目录
1.打开GVINS配置文件visensor_left_f9p_config.yaml
终端命令:
roscore
rosrun dmvio_ros node calib=~/dmvio_ws/dm-vio/configs/camera.txt imuCalib=~/dmvio_ws/dm-vio/configs/camchain-gvins.yaml settingsFile=~/dmvio_ws/dm-vio/configs/euroc.yaml mode=1 nogui=0 preset=1 useimu=1 quiet=1 init_requestFullResetNormalizedErrorThreshold=0.8 init_pgba_skipFirstKFs=1
rosbag play xxx.bag
1.修改配置文件
打开GVINS配置文件visensor_left_f9p_config.yaml
路径在/GVINS/config/visensor_f9p/
修改相机内参文件
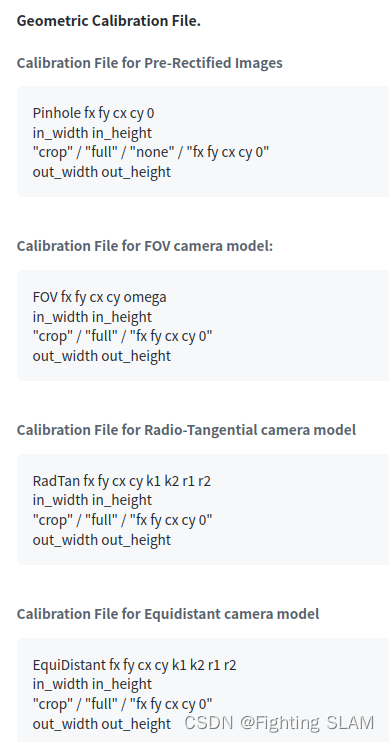
1.文件位置:/dm-vio/configs/camera.txt(来源如下)
