一、使用方式
1. 安装与挂载
快速卡槽设计:通过弹簧锁扣与滑动卡槽固定于无人机机腹中部,确保重心稳定。
物理按键操控:模块前方设物理按键,连接后可直接手动控制开合,紧急情况下无需依赖遥控器。
适配多机型:通过拓展接口或接收机接线实现控制。
2. 操作流程
遥控/APP控:通过遥控器通道或专用APP设定抛投时机,支持单次或分段投放。
两段式抛投:
第一阶段轻释放物品,避免重力撞击损坏;
第二阶段以预设速度/角度精准抛投。
自动识别:部分高端型号自动识别负载重量,实时提示状态。
二、技术要点
1. 结构设计
轻量化材料:主体采用航空铝与碳纤维,降低自重。
传动优化:齿轮-齿条替代传统丝杆,简化结构并提升可靠性。
防护等级:IP54防尘防水,适应雨雾、沙尘环境。
2. 精准投放技术
多传感器融合:结合激光瞄准、北斗/GPS定位及视觉系统,实现动态定位,误差<0.5米。
风场建模补偿:AI算法实时分析气流,调整抛投轨迹。
3. 智能控制
多仓位管理:独立控制多仓位物资,支持一键全投或分批投放。
4. 能源与续航
高效BMS系统:智能电池管理,支持-10℃~40℃环境,50分钟快充,保障长时间任务。
三、技术难点
1. 复杂环境适应性
电磁干扰:强电磁场易导致通信中断,需动态跳频与定向天线抗干扰。
气象影响:强风/气流扰动抛投轨迹,依赖风场建模与推力补偿算法。
高海拔挑战:低压低温环境引发电路击穿风险,需耐压元件与降额设计。
2. 精准投放冲突
传感器数据同步:多源数据融合时易出现时序冲突,采用扩展卡尔曼滤波或深度学习优化。
动态目标追踪:无人机高速移动中投放移动目标,需预判轨迹的实时计算能力。
3. 能源与结构平衡
功耗矛盾:大功率电机与连续抛投加剧耗电,轻量化设计(如折叠旋翼)与高容量电池需协同优化。
载重限制:材料强度需匹配无人机负载,ANSYS仿真验证应力分布。
4. 安全风险控制
意外脱落:机械锁扣+电子双保险(如智飞侠BK3防滑材料与自动解锁)。
法规合规:空域管理要求“人在环中”决策机制,避免自主投放越权。
四、运行方式
1. 控制链路流程
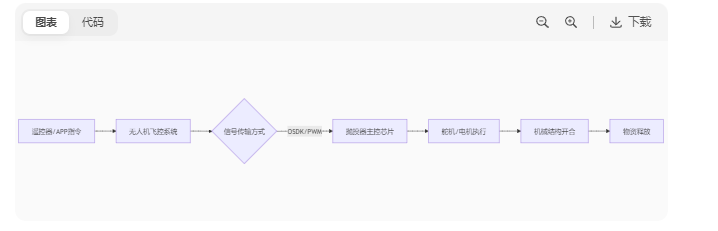
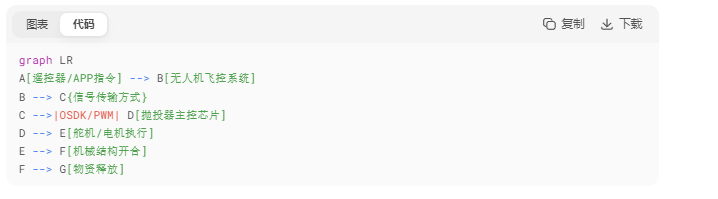
信号经接收机驱动舵机,拉动齿轮/齿条分离插销。
2. 动态抛投逻辑
悬停抛投:传统方式,无人机悬停目标点上方,精度高但效率低。
动态抛投:结合视觉定位与速度矢量计算,飞行中实时投放。
3. 异常处理机制
通信中断时自动返航,物资未投放则锁定机构;电压异常触发强制开锁。
五、典型产品性能对比
下表为主要抛投器技术参数概览:

总结与趋势
无人机抛投器技术正向高精度动态投放、智能抗干扰及多场景自适应演进。未来突破点在于:
材料创新:铝-铁氧体复合屏蔽层提升抗电磁性;
算法升级:5G+量子加密强化远程控制安全性;
能源优化:预测性维护模型延长设备寿命。
