一、学术亮点:把 “手感” 写进控制律
触觉闭环控制领域再添新成果!西班牙阿利坎特大学 AUROVA 团队在 IEEE ETFA 2025 发表的论文《Touch-based Effector Control to Track 3D Surfaces》中,首次证实仅通过Contactile 3×3 阵列式三轴触觉力传感器(9 触点)PapillArray,即可实时估计曲面法向与曲率 —— 无需预先扫描物体或依赖 CAD 模型,真正实现Kinova Gen3机器人 “盲触” 复杂曲面。
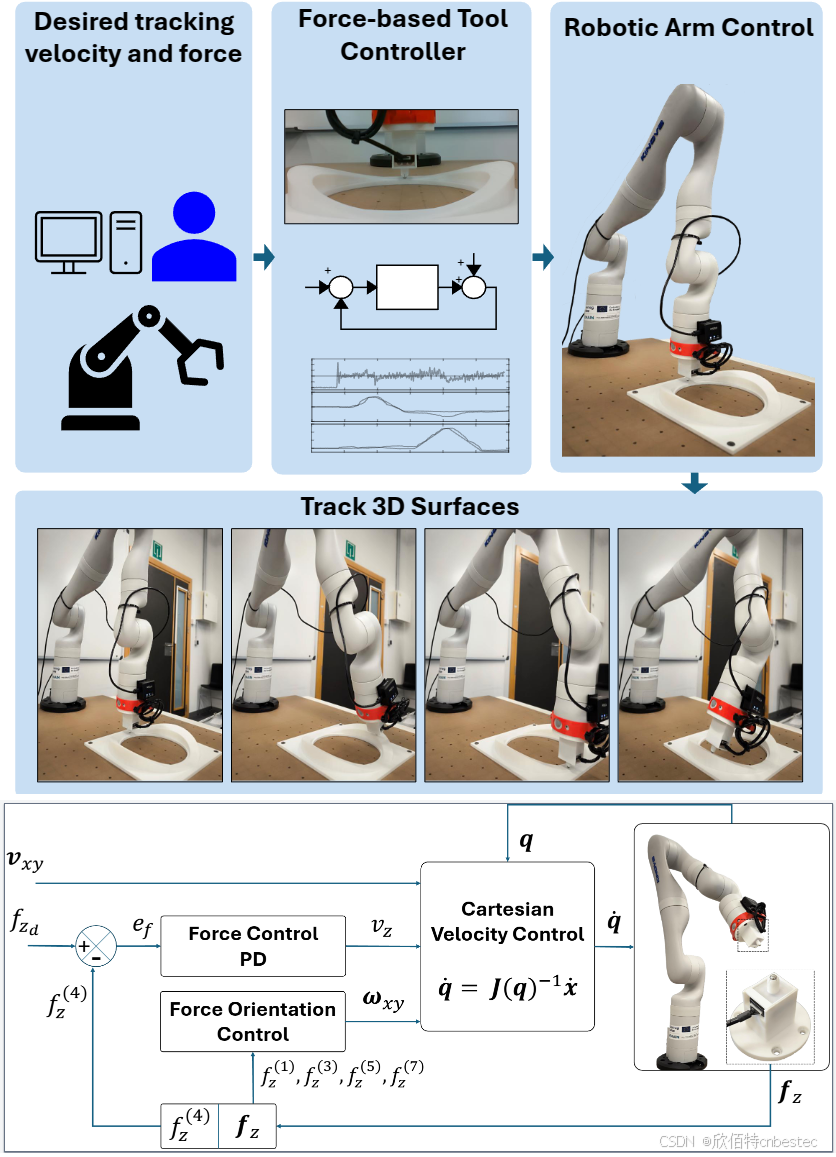
该研究的核心突破在于力 - 姿耦合双环控制器:
- 法向力环:以恒定 5N 力跟踪曲面,在真实皮鞋曲面测试中,力控误差仅为 0.229±0.169N,精度远超传统机械操作;
- 姿态环:基于触觉传感器实时反馈的曲面法向,动态调整末端执行器姿态,让机器人实现 “边摸边走” 的自适应运动。
更值得关注的是其 “零轨迹规划” 特性:系统直接输出 Cartesian 速度指令,无需预设路径即可适配任意未知曲面,为抛光、检测等工业场景提供 “零示教” 解决方案。
二、硬件组合:为什么选 Kinova Gen3 + Contactile?
