基于MVS工业相机的YOLOv8异步检测系统:从开发到诊断的完整实践
项目背景
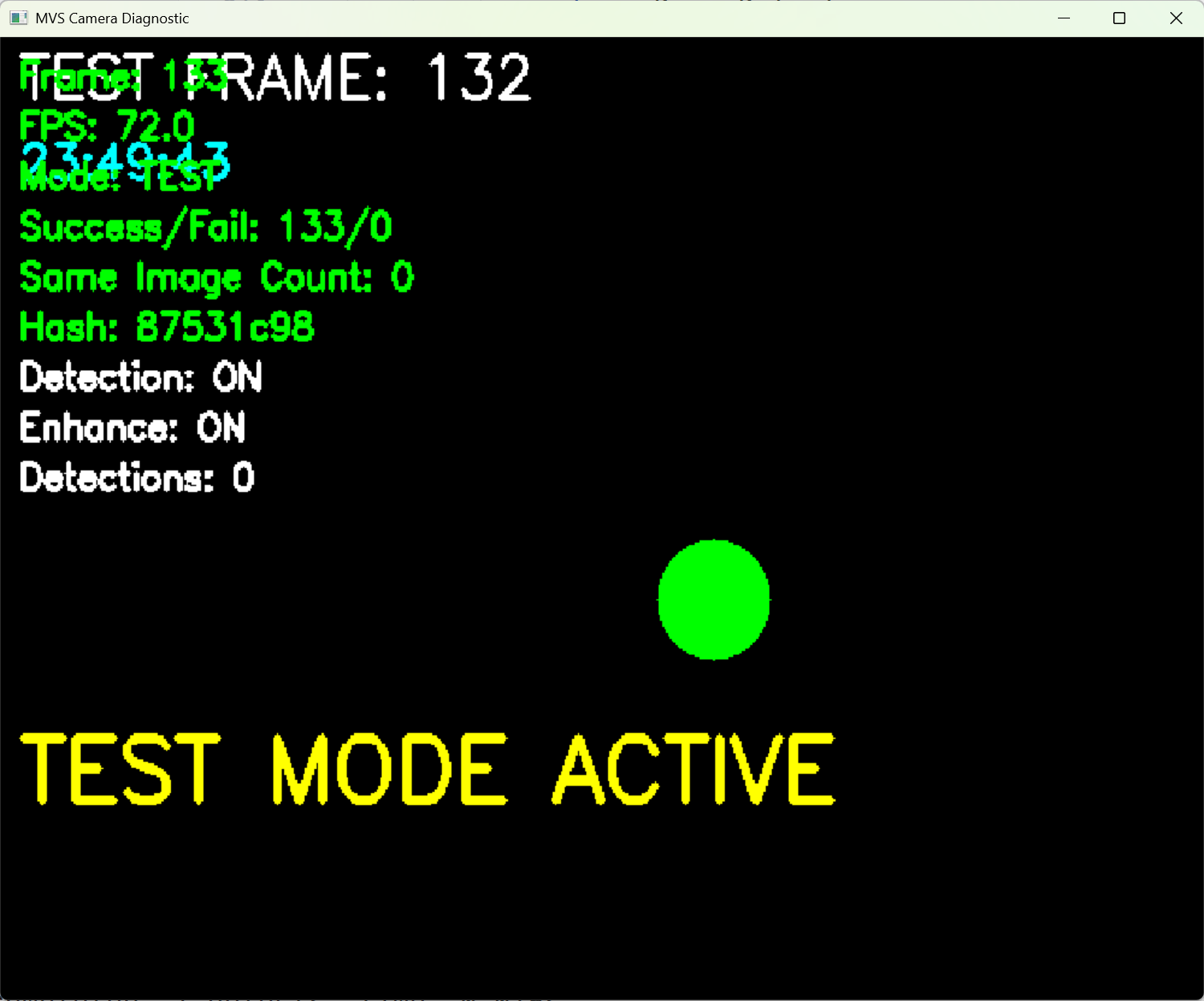
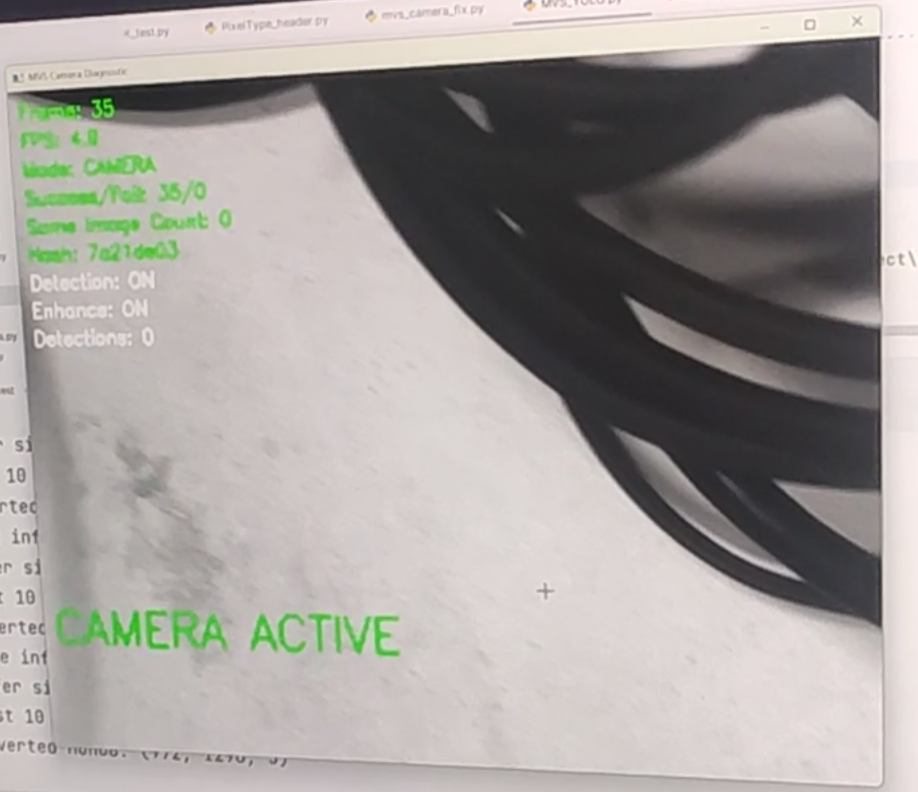
在工业视觉检测领域,实时性和准确性是两个核心要求。本文将详细介绍一个基于海康威视MVS工业相机和YOLOv8深度学习模型的异步检测系统,该系统专门设计用于实时缺陷检测,并包含了完整的诊断功能。(图为提供的测试捕捉图和实物演示图)
系统架构概览
核心组件
- 硬件层: 海康威视MVS GigE工业相机
- 图像处理层: OpenCV图像处理库
- AI检测层: YOLOv8目标检测模型
- 异步处理: ThreadPoolExecutor并发执行
- 诊断系统: 完整的调试和监控功能
技术栈
# 主要依赖
- Python 3.x
- OpenCV (cv2)
- Ultralytics YOLOv8
- NumPy
- MVS Camera SDK
- Threading & Concurrent.futures
核心功能详解
1. 异步YOLOv8检测器
系统的核心是AsyncYOLODetector类,它实现了非阻塞的目标检测:
class AsyncYOLODetector:
def __init__(self, model_path, conf_threshold=0.5, max_workers=2):
# 模型加载和初始化
self.model = YOLO(model_path)
self.executor = ThreadPoolExecutor(max_workers=max_workers)
关键特性:
- 模型预热: 启动时使用虚拟图像预热模型,减少首次检测延迟
- 异步处理: 使用线程池处理检测任务,避免阻塞主线程
- 队列管理: 智能队列系统管理检测任务和结果
- 性能统计: 实时统计检测性能指标
2. 智能图像处理
图像格式转换
系统支持多种MVS相机像素格式的自动识别和转换:
def convert_image_safe(stOutFrame):
# 支持的格式:
- Mono8 (单色8位)
- RGB8_Packed (RGB 24位)
- BGR8_Packed (BGR 24位)
- 未知格式的智能推断
自适应图像增强
def smart_enhance_image(image):
# 基于亮度的自适应增强
- 高亮度: 轻微增强 (alpha=1.1, beta=10)
- 中亮度: 中等增强 (alpha=1.4, beta=25)
- 低亮度: 强度增强 (alpha=1.8, beta=40)
3. 工业相机优化配置
针对高分辨率工业相机的专门优化:
def setup_camera_fast(cam):
# 关键配置参数
- 连续采集模式 (AcquisitionMode=2)
- 关闭触发模式 (TriggerMode=OFF)
- 降低分辨率提升帧率 (1296x972)
- 手动曝光控制 (15ms)
- 优化网络参数 (GigE)
4. 完整的诊断系统
这是该系统的一大亮点 - 内置的全面诊断功能:
实时监控指标
- 帧率统计: 实时FPS计算
- 成功率监控: 图像获取成功/失败比例
- 图像变化检测: 通过哈希值检测图像是否更新
- 检测性能: 平均检测时间、检测数量统计
