1.摘要
粒子群优化(PSO)算法在无人机(UAV)路径规划中具有潜力,但在复杂多威胁的环境中,传统PSO算法容易陷入局部最优。为提高算法在复杂环境中的性能,本文提出了具备自适应调整参数、圆柱向量和差分进化算子的粒子群算法(ACVDEPSO)。在ACVDEPSO中,粒子的速度被转换为圆柱向量,以便更有效地进行路径搜索。同时,算法的参数根据粒子的时间和适应度自动调整。此外,差分进化算子的引入有效减少了局部最优的发生概率,加速了算法的收敛速度。
2.数学模型
常见UAV模型,略~
3.改进粒子群算法
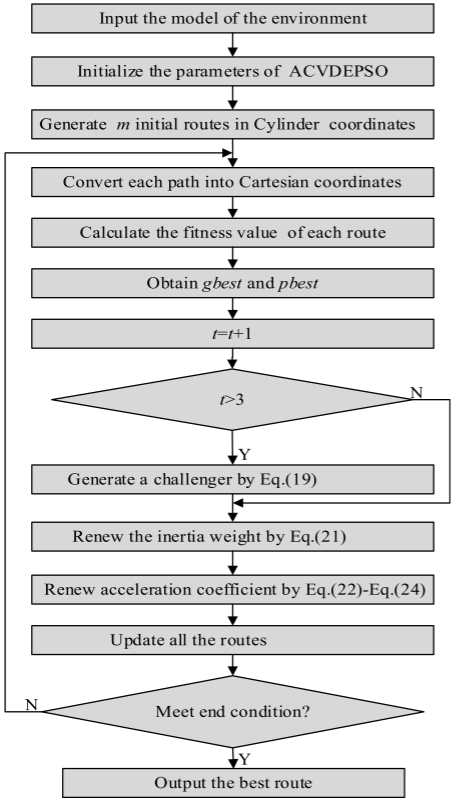
为提高粒子群优化(PSO)算法的效率,本文提出了一种自适应参数策略,结合粒子适应度、个体信息和演化时间,同时引入差分进化策略。在无人机路径规划中,采用圆柱坐标替代笛卡尔坐标来表示航路点:
P i = ( r i 1 , θ i 1 , z i 1 , r i 2 , θ i 2 , z i 2 , . . . , r i N , θ i N , z i N ) P_{i}=(r_{i1},\theta_{i1},z_{i1},r_{i2},\theta_{i2},z_{i2},...,r_{iN},\theta_{iN},z_{iN}) Pi=(ri1,θi1,zi1,ri2,θi2,zi2,...,riN,θiN,ziN)
将每个粒子视为一条飞行路径,相应的速度可用增量矢量表示:
Δ P i = ( Δ r i 1 , Δ θ i 1 , Δ z i 1 , Δ r i 2 , Δ θ i 2 , Δ z i 2 , … , Δ r i D , Δ θ i D , Δ z i D ) \Delta P_i=(\Delta r_{i1},\Delta\theta_{i1},\Delta z_{i1},\Delta r_{i2},\Delta\theta_{i2},\Delta z_{i2},\ldots,\Delta r_{iD},\Delta\theta_{iD},\Delta z_{iD}) ΔPi=(Δri1,Δθi1,Δzi1,Δri2,Δθi2,Δzi2,…,ΔriD,ΔθiD,ΔziD)
每个粒子的更新方程:
{ Δ q i j k + 1 = ω Δ q i j k + c 1 r 1 ( p i j k − q i j k ) + c 2 r 2 ( g j k − q i j k ) q i j k + 1 = q i j k + Δ q i j k + 1 , ( i = 1 , 2 , … , m ; j = 1 , 2 , … , N ) \begin{cases} \Delta q_{ij}^{k+1} = \omega \Delta q_{ij}^{k} + c_1 r_1 (p_{ij}^{k} - q_{ij}^{k}) + c_2 r_2 (g_{j}^{k} - q_{ij}^{k}) \\ q_{ij}^{k+1} = q_{ij}^{k} + \Delta q_{ij}^{k+1}, \quad (i = 1, 2, \dots, m; j = 1, 2, \dots, N) \end{cases} {Δqijk+1=ωΔqijk+c1r1(pijk−qijk)+c2r2(gjk−qijk)qijk+1=qijk+Δqijk+1,(i=1,2,…,m;j=1,2,…,N)