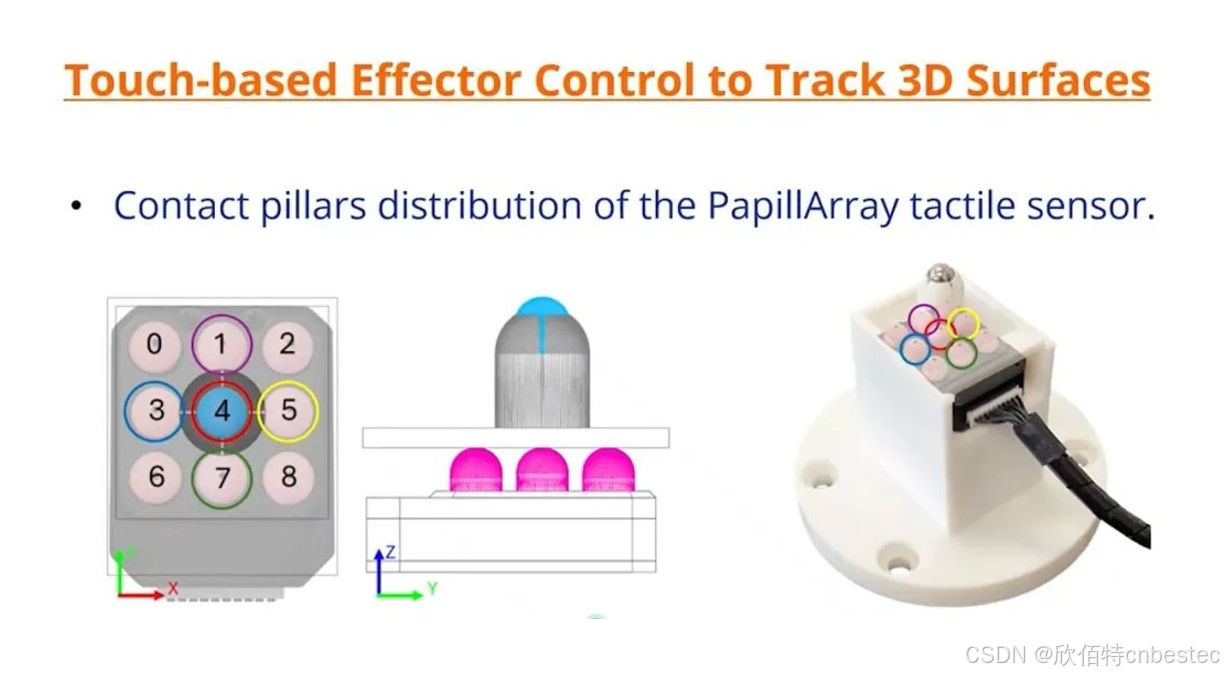
【触觉感知的 “指尖”:Contactile 阵列式三轴触觉力传感器PapillArray】
Contactile传感器在力控取放分拣、灵巧操作等方面应用
看似小巧的传感器(24.0×30.6×12.8mm),实则是机器人的 “仿人手触感中枢”:内部 9 个传感元件按 3×3 阵列排布(元件直径 6.0mm,中心间距 7.0mm),配合红外光学检测原理,能将曲面的微小变化转化为全维度触觉数据。
其核心性能参数完全匹配论文实验需求:
- 局部感知精度:X、Y 方向可测 ±1mm 位移(分辨率<0.01mm),Z 方向达 ±2.5mm(分辨率<0.01mm),哪怕 0.01mm 的曲面起伏都能被捕捉;
- 力与扭矩范围:局部 X、Y 方向力 ±4N(分辨率<0.05N)、Z 方向 15N(分辨率<0.05N),全局力扩展至 X、Y±9N、Z60N,搭配 ±0.125Nm(X、Y)及 ±0.050Nm(Z)扭矩测量,精准支撑论文中 5N 恒定力控制需求;
- 实时性保障:通过 USB 接口传输数据(电流消耗<200mA),1000Hz 高频采样让机器人每秒获取 1000 次三维力、位移、振动及滑动信息,实现 “边摸边算” 的闭环控制。
更智能的是,它无需预先编程抓取参数:基于内置算法实时计算摩擦力与最优握力,论文中 “零示教” 抛光正是依托这一特性 —— 机器人通过触觉反馈自主调整力度,在未知曲面上稳定维持接触力精度。搭配可选的 C++ 库(支持 Linux/Windows)或 ROS 节点(Linux 系统),可轻松集成到 Kinova 机械臂系统,而 Windows 可视化软件能实时显示各元件数据,方便实验调试。
【灵活操作的 “臂膀”:Kinova Gen3 仿生力控机械臂】
Kinova Gen3 产品介绍
7 轴全关节扭矩传感器如同给每个关节装上 “智能体重秤”,8.2kg 的超轻机身让搬运如同拎笔记本般轻松。基座内置控制柜,一条网线即可接入 ROS 系统(支持 ROS Noetic)—— 论文作者正是通过这一组合,实时接收触觉数据并转化为 Cartesian 速度指令,完成 “边摸边走” 的零示教实验。
三、实验成果可视化
- 图 1:红色箭头为传感器 “摸” 到的曲面方向,绿色轨迹为机器人实时生成的抛光路径。无需提前编程,仅靠触觉反馈就能贴着鞋跟精准打磨,实现毫米级贴合的抛光动作。

- 图 2:20 次重复实验中,平均力控误差为 0.229N±0.169N,100% 数据点落在 ±0.4N 以内,完全满足鞋面抛光的精度要求。
四、潜在落地场景
- 鞋楦 / 鞋底自动抛光:单双处理仅需 30 秒,节省 80% 人工成本;
- 碳纤维曲面质检:通过触觉 “扫描” 生成缺陷高度图,替代传统 3D 线激光检测;
- 康复辅具定制:同一套算法可直接应用于石膏阳模打磨,适配个性化需求;
- 小批量珠宝高光:Kinova Gen3 + PapillArray 在 1㎡工位内可柔性切换多款戒指曲面,无需重复调试。
结语:触觉重新定义机器人边界
当 Contactile 阵列式三轴触觉传感器的 “微米级感知” 与 Kinova Gen3 的 “关节级灵活” 相遇,皮鞋曲面上 0.229N 的恒定力不仅是一次实验成功,更标志着柔性制造范式的全新开端。未来,这对 “指尖与臂膀” 将走进更多产业,用触觉智慧让复杂曲面操作变得简单而精准。
【版权声明】
本文部分技术内容及数据援引自论文《Touch-based Effector Control to Track 3D Surfaces》(arXiv:2503.07135v2)。
论文主页:https://aurova-projects.github.io/Touch-based_3d_surfaces/
代码仓库:https://github.com/AUROVA-LAB/aurova_grasping
如需转载,请完整保留本声明并注明原始出处。
✅感谢论文的核心贡献者:
Edison Velasco-Sanchez(埃迪森·贝拉斯科-桑切斯)
Julio Castaño-Amoros(胡里奥·卡斯塔尼奥-阿莫罗斯)
Pablo Gil(巴勃罗·吉尔)
Fernando Torres(费尔南多·托雷斯)
西班牙阿利坎特大学自动化、机器人与计算机视觉研究组(AUROVA)
【文末彩蛋】《考工记》的当代践行者
《考工记》有云:“智者创物,巧者述之;审曲面势,以饬五材。” 两千年前的造物箴言,藏着古人对 “顺势而为” 的深刻理解,如今正被科技以新的方式延续 ——
- Contactile 阵列式三轴触觉传感器的 9 触点,如匠人磨透的指尖,以 0.01mm 的分辨率 “审” 尽曲面毫厘;
- Kinova Gen3 7 轴力控机械臂的灵活关节,循着触觉反馈 “饬” 出精准轨迹。
从 0.229N 的力控精度到工厂里的柔性操作,这对 “搭档” 把 “创物” 的巧思、“审势” 的精准,都化作了可感知的技术温度。
从古籍中的造物理念,到车间里的智能操作,变的是工具:从凿刀到传感器,从木臂到机械轴;不变的是内核 —— 对 “巧” 与 “准” 的执着,对 “致用” 的追求。
原来《考工记》的智慧从不是故纸堆里的文字,而是能在科技中生长的根,扎进每一次精准触碰,每一段自适应轨迹里。