1.环境搭建
在工作空间src下git wpr_simulation,安装install_for_noetic.sh,然后再回退工作空间进行编译
下载参数文件
git clone https://github.com/6-robot/wpb_home.git
下载需要魔法,在这里可以使用手机热点进行平替
 进入脚本文件夹
进入脚本文件夹
cd wpb_home/wpb_home_bringup/scripts/
执行依赖项安装程序
./install_for_noetic.sh2.代码编写
新建包
catkin_create_pkg nav_pkg roscpp rospy move_base_msgs actionlib编写launch文件
<launch>
<node pkg="move_base" type="move_base" name="move_base">
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" />
</node>
<node pkg="map_server" type="map_server" name="map_server" args="$(find wpr_simulation)/maps/map.yaml"/>
<node pkg="amcl" type="amcl" name="amcl"/>
</launch>tree一下文件结构
nav_pkg
├── CMakeLists.txt
├── include
│ └── nav_pkg
├── launch
│ └── nav.launch
├── package.xml
└── src
启动仿真环境
roslaunch wpr_simulation wpb_stage_robocup.launch 新建终端执行导航命令
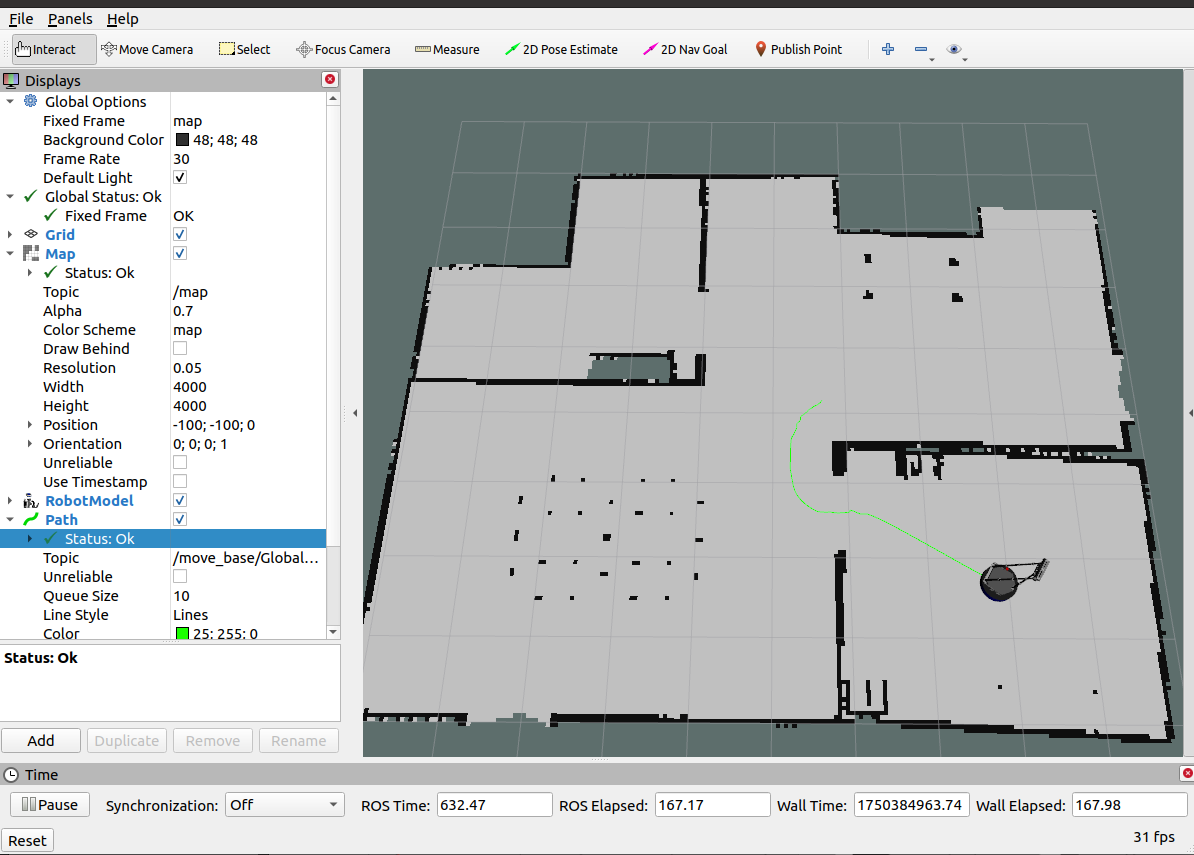
roslaunch nav_pkg nav.launch 再新建终端,打开可视化界面
rvizadd path map robotmodel ,再使用上面栏的2D Nav Goal给出目标地点
3.Amcl可视化
增加Posearray,并订阅、、、相关话题