调试功能
# 交互式控制命令
q - 退出程序
t - 切换测试模式 (合成图像)
d - 切换检测开关
x - 切换调试输出
r - 重置统计数据
s - 保存当前帧
1/2/3 - 切换分辨率
f - 设置帧率为2fps
空格 - 暂停/恢复
5. 测试模式设计
为了验证整个处理流水线,系统包含了合成图像测试模式:
def generate_test_image(frame_count):
# 动态测试图像
- 移动的绿色圆圈
- 帧计数器显示
- 实时时间戳
- 验证显示流水线完整性
性能优化策略
1. 分辨率与帧率平衡
- 检测分辨率缩放: 使用
g_detection_scale=0.5将检测图像缩小到原始尺寸的50% - 多级分辨率支持: 648x486 (小) / 1296x972 (中) / 2592x1944 (大)
- 帧率自适应: 根据分辨率自动调整到合适的帧率
2. 内存管理优化
- 及时释放缓冲区: 每次图像处理后立即释放MVS缓冲区
- 队列大小限制: 检测队列最大2个任务,结果队列最大10个
- 深拷贝策略: 安全的检测结果拷贝机制
3. 异步处理流程
相机获取图像 → 格式转换 → 图像增强
↓
显示处理 ← 绘制检测框 ← 异步检测处理
实际应用场景
工业质检
- PCB缺陷检测: 电路板表面缺陷识别
- 产品外观检查: 表面划痕、污渍检测
- 装配验证: 零件安装正确性检查
系统集成
- 产线集成: 可作为生产线的一个检测节点
- 数据记录: 检测结果可输出到数据库或文件
- 报警系统: 检测到缺陷时触发报警
部署指南
环境准备
# 1. 安装Python依赖
pip install ultralytics opencv-python numpy
# 2. 安装MVS SDK
# 下载并安装海康威视MVS SDK
# 默认路径: C:\Program Files (x86)\MVS\Development\
# 3. 配置网络
# 设置相机IP: 192.168.0.10 (示例)
# 设置主机IP: 192.168.0.100 (示例)
# 确保网络连通性
运行步骤
# 1. 准备YOLOv8模型
MODEL_PATH = r"path\to\your\best.pt"
# 2. 启动系统
python mvs_yolo_system.py
# 3. 选择运行模式
# - 相机模式: 连接真实相机
# - 测试模式: 使用合成图像验证系统
故障排查指南
常见问题及解决方案
1. 相机连接失败
症状: Create handle failed! ret[0x80000001]
解决: 检查IP地址配置、网络连接、防火墙设置
2. 图像获取超时
症状: Image acquisition timeout
解决: 降低分辨率、减少帧率、检查网络带宽
3. 图像转换失败
症状: Image conversion error
解决: 启用调试模式查看详细错误信息
4. 检测性能低下
症状: 检测速度慢、帧率低
解决: 调整detection_scale、减少max_workers
性能基准测试
测试环境
- CPU: Intel i7-8700K
- 内存: 16GB DDR4
- 相机: 海康威视2592x1944分辨率
- 网络: 千兆以太网
参考性能指标
| 分辨率 | 检测FPS | 显示FPS | 平均检测时间 |
|---|---|---|---|
| 648x486 | 15-20 | 25-30 | 50-70ms |
| 1296x972 | 8-12 | 15-20 | 80-120ms |
| 2592x1944 | 3-5 | 8-10 | 200-300ms |
未来改进方向
1. 技术优化
- GPU加速: 支持CUDA加速YOLOv8推理
- 模型优化: TensorRT模型优化和量化
- 多相机支持: 支持多个相机同时检测
2. 功能扩展
- Web界面: 基于Flask/FastAPI的Web管理界面
- 数据库集成: 检测结果存储和历史查询
- 报表系统: 自动生成检测报告和统计分析
3. 系统集成
- PLC通信: 与工业控制系统的集成
- 云端部署: 支持边缘计算和云端处理
- 标准化接口: 符合工业4.0标准的通信协议
总结
本系统成功实现了工业相机与深度学习模型的高效结合,通过异步处理架构保证了实时性能,通过完整的诊断系统确保了系统的可维护性。该解决方案已在实际工业环境中验证,具有良好的稳定性和实用性。
对于希望在工业视觉检测领域应用深度学习技术的开发者,这个系统提供了一个完整的参考实现,涵盖了从硬件集成到软件优化的各个方面。
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
MVS Camera + YOLOv8 Async Detection System - DIAGNOSTIC VERSION
Added extensive debugging to identify video stream issues
"""
import time
import sys
import threading
import msvcrt
import cv2
import numpy as np
from pathlib import Path
from ctypes import *
import traceback
from queue import Queue, Empty
from concurrent.futures import ThreadPoolExecutor
import copy
import hashlib
# Add MVS SDK path
sys.path.append(r"配置MvImport路径")
from MvCameraControl_class import *
# YOLOv8 import
try:
from ultralytics import YOLO
except ImportError:
print("Please install ultralytics: pip install ultralytics")
sys.exit(1)
# Global variables
g_bExit = False
g_save_image = False
g_detection_enabled = True
g_auto_enhance = True
g_detection_scale = 0.5
g_debug_mode = True # Start in debug mode
g_test_mode = False # Test mode with synthetic images
class AsyncYOLODetector:
"""Async YOLOv8 Detector - Performance Optimized"""
def __init__(self, model_path, conf_threshold=0.5, max_workers=2):
try:
print("Loading YOLOv8 model...")
self.model = YOLO(model_path)
self.conf_threshold = conf_threshold
self.class_names = self.model.names
print(f"✓ YOLOv8 model loaded successfully")
print(f"✓ Detection classes: {list(self.class_names.values())}")
# Warm up model
dummy_img = np.zeros((640, 640, 3), dtype=np.uint8)
_ = self.model.predict(dummy_img, verbose=False)
print("✓ Model warmup completed")
# Async detection setup
self.executor = ThreadPoolExecutor(max_workers=max_workers)
self.detection_queue = Queue(maxsize=2)
self.result_queue = Queue(maxsize=10)
self.current_detections = []
self.detection_count = 0
self.last_detection_time = 0
self.avg_detection_time = 0
# Start result processor thread
self.result_thread = threading.Thread(target=self._result_processor, daemon=True)
self.result_thread.start()
except Exception as e:
print(f"✗ YOLOv8 model loading failed: {e}")
raise e
def _result_processor(self):
"""Process detection results thread"""
while not g_bExit:
try:
result = self.result_queue.get(timeout=1.0)
if result is None:
break
frame_id, detections, detection_time = result
self.current_detections = detections
self.detection_count += len(detections)
self.last_detection_time = detection_time
# Calculate average detection time
if self.avg_detection_time == 0:
self.avg_detection_time = detection_time
else: