前言:
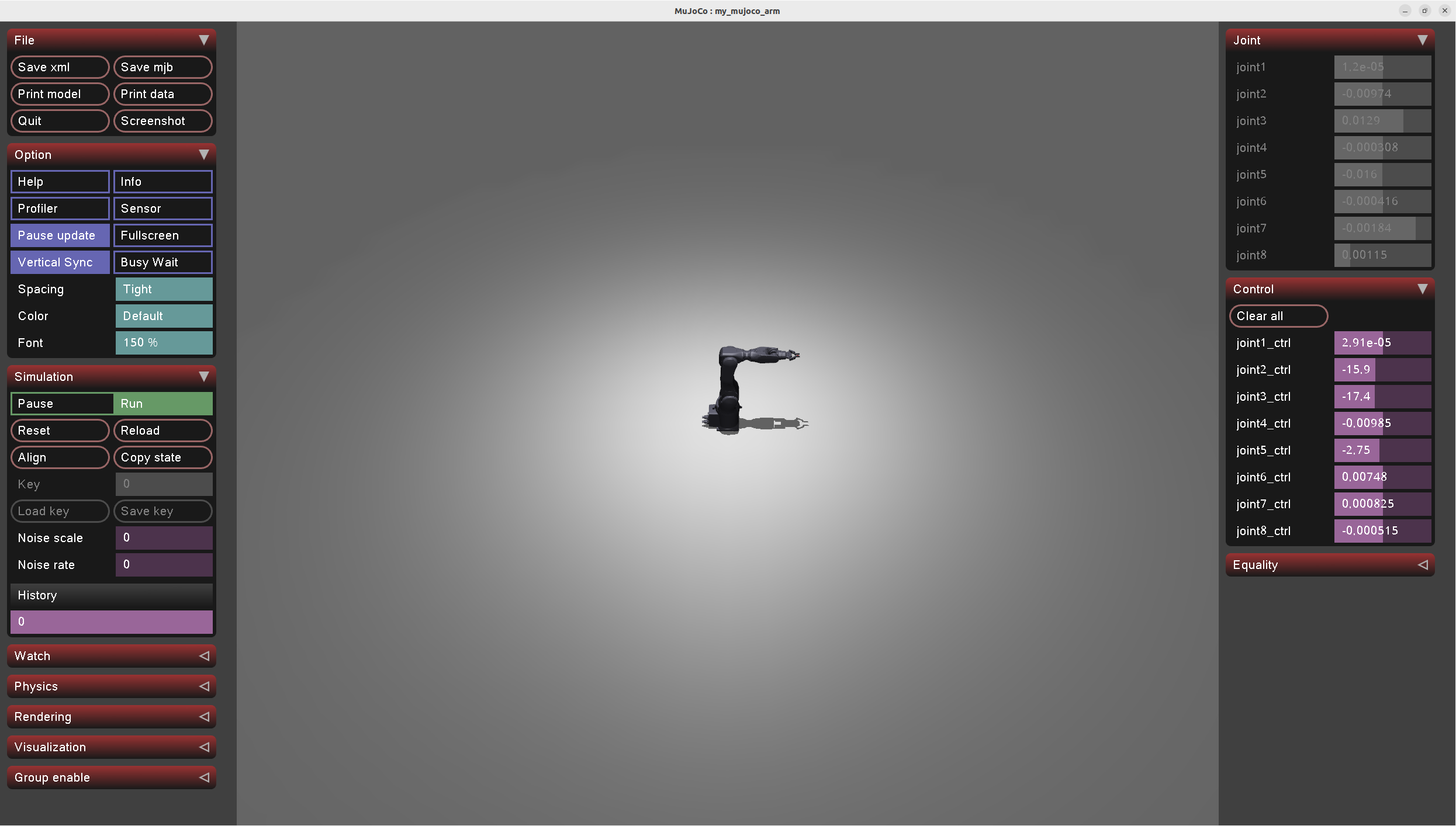
之前在这篇帖子(5)ROS:MUJOCO仿真环境迁移教程_mujoco文件用gezabo打开的方法和注意事项-CSDN博客中介绍过如何将ros2的仿真环境由gazebo迁移到mujoco,但是当时使用的ros官方源码的迁移程序中,对mujoco的渲染是使用的自定义的mujoco_rendering.cpp,相当于实现了极简的纯仿真环境,但是没有mujoco原版那样默认丰富的侧边可交互UI,本篇介绍如何使用mujoco官方定义的simulate仿真UI替换原来的mujoco_rendering.cpp。
正文:
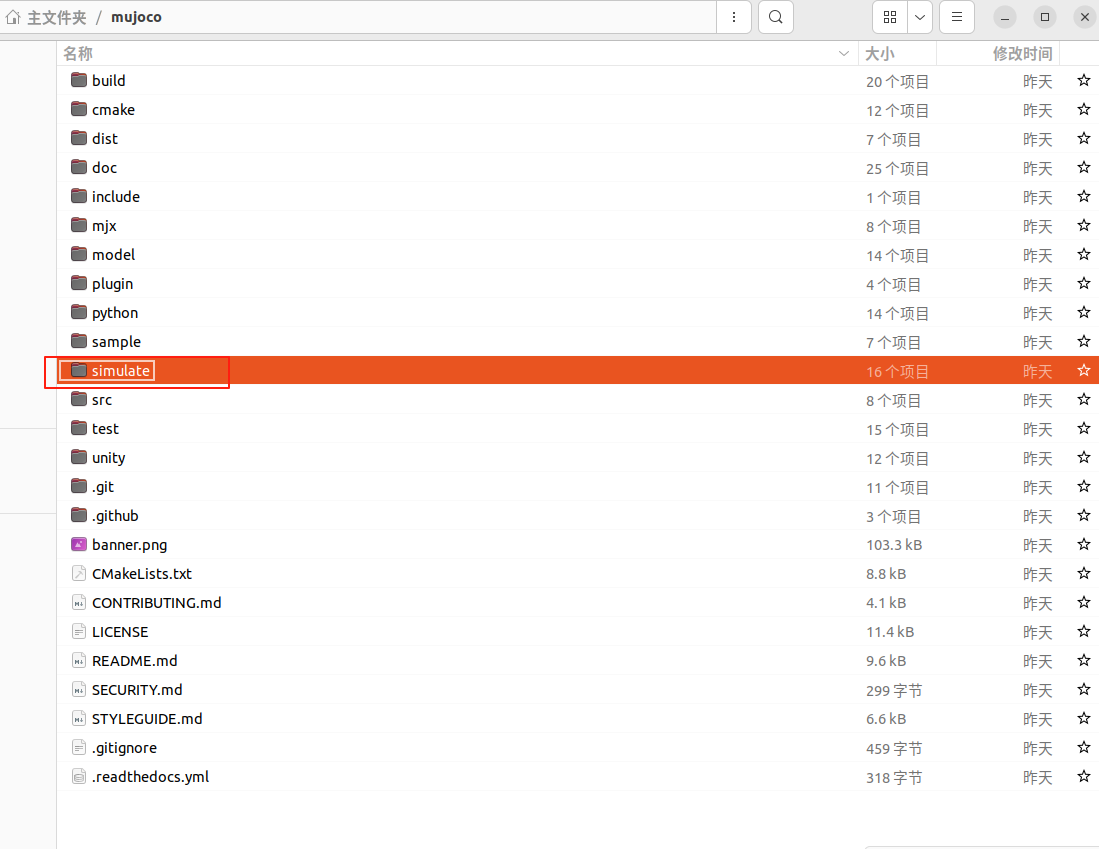
1. 找到mujoco的源码路径,找到simulate文件夹
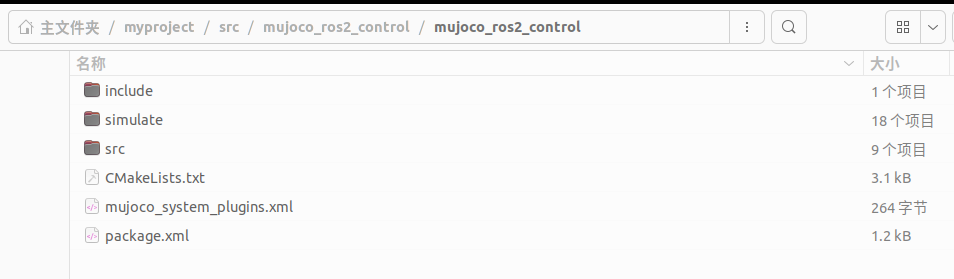
2. 把simulate文件夹完整copy到/your_workspace/src/mujoco_ros2_control/mujoco_ros2_control下,目录结构如图
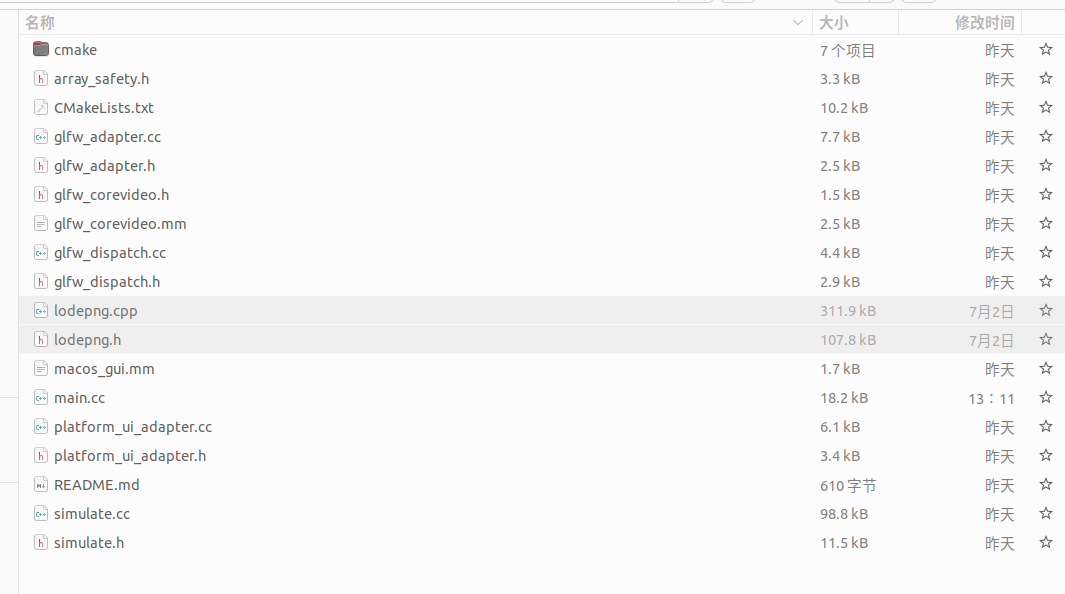
3. 下载lodepng依赖,是simulate包编译需要的一个依赖程序,主要用于处理png,mujoco官方包里没有这个https://github.com/lvandeve/lodepng/
git下来之后解压找到lodepng.cpp和lodepng.h,单独把这两个复制到simulate文件夹下就可以,simulate完整版长这样
4. 配置主循环,打开main.cc,因为现在是希望用这个main.cc代替原来的主循环mujoco_ros2_control_node.cpp,也就是它除了要实现官方原定义的UI渲染,还要实现ros2 controller manager的加载和仿真步进,因此做三处修改:
第一步,头部导入mujoco_ros2_control.hpp,并创建将来用于加载控制器的静态指针
#if defined(mjUSEUSD)
#include <mujoco/experimental/usd/usd.h>
#endif
#include <mujoco/mujoco.h>
#include "glfw_adapter.h"
#include "simulate.h"
#include "array_safety.h"
// 增加如下两行,用于 PhysicsLoop 访问 mujoco_control
#include "mujoco_ros2_control/mujoco_ros2_control.hpp"
static mujoco_ros2_control::MujocoRos2Control* g_mujoco_control = nullptr;
第二步,修改void PhysicsLoop函数,确保每次步进我们的控制器也被更新,完整的函数程序如下,主要就是加了两行g_mujoco_control->update和executor.spin_some(); 保证ros2、mujoco仿真环境、mujoco仿真UI的时钟保持一致
void PhysicsLoop(mj::Simulate& sim, rclcpp::executors::MultiThreadedExecutor& executor) {
// cpu-sim syncronization point
std::chrono::time_point<mj::Simulate::Clock> syncCPU;
mjtNum syncSim = 0;
// run until asked to exit
while (!sim.exitrequest.load()) {
if (sim.droploadrequest.load()) {
sim.LoadMessage(sim.dropfilename);
mjModel* mnew = LoadModel(sim.dropfilename, sim);
sim.droploadrequest.store(false);
mjData* dnew = nullptr;
if (mnew) dnew = mj_makeData(mnew);
if (dnew) {
sim.Load(mnew, dnew, sim.dropfilename);
// lock the sim mutex
const std::unique_lock<std::recursive_mutex> lock(sim.mtx);
mj_deleteData(d);
mj_deleteModel(m);
m = mnew;
d = dnew;
mj_forward(m, d);
} else {
sim.LoadMessageClear();
}
}
if (sim.uiloadrequest.load()) {
sim.uiloadrequest.fetch_sub(1);
sim.LoadMessage(sim.filename);
mjModel* mnew = LoadModel(sim.filename, sim);
mjData* dnew = nullptr;
if (mnew) dnew = mj_makeData(mnew);
if (dnew) {
sim.Load(mnew, dnew, sim.filename);
// lock the sim mutex
const std::unique_lock<std::recursive_mutex> lock(sim.mtx);
mj_deleteData(d);
mj_deleteModel(m);
m = mnew;
d = dnew;
mj_forward(m, d);
} else {
sim.LoadMessageClear();
}
}
// sleep for 1 ms or yield, to let main thread run
// yield results in busy wait - which has better timing but kills battery life
if (sim.run && sim.busywait) {
std::this_thread::yield();
} else {
std::this_thread::sleep_for(std::chrono::milliseconds(1));
}
// lock the sim mutex for the entire physics/control/ros2 update
const std::unique_lock<std::recursive_mutex> lock(sim.mtx);
// run only if model is present
if (m) {
// running
if (sim.run) {