将航路点 W W W投影到 Oxy 平面上,可以将圆柱坐标转换为笛卡尔坐标:
{ x j = x j − 1 + r j cos θ i j y j = y j − 1 + r j sin θ i j z j = z j − 1 + Δ z j \begin{cases} x_j=x_{j-1}+r_j\cos\theta_{ij} \\ y_j=y_{j-1}+r_j\sin\theta_{ij} \\ z_j=z_{j-1}+\Delta z_j & \end{cases} ⎩
⎨
⎧xj=xj−1+rjcosθijyj=yj−1+rjsinθijzj=zj−1+Δzj
圆柱坐标 r r r和 θ \theta θ范围
为了加速搜索速度并使得生成的航路点均匀分布, r r r范围:
0 ≤ r ≤ 2 ∣ ∣ G − S ∣ ∣ N 0\leq r\leq\frac{2||G-S||}{N} 0≤r≤N2∣∣G−S∣∣
θ \theta θ范围:
θ min = arctan ( y G − y S x G − x S ) − θ r \theta_{\min}=\arctan\left(\frac{y_G-y_S}{x_G-x_S}\right)-\theta_r θmin=arctan(xG−xSyG−yS)−θr
θ max = arctan ( y G − y S x G − x S ) + θ r \theta_{\max}=\arctan\left(\frac{y_G-y_S}{x_G-x_S}\right)+\theta_r θmax=arctan(xG−xSyG−yS)+θr
引入差分进化算子,根据上一代的全局最优解生成新解:
q j k + 1 = g b j r 1 + r a n d ( 0 , 1 ) ⋅ ( g b j r 2 − g b j r 3 ) , ( k ≥ 3 , j = 1 , 2 , … , N ) q_{j}^{k+1}=gb_{j}^{r_{1}}+rand(0,1)\cdot(gb_{j}^{r_{2}}-gb_{j}^{r_{3}}),(k\geq3,j=1,2,\ldots,N) qjk+1=gbjr1+rand(0,1)⋅(gbjr2−gbjr3),(k≥3,j=1,2,…,N)
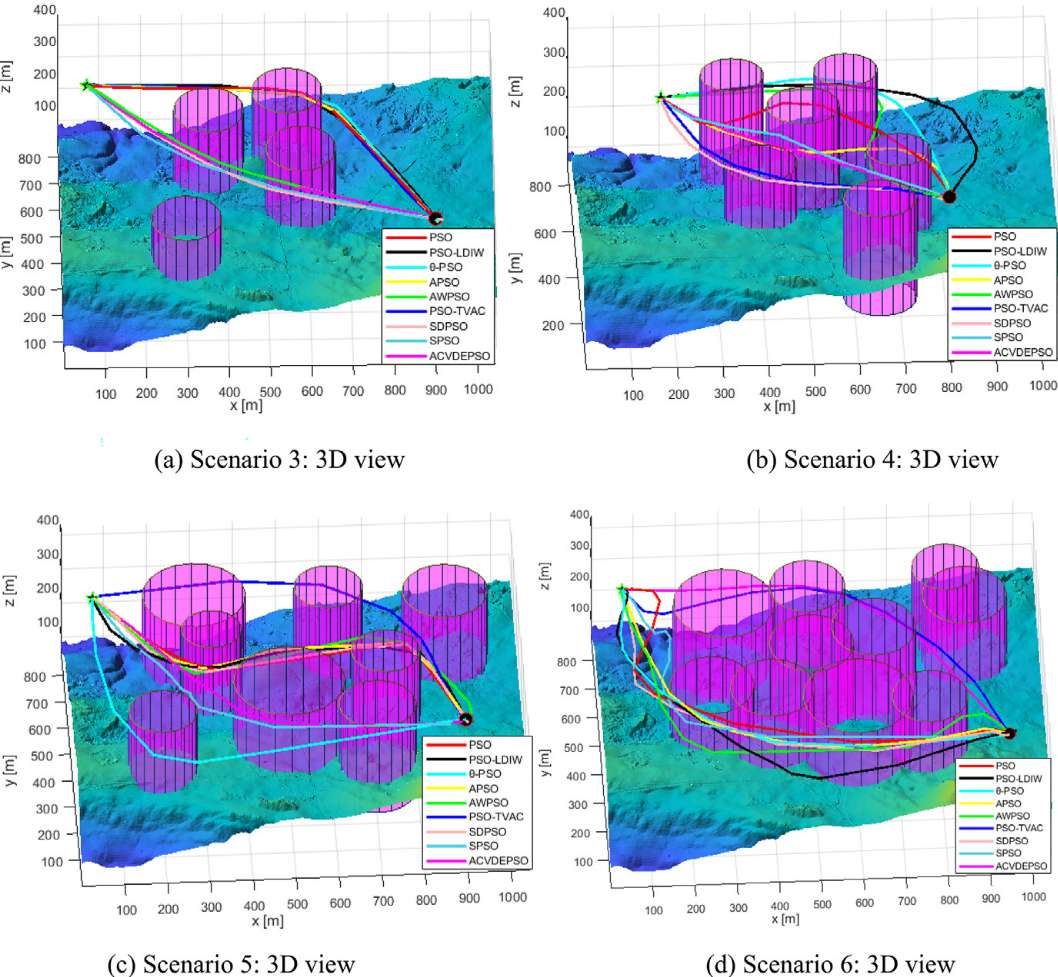
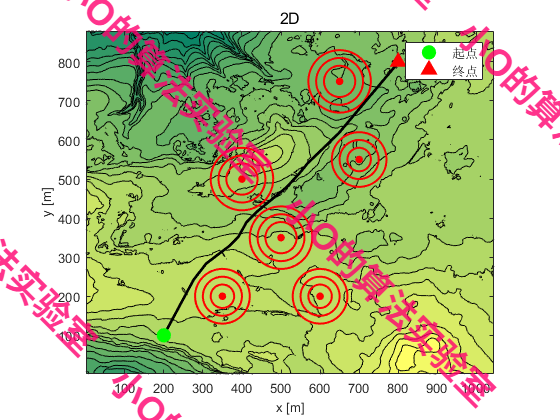
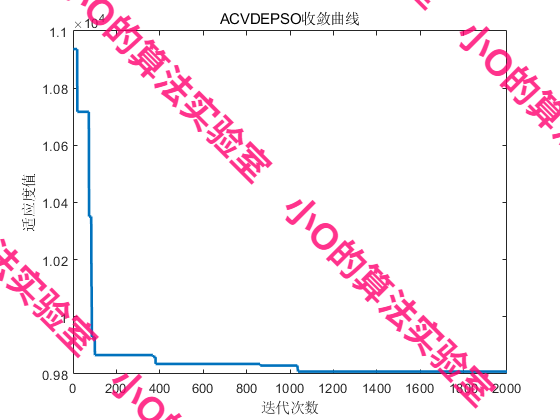
4.结果展示
5.参考文献
[1] Huang C, Zhou X, Ran X, et al. Adaptive cylinder vector particle swarm optimization with differential evolution for UAV path planning[J]. Engineering Applications of Artificial Intelligence, 2023, 121: 105942.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx