环节添加超时检测,避免程序卡死。
CRC 校验:DS18B20 的 ROM 和数据寄存器包含 CRC 校验值,可提高数据可靠性。
六、总结
一线式总线以其极简的硬件设计和独特的通信机制,为嵌入式系统提供了一种低成本、易扩展的解决方案。通过本文的实战案例,我们掌握了 DS18B20 温度传感器的基本原理和编程方法,理解了一线式总线的通信协议与实现技巧。
在实际应用中,一线式总线不仅适用于温度采集,还可用于湿度、压力等多种传感器的连接。掌握这一技术,将为您的嵌入式开发工具箱增添一件有力武器!