代码主要功能
该代码实现了无人机(UAV)三维路径规划,通过多种智能优化算法在复杂地形和威胁区域中寻找最优飞行路径。核心功能包括:
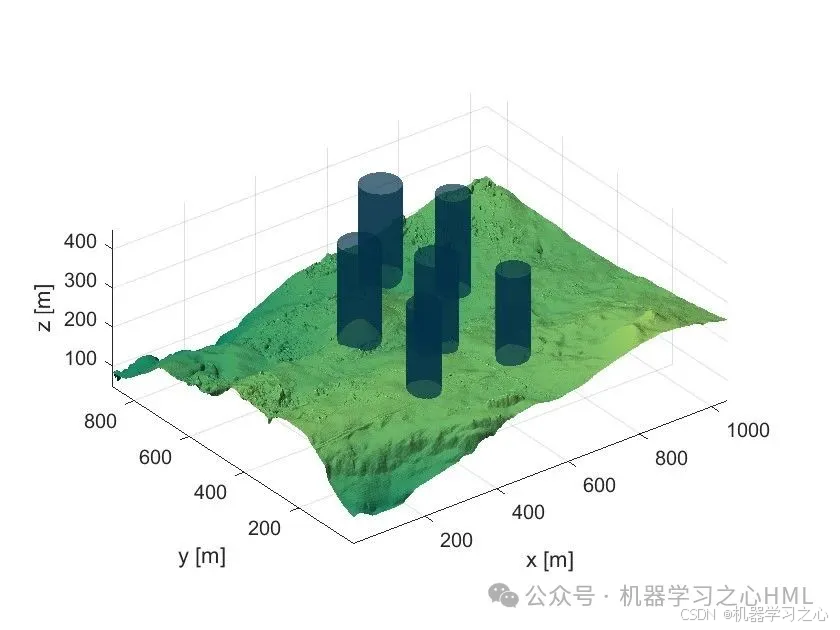
- 构建包含地形高度、威胁区域的三维地图环境
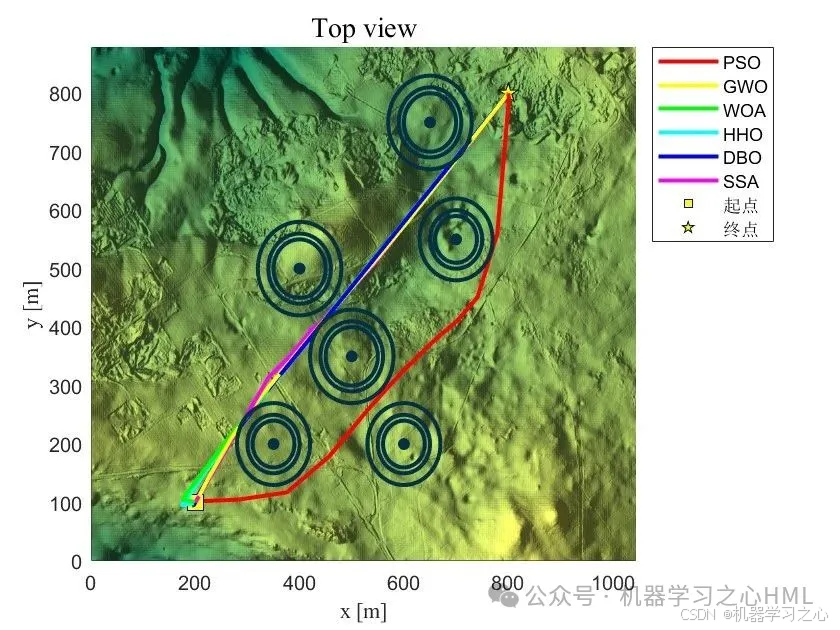
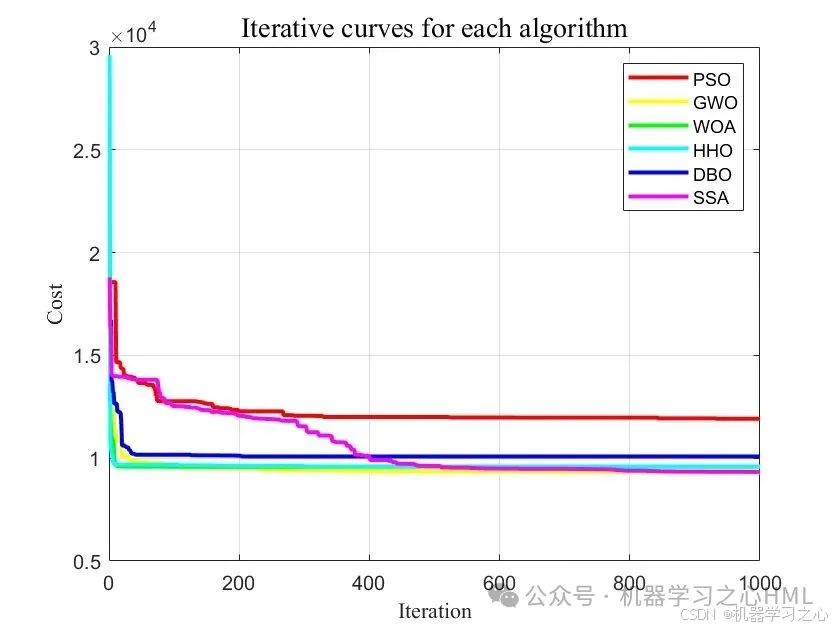
- 使用(PSO粒子群算法/GWO灰狼优化算法/WOA鲸鱼算法/HHO哈里斯鹰优化算法/DBO蜣螂优化算法/SSA麻雀搜索算法)进行路径优化
- 评估路径的成本(长度、威胁规避、高度约束、平滑度)
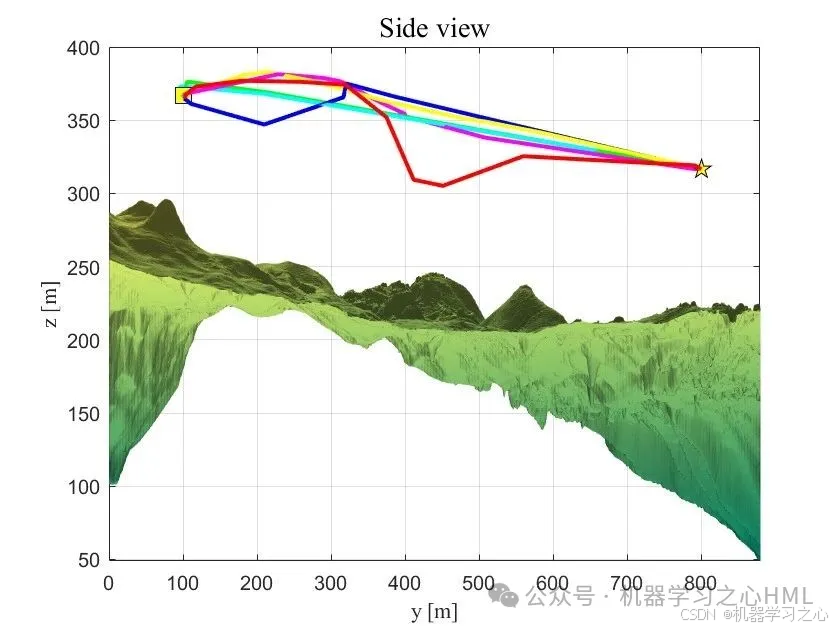
- 可视化比较不同算法的优化结果
算法步骤
初始化环境
- 清理工作空间,加载工具箱
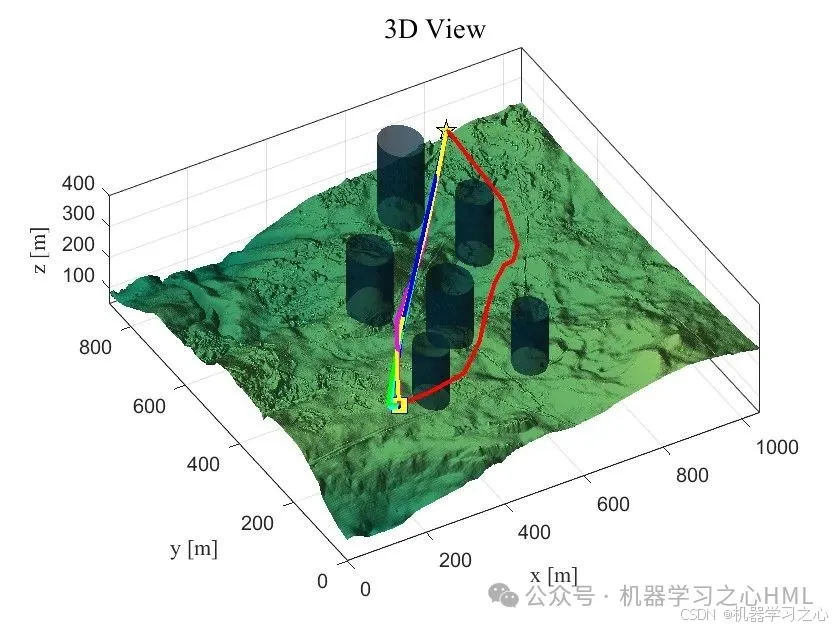
- 设置起点(200,100,150)、终点(800,800,150)
- 选择地图类型(map_select)和复杂度(map_complexity)
- 定义航点数(flight_num=10)
问题建模
- 调用
Create_Select_Model()生成地形高度矩阵(H)和威胁区域 - 设定解空间边界(VarMin/VarMax):
