在终端执行
gnome-session-properties
这个是带有图型化页面的设置开机自启动的软件
没有这个软件的可以直接下载
sudo apt update
sudo apt install gnome-startup-applications一般都有,ubunutu自带的

右边有添加,
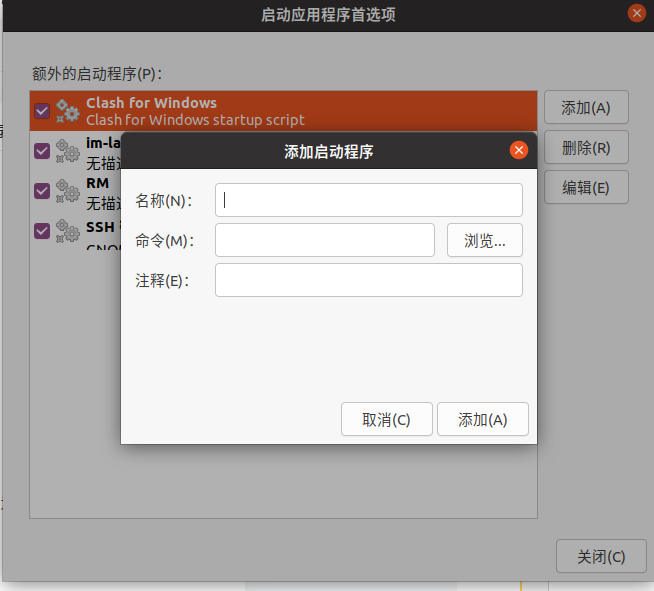
名称和注释随便写,只需要把命令选择一个.sh文件就可以了
 设置这种的sh文件就可以了
设置这种的sh文件就可以了
不断电测试
gnome-session-quit --logout --no-prompt终端输入这个指令就可以了
参考sh文件
#!/bin/bash
# -------------------------------------------------------
# 一键启动 MID-360 + FAST_LIO2 + RM 节点
# 每个终端都在 ~/RM-Navigation/ROS_MID360 目录下执行
# -------------------------------------------------------
# 0. 提前给串口权限(需 sudo 免密,已配置)
sudo chmod 666 /dev/ttyUSB0 2>/dev/null
sudo chmod 666 /dev/ttyACM0 2>/dev/null
# 1) roscore
gnome-terminal --disable-factory --title="roscore" \
-- bash -ic "\
cd ~/RM-Navigation/ROS_MID360 && \
source /opt/ros/noetic/setup.bash && \
roscore; \
exec bash" &
sleep 2
# 2) livox 驱动
gnome-terminal --disable-factory --title="livox_driver" \
-- bash -ic "\
cd ~/RM-Navigation/ROS_MID360 && \
source /opt/ros/noetic/setup.bash && \
source ~/mid360/Mid_livox_ros_driver2/devel/setup.bash && \
roslaunch livox_ros_driver2 msg_MID360.launch; \
exec bash" &
sleep 1
# 3) FAST_LIO
gnome-terminal --disable-factory --title="FAST_LIO" \
-- bash -ic "\
cd ~/RM-Navigation/ROS_MID360 && \
source /opt/ros/noetic/setup.bash && \
source ~/mid360/Mid_livox_ros_driver2/devel/setup.bash && \
roslaunch fast_lio mapping_mid360.launch; \
exec bash" &
sleep 1
# 4) RM 节点
gnome-terminal --disable-factory --tab --title="RM" \
-- bash -ic "\
cd ~/RM-Navigation/ROS_MID360 && \
source /opt/ros/noetic/setup.bash && \
source ~/mid360/Mid_livox_ros_driver2/devel/setup.bash && \
python3 send_mid360.py; \
exec bash" &
wait