bool stepped = false;
// record cpu time at start of iteration
const auto startCPU = mj::Simulate::Clock::now();
// elapsed CPU and simulation time since last sync
const auto elapsedCPU = startCPU - syncCPU;
double elapsedSim = d->time - syncSim;
// requested slow-down factor
double slowdown = 100 / sim.percentRealTime[sim.real_time_index];
// misalignment condition: distance from target sim time is bigger than syncMisalign
bool misaligned =
std::abs(Seconds(elapsedCPU).count()/slowdown - elapsedSim) > syncMisalign;
// out-of-sync (for any reason): reset sync times, step
if (elapsedSim < 0 || elapsedCPU.count() < 0 || syncCPU.time_since_epoch().count() == 0 ||
misaligned || sim.speed_changed) {
// re-sync
syncCPU = startCPU;
syncSim = d->time;
sim.speed_changed = false;
// run single step, let next iteration deal with timing
mj_step(m, d);
// --- 保证控制器 update 被周期性调用 ---
if (g_mujoco_control) {
g_mujoco_control->update();
}
// ROS2 spin_some 也在锁内
if (rclcpp::ok()) {
executor.spin_some();
}
const char* message = Diverged(m->opt.disableflags, d);
if (message) {
sim.run = 0;
mju::strcpy_arr(sim.load_error, message);
} else {
stepped = true;
}
}
// in-sync: step until ahead of cpu
else {
bool measured = false;
mjtNum prevSim = d->time;
double refreshTime = simRefreshFraction/sim.refresh_rate;
// step while sim lags behind cpu and within refreshTime
while (Seconds((d->time - syncSim)*slowdown) < mj::Simulate::Clock::now() - syncCPU &&
mj::Simulate::Clock::now() - startCPU < Seconds(refreshTime)) {
// measure slowdown before first step
if (!measured && elapsedSim) {
sim.measured_slowdown =
std::chrono::duration<double>(elapsedCPU).count() / elapsedSim;
measured = true;
}
// inject noise
sim.InjectNoise();
// call mj_step
mj_step(m, d);
// --- 保证控制器 update 被周期性调用 ---
if (g_mujoco_control) {
g_mujoco_control->update();
}
// ROS2 spin_some 也在锁内
if (rclcpp::ok()) {
executor.spin_some();
}
const char* message = Diverged(m->opt.disableflags, d);
if (message) {
sim.run = 0;
mju::strcpy_arr(sim.load_error, message);
} else {
stepped = true;
}
// break if reset
if (d->time < prevSim) {
break;
}
}
}
// save current state to history buffer
if (stepped) {
sim.AddToHistory();
}
}
// paused
else {
// run mj_forward, to update rendering and joint sliders
mj_forward(m, d);
sim.speed_changed = true;
}
}
}
}第三步,修改main函数启动循环及ros2节点,创建node节点来启动controller_manager,分离ros2控制线程和UI渲染主线程,可直接复制
int main(int argc, char** argv) {
// display an error if running on macOS under Rosetta 2
#if defined(__APPLE__) && defined(__AVX__)
if (rosetta_error_msg) {
DisplayErrorDialogBox("Rosetta 2 is not supported", rosetta_error_msg);
std::exit(1);
}
#endif
// print version, check compatibility
std::printf("MuJoCo version %s\n", mj_versionString());
if (mjVERSION_HEADER!=mj_version()) {
mju_error("Headers and library have different versions");
}
// scan for libraries in the plugin directory to load additional plugins
scanPluginLibraries();
#if defined(mjUSEUSD)
// If USD is used, print the version.
std::printf("OpenUSD version v%d.%02d\n", PXR_MINOR_VERSION, PXR_PATCH_VERSION);
#endif
mjvCamera cam;
mjv_defaultCamera(&cam);
mjvOption opt;
mjv_defaultOption(&opt);
mjvPerturb pert;
mjv_defaultPerturb(&pert);
// simulate object encapsulates the UI
auto sim = std::make_unique<mj::Simulate>(
std::make_unique<mj::GlfwAdapter>(),
&cam, &opt, &pert, /* is_passive = */ false
);
// ROS2 初始化
rclcpp::init(argc, argv);
auto ros_node = rclcpp::Node::make_shared(
"mujoco_ros2_control_node",
rclcpp::NodeOptions().automatically_declare_parameters_from_overrides(true));
// 读取 launch 传入参数
std::string mujoco_model_path;
if (ros_node->has_parameter("mujoco_model")) {
mujoco_model_path = ros_node->get_parameter("mujoco_model").as_string();
}
if (mujoco_model_path.empty()) {
for (int i = 1; i < argc; ++i) {
std::string arg = argv[i];
if (arg.size() > 4 && (arg.substr(arg.size()-4) == ".xml" || arg.substr(arg.size()-4) == ".mjb")) {
mujoco_model_path = arg;
break;
}
}
}
if (mujoco_model_path.empty()) {
std::cerr << "ERROR: No MuJoCo model path found! Please set 'mujoco_model' ROS2 parameter, or pass .xml/.mjb file as argument." << std::endl;
return 1;
}
const char* filename = mujoco_model_path.c_str();
// 1. 先定义 executor,后面传递给物理线程
rclcpp::executors::MultiThreadedExecutor executor;
// 2. 启动物理线程加载模型和数据和推进仿真
std::thread physicsthreadhandle([&]() {
PhysicsThread(sim.get(), filename, executor);
});
// 2. 主线程等待 d 就绪
std::cout << "[MuJoCo] 主线程: 等待物理线程加载模型和数据..." << std::endl;
while (!d && rclcpp::ok() && !sim->exitrequest.load()) {
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
if (!d) {
std::cerr << "[MuJoCo] 主线程: 等待 d 超时或被中断,退出" << std::endl;
if (physicsthreadhandle.joinable()) physicsthreadhandle.join();
return 1;
}
std::cout << "[MuJoCo] 主线程: m/d 已就绪,初始化控制器和 ROS2 executor" << std::endl;
// 3. m/d 就绪后再初始化控制器和 executor
mujoco_ros2_control::MujocoRos2Control mujoco_control(ros_node, m, d);
g_mujoco_control = &mujoco_control;
mujoco_control.init();
executor.add_node(ros_node);
// 4. 主线程只负责 UI 渲染
std::cout << "[MuJoCo] 主线程: 进入 sim->RenderLoop() (UI 事件循环)" << std::endl;
sim->RenderLoop();
physicsthreadhandle.join();
mj_deleteData(d);
mj_deleteModel(m);
return 0;
}5. 打开Cmakelist.txt,设置新主程序的依赖,这里叫它simulate_main
file(GLOB SIMULATE_SRC
"${CMAKE_CURRENT_SOURCE_DIR}/simulate/*.cc"
"${CMAKE_CURRENT_SOURCE_DIR}/simulate/lodepng.cpp"
)
add_executable(simulate_main
${SIMULATE_SRC}
src/mujoco_ros2_control.cpp
src/mujoco_rendering.cpp
src/mujoco_cameras.cpp
)
ament_target_dependencies(simulate_main ${THIS_PACKAGE_DEPENDS})
target_link_libraries(simulate_main
${MUJOCO_LIB}
glfw
)
target_include_directories(simulate_main
PUBLIC
${CMAKE_CURRENT_SOURCE_DIR}/simulate
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>
${MUJOCO_INCLUDE_DIR}
${EIGEN3_INCLUDE_DIR}
${CMAKE_CURRENT_SOURCE_DIR}/src
${CMAKE_CURRENT_SOURCE_DIR}/simulate
)
install(TARGETS
simulate_main
DESTINATION lib/${PROJECT_NAME})6. 最后,launch的时候的启动改成用simulate_main就好了
node_mujoco_ros2_control = Node(
package='mujoco_ros2_control',
executable='simulate_main',
output='screen',
parameters=[
robot_description,
controller_config_file,
{'mujoco_model_path': os.path.join(mujoco_ros2_control_demos_path, 'mujoco_xml', 'my_mujoco_arm.xml')},
]
)最后你的仿真环境就能达到这种原生态效果: