基于STM32智能阳台监控系统
(程序+原理图+元件清单)
功能介绍
具体功能:
1.采用STM32作为主控芯片实现检测和控制;
2.通过光敏电阻采集光线,将当前光线值在LCD1602显示,低于50%控制LED亮,高于50%时LED熄灭;
3.两个RTS5000红外探头(3CM检测)其中一个测试有物体靠近蜂鸣器报警,同时控制继电器打开3S后关闭;
4.根据光线强度控制遮阳篷自动调节用步进电机表示,光强值小于30%反转4S表示关闭,在30%-70%之间则正转2S表示开一半,高于70%则再正转2S表示完全开;
5.热释红外传感器检测到有人体在移动蜂鸣器报警(该功能可以通过按键设置开启或关闭表示布防和撤防);
程序
/***********************************************************
内容:1、采用STM32作为主控芯片实现检测和控制;
2、通过光敏电阻采集光线,将当前光线值在LCD1602显示,低于50%控制LED亮,高于50%时LED熄灭;
3、两个RTS5000红外探头(3CM检测)其中一个测试有物体靠近蜂鸣器报警,同时控制继电器打开3S后关闭;
4、根据光线强度控制遮阳篷自动调节用步进电机表示,光强值小于30%反转4S表示关闭,在30%-70%之间则正转2S表示开一半,高于70%则再正转2S表示完全开;
5、热释红外传感器检测到有人体移动在蜂鸣器报警(该功能可以通过按键设置开启或关闭表示布防和撤防);
***********************************************************/
#include "stm32f10x.h"
#include "1602.h"
#include "delay.h"
#include "usart.h"
#include "timer.h"
#include "Expansion.h"
#include "adc.h"
#include "led.h"
#include "key.h"
u8 Temp[6]={" "};
u8 flag=0,flag1=0;
/***********************************************************/
int main(void)
{
u16 adcx;
A1602_GPIO_Configuration();
delay_init();
Adc_Init();
NVIC_Configuration(); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
LED_Init();
KEY_Init();
lcd_init();
TIM3_Int_Init(4999,7199); //10Khz的计数频率,计数到5000为1s
while(1)
{
adcx=Get_Adc_Average(ADC_Channel_7,10);
hex_char(Temp,adcx);
if(Temp[4]>50) led=1;
else led=0;
if((Temp[4]<30)&&(flag!=2))
{
dis_str(0x40,9,"G<30% ");
Temporary=0;
while(Temporary<4)
Positive();
flag=2;
}
if((Temp[4]>30)&&(Temp[4]<70)&&(flag==2))
{
dis_str(0x40,9,"70%>G>30%");
Temporary=0;
while(Temporary<2)
Anti();
flag=1;
}
if((Temp[4]>70)&&(flag==1))
{
dis_str(0x40,9,"G>70% ");
Temporary=0;
while(Temporary<2)
Anti();
flag=0;
}
if(!key)
{
flag1=!flag1;
while(!key);
}
if(flag1)
{
dis_str(0x4d,3,"ON ");
if(!IR1) spk=0;
else spk=1;
}
else dis_str(0x4d,3,"OFF");
if(IR) { dis_str(10,6,"JD:off"); spk=1; }
else { dis_str(10,6,"JD:on "); spk=0; Temporary=0; while(Temporary<3); }
dis_str(0x00,4,Temp);
}
}
#include "delay.h"
#include "sys.h"
//////////////////////////////////////////////////////////////////////////////////
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos 使用
#endif
static u8 fac_us=0;//us延时倍乘数
static u16 fac_ms=0;//ms延时倍乘数
#ifdef OS_CRITICAL_METHOD //如果OS_CRITICAL_METHOD定义了,说明使用ucosII了.
//systick中断服务函数,使用ucos时用到
void SysTick_Handler(void)
{
OSIntEnter(); //进入中断
OSTimeTick(); //调用ucos的时钟服务程序
OSIntExit(); //触发任务切换软中断
}
#endif
//初始化延迟函数
//当使用ucos的时候,此函数会初始化ucos的时钟节拍
//SYSTICK的时钟固定为HCLK时钟的1/8
//SYSCLK:系统时钟
void delay_init()
{
#ifdef OS_CRITICAL_METHOD //如果OS_CRITICAL_METHOD定义了,说明使用ucosII了.
u32 reload;
#endif
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //选择外部时钟 HCLK/8
fac_us=SystemCoreClock/8000000; //为系统时钟的1/8
#ifdef OS_CRITICAL_METHOD //如果OS_CRITICAL_METHOD定义了,说明使用ucosII了.
reload=SystemCoreClock/8000000; //每秒钟的计数次数 单位为K
reload*=1000000/OS_TICKS_PER_SEC;//根据OS_TICKS_PER_SEC设定溢出时间
//reload为24位寄存器,最大值:16777216,在72M下,约合1.86s左右
fac_ms=1000/OS_TICKS_PER_SEC;//代表ucos可以延时的最少单位
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //开启SYSTICK中断
SysTick->LOAD=reload; //每1/OS_TICKS_PER_SEC秒中断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
#else
fac_ms=(u16)fac_us*1000;//非ucos下,代表每个ms需要的systick时钟数
#endif
}
#ifdef OS_CRITICAL_METHOD //使用了ucos
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=nus*fac_us; //需要的节拍数
tcnt=0;
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow;//这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break;//时间超过/等于要延迟的时间,则退出.
}
};
}
//延时nms
//nms:要延时的ms数
void delay_ms(u16 nms)
{
if(OSRunning==TRUE)//如果os已经在跑了
{
if(nms>=fac_ms)//延时的时间大于ucos的最少时间周期
{
OSTimeDly(nms/fac_ms);//ucos延时
}
nms%=fac_ms; //ucos已经无法提供这么小的延时了,采用普通方式延时
}
delay_us((u32)(nms*1000)); //普通方式延时,此时ucos无法启动调度.
}
#else//不用ucos时
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{
u32 temp;
SysTick->LOAD=nus*fac_us; //时间加载
SysTick->VAL=0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
//延时nms
//注意nms的范围
//SysTick->LOAD为24位寄存器,所以,最大延时为:
//nms<=0xffffff*8*1000/SYSCLK
//SYSCLK单位为Hz,nms单位为ms
//对72M条件下,nms<=1864
void delay_ms(u16 nms)
{
u32 temp;
SysTick->LOAD=(u32)nms*fac_ms;//时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
#endif
#include "sys.h"
#include "usart.h"
//////////////////////////////////////////////////////////////////////////////////
*******//完整资料
******//微信公众号:木子单片机
//////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
/*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
USART_DeInit(USART1); //复位串口1
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断
USART_Cmd(USART1, ENABLE); //使能串口
}
#if EN_USART1_RX //如果使能了接收
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
#ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使用ucosII了.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
// if(USART_RX_STA&0x4000)//接收到了0x0d
// {
// if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
// else USART_RX_STA|=0x8000; //接收完成了
// }
// else //还没收到0X0D
// {
// if(Res==0x0d)USART_RX_STA|=0x4000;
// else
// {
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA|=0x8000; //接收完成了
// USART_RX_STA++;
// if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
// }
// }
}
}
#ifdef OS_TICKS_PER_SEC //如果时钟节拍数定义了,说明要使用ucosII了.
OSIntExit();
#endif
}
#endif
硬件设计
使用元器件:
单片机:STM32F103;
瓷片电容;二极管;
XH2.54-5P;3P直排座;
轻触开关;自锁开关;
1602液晶;4P直排针;
10K电位器;10K电阻;
光敏电阻;8M晶振;
5V-3.3V稳压芯片;
32.768KHZ晶振;
设计资料
01原理图
本系统原理图采用Altium Designer19设计,具体如图!
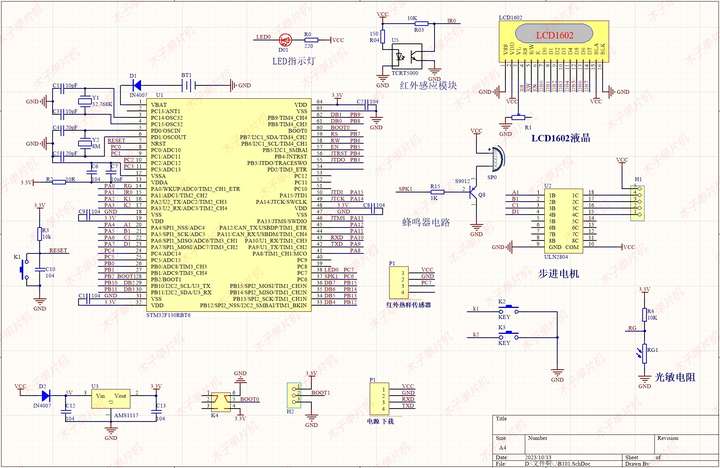
添加图片注释,不超过 140 字(可选)
02程序
本设计使用软件keil5版本编程设计!具体如图!
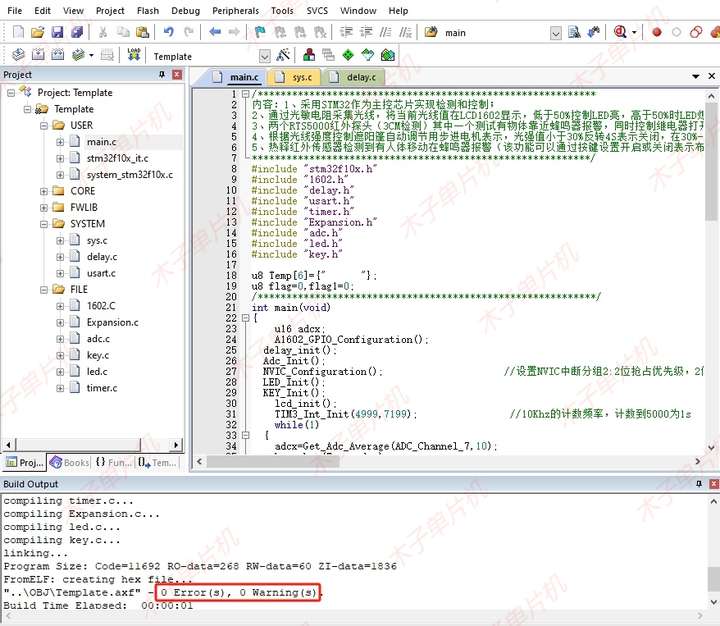
添加图片注释,不超过 140 字(可选)
03设计资料
全部资料包括程序(含注释)、AD原理图、元件清单等。具体内容如下,全网最全! !
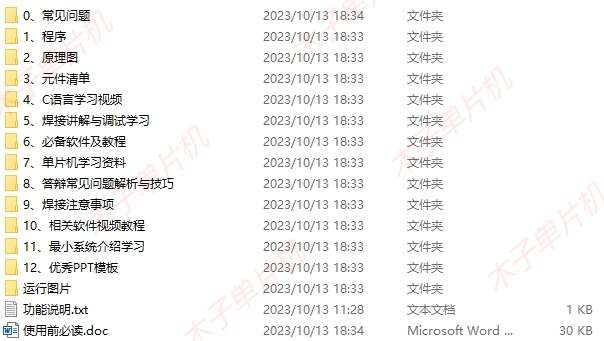
添加图片注释,不超过 140 字(可选)
点赞分享一起学习成长。