- 直角坐标系:x∈[xmin,xmax], y∈[ymin,ymax], z∈[zmin,zmax]
- 球坐标系:r∈[0, 2×起点终点距离/航点数], 角度受限±π/4
- 调用
优化算法求解
并行运行六种算法(参数统一):SearchAgents_no = 100; % 种群规模 Max_iteration = 1000; % 迭代次数 [算法]_Curve, [算法]_fitness, [算法]_chorm = 算法名(lb,ub,dim,fobj,...)结果分析
- 收集各算法的收敛曲线(Curve)和最优路径(Chorm)
- 调用
Draw_results()可视化路径和收敛曲线
技术路线
- 路径表示:航点用球坐标(𝑟,𝜓,𝜑)编码,转换为直角坐标(𝑥,𝑦,𝑧)
- 优化框架:多算法对比,共享目标函数
CostFunction() - 约束处理:通过惩罚函数(如碰撞惩罚∞)处理威胁/高度约束
成本函数原理
总成本 = 𝟏𝟎×𝑭𝟏 + 𝟏𝟎𝟎×𝑭𝟐 + 𝟏𝟎×𝑭𝟑 + 𝟓𝟎×𝑭𝟒
| 成本项 | 计算公式 | 说明 |
|---|---|---|
| 𝑭𝟏(长度) | ∑‖𝑃ₖ₊₁ - 𝑃ₖ‖ | 路径总长度 |
| 𝑭𝟐(威胁) | ∑𝚝𝚑𝚛𝚎𝚊𝚝_𝚌𝚘𝚜𝚝 | 威胁区域惩罚(见下方详解) |
| 𝑭𝟑(高度) | ∑⎮𝑧ₖ - (zₘₐₓ+zₘᵢₙ)/2⎮ | 偏离安全高度惩罚 |
| 𝑭𝟒(平滑) | ∑⎮θₜᵤᵣₙ⎮ + ⎮θ꜀ₗᵢₘꜝ⎮ | 转弯角/爬升角>45°时惩罚 |
威胁成本计算逻辑:
if 距离 > (威胁半径+无人机半径+安全距离): cost=0
elif 距离 < (威胁半径+无人机半径): cost=∞ # 碰撞
else: cost = (安全边界) - 实际距离
关键参数设定
| 参数 | 值 | 说明 |
|---|---|---|
flight_num |
10 | 路径航点数 |
SearchAgents_no |
100 | 每种算法的种群规模 |
Max_iteration |
1000 | 最大迭代次数 |
drone_size |
10 | 无人机等效半径(米) |
danger_dist |
20 | 威胁安全距离(米) |
turning_max |
45° | 最大允许转弯角 |
climb_max |
45° | 最大允许爬升角变化量 |
运行环境
软件:MATLAB2023B
应用场景
- 军事领域:无人机在雷达/防空威胁区域中的突防路径规划
- 物流配送:城市楼宇间无人机送货的避障路径优化
- 电力巡检:高压输电线走廊的三维安全巡线
- 灾害救援:山区复杂地形中的紧急物资投送路径设计