2.终端输入:echo -e "458.654 457.296 367.215 248.375 -0.28340811 0.07395907 0.00019359 1.76187114e-05\n752 480\ncrop\n640 480\n" > camera.txt https://github.com/lukasvst/dm-vio-ros
3.将visensor_left_f9p_config.yaml中的gamma1,gamma2,u0,v0作为fx,fy,cx,cy的参数,将k1,k2,p1,p2替换为k1,k2,r1,r2的位置(后四个)
4.输入及输出的图像规格不变;
内参文件格式参考格式为
https://github.com/lukasvst/dm-vio/blob/master/src/dso/README.md
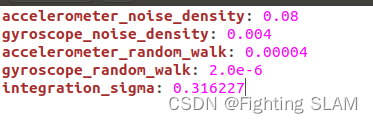
3.修改IMU参数文件
1.文件位置:/dm-vio/configs/euroc.yaml
2.可以另存为一个新的文件,我重命名并另存为imuGvins.yaml
3.将GVINS配置文件中关于IMU噪声的参数复制到imuGvins.yaml替换掉

参数复制到文件后:
4.修改IMU_Camere外参
1.configs中,打开4seasons_calib、tumvi_calib任意一个文件夹选择camchain.yaml并打开。
2.另存为并重命名文件camchain-gvins.yaml
3.复制visensor_left_f9p_config.yaml中外参数据替换camchain-gvins.yaml的T_cam_imu对应位置

5.运行DMVIO
roscore
rosrun dmvio_ros node calib=~/dmvio_ws/dm-vio/configs/camera.txt imuCalib=~/dmvio_ws/dm-vio/configs/camchain-gvins.yaml settingsFile=~/dmvio_ws/dm-vio/configs/euroc.yaml mode=1 nogui=0 preset=1 useimu=1 quiet=1 init_requestFullResetNormalizedErrorThreshold=0.8 init_pgba_skipFirstKFs=1
rosbag play sport.bag
具体路径根据个人实际进行更改
6.运行结果
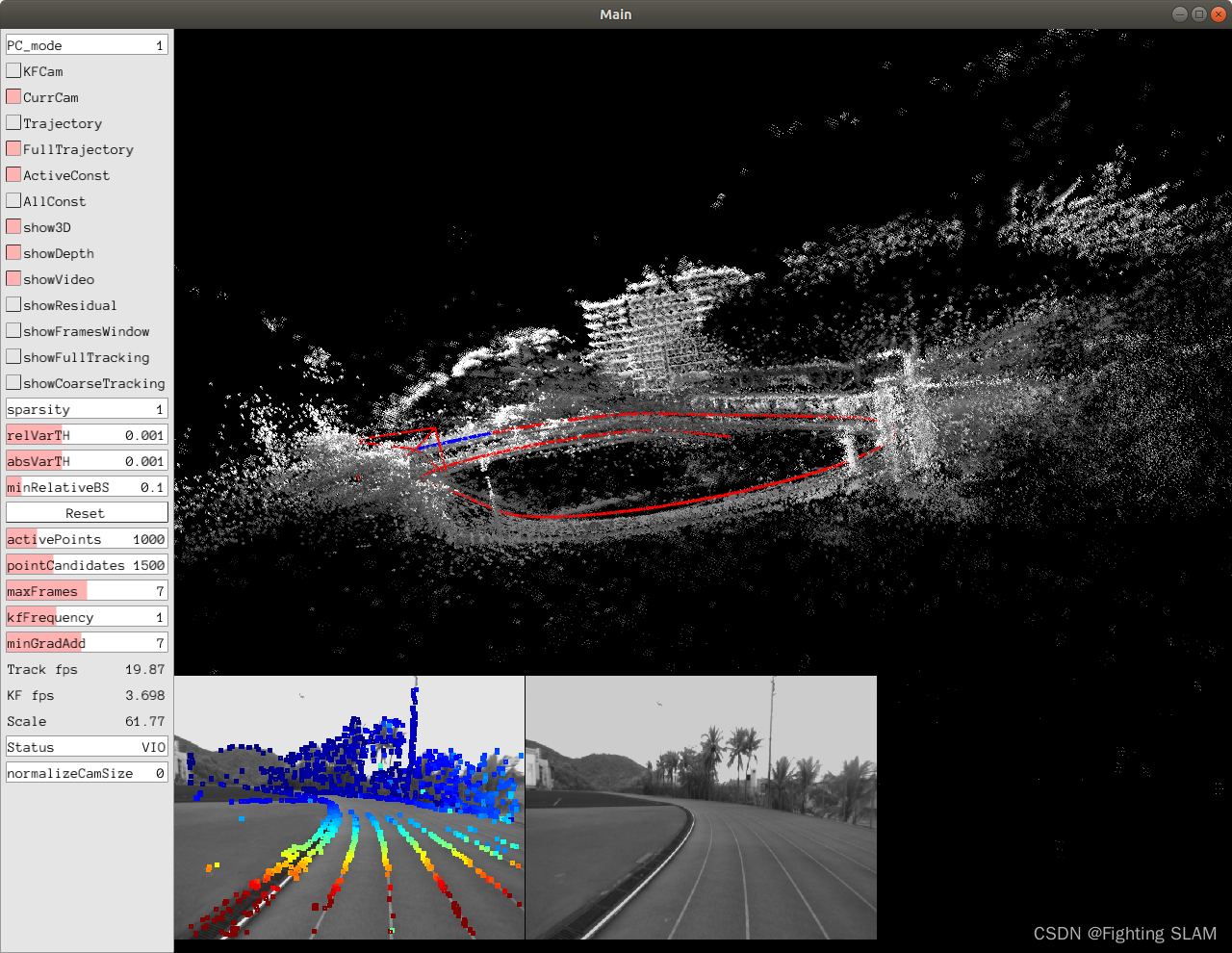
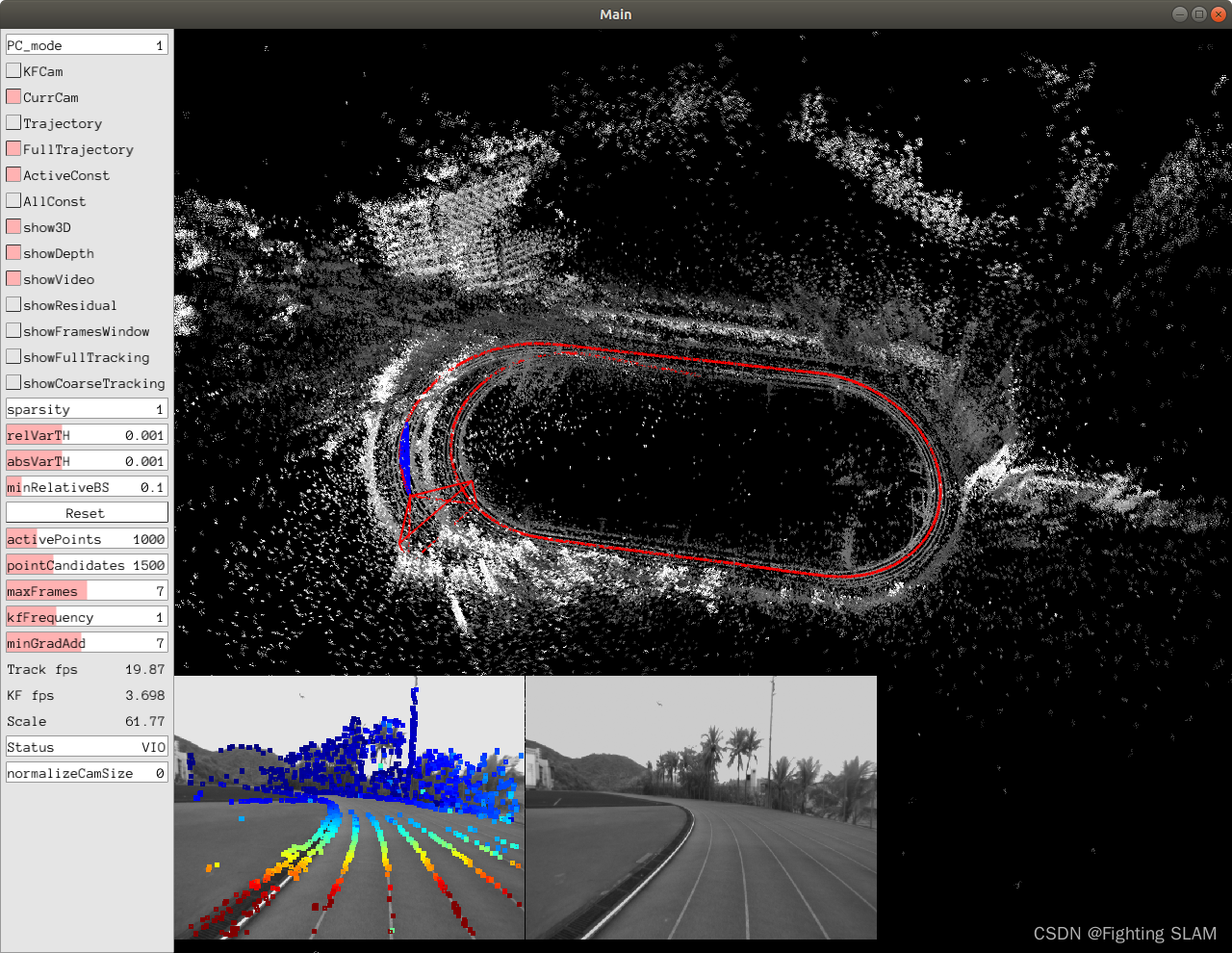
跑了一圈手动停止了rosbag
累积误差的原因,使得第二圈后误差明显
个人尝试,正在努力学习,欢迎讨论