这是本人嵌入式学习记录的第二期,仅作记录。
准备材料
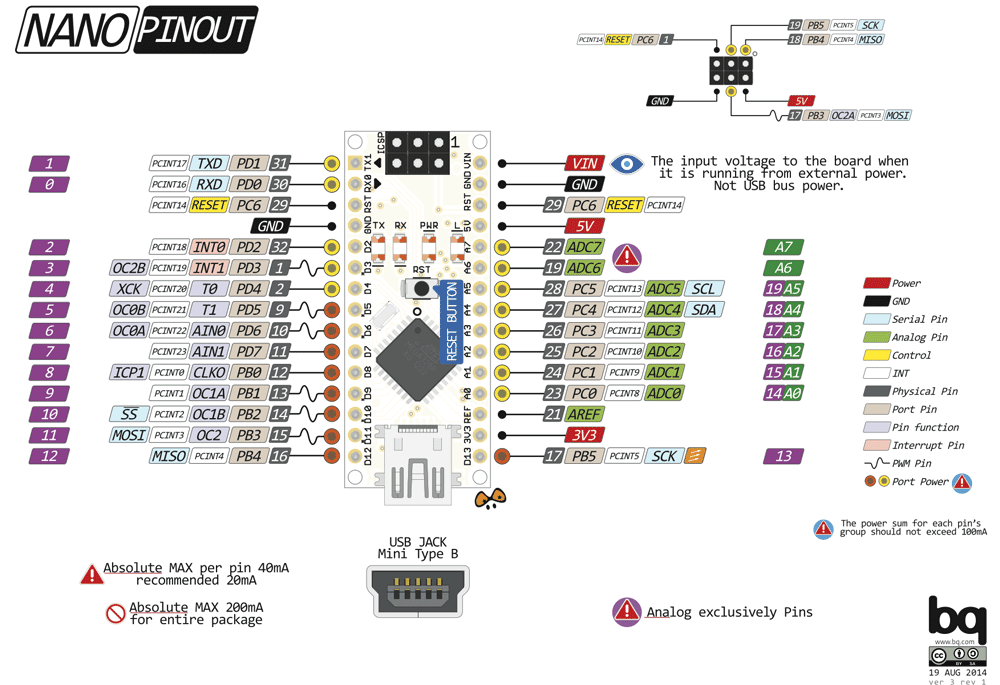
Arduino Nano开发板(拓展版)
Arduino Nano 是一款类似Arduino UNO的开发板。区别是Nano的尺寸更加小巧。Arduino Nano 是一款基于 ATmega328P的开发板。它可以直插面包板的 。Arduino Nano 与Arduino Uno十分类似。它与Uno的区别是Nano没有直流电压供电接口同时Nano通过Mini-B USB 接口与电脑连接。
主要技术参数
| 微控制器 | ATmega328P |
| 工作电压 | 5伏特 |
| Flash Memory(闪存) | 32 KB (ATmega328P) 其中由 0.5 KB用于系统引导(bootloader) |
| SRAM(静态存储器) | 2 KB (ATmega328P) |
| EEPROM | 1 KB (ATmega328P) |
| 模拟输入引脚 | 8个 |
| EEPROM | 1Kb |
| 输入/输出引脚直流电流 | 40 毫安 |
| 输入电压 | 7-12伏特 |
| 数字输入输出引脚 | 22个(其中有6个引脚可作为PWM引脚) |
| PWM引脚 | 6个 |
| 3.3V引脚电流 | 50 毫安 |
| 长 | 45 mm |
| 宽 | 18 mm |
| 重 | 7克 |
| 时钟频率 | 16 MHz |
开发板原理图
黑色胶布
黑色胶布用于搭建小车运行的“轨道”,选用黑色宽度18mm左右的即可。

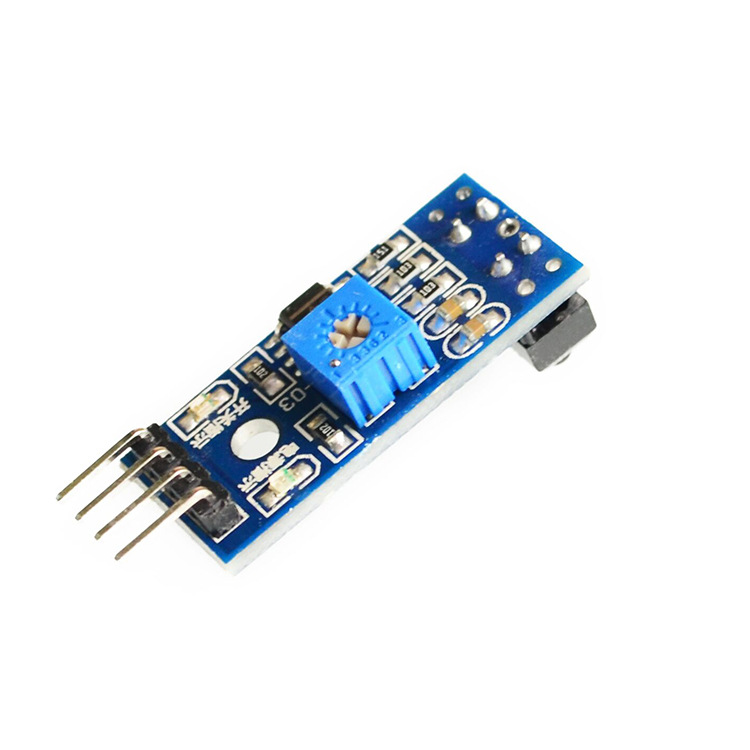
循迹模块
在此我们使用循迹模块TCRT5000,该模块体积小,灵敏度较高,还可以通过转动上面的电位器来调节检测范围。关于循迹控制,希望后期能加上PID进行高精度的控制,现在这里立个坑。
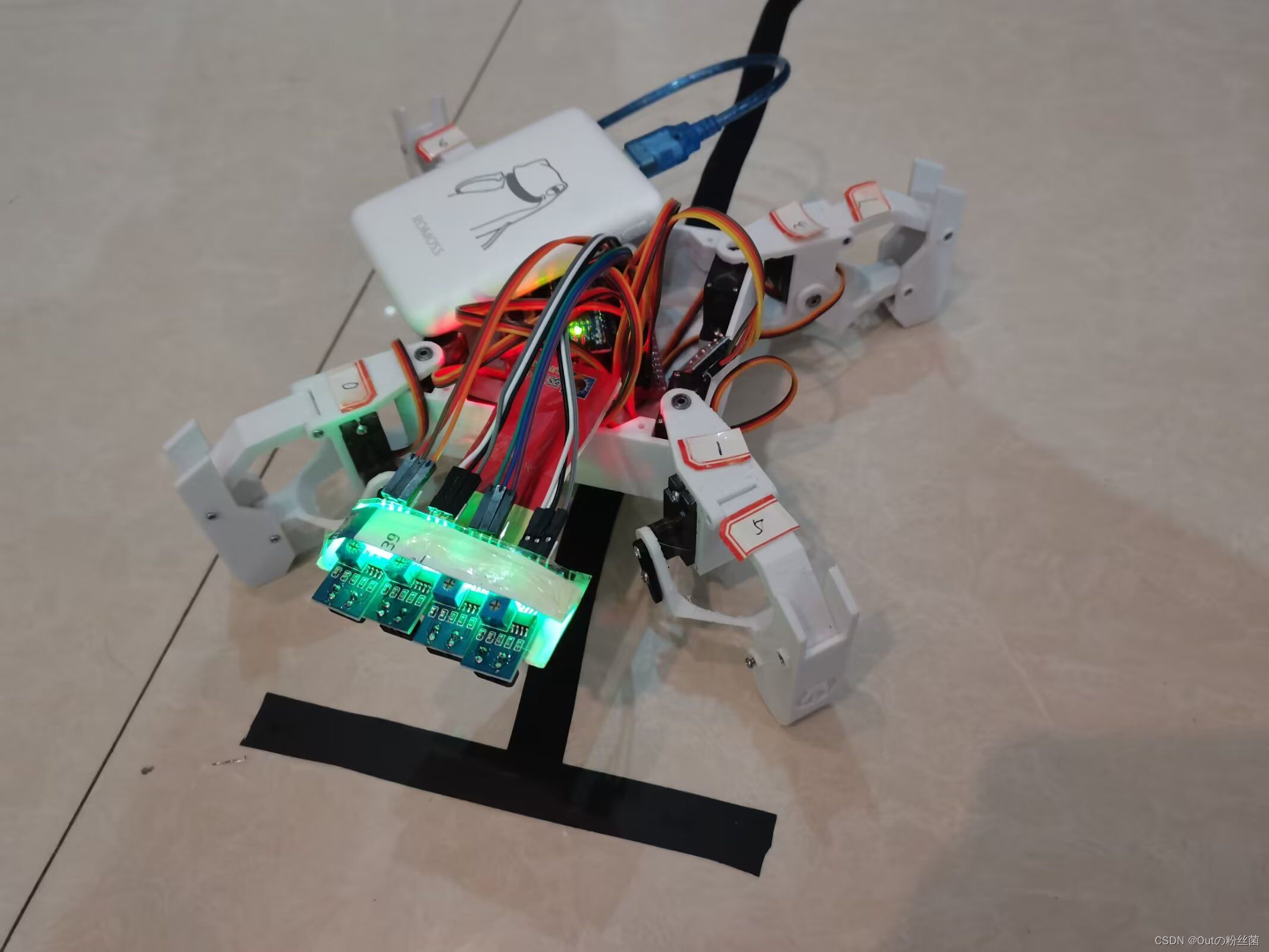
控制介绍
主控使用Arduino nano控制,不过这次每条腿添加了双线程控制,因此更加灵活,由于Arduino本身没有多线程,因此外置添加了一个Metro库,本质上是用定时器的millis函数写出来的,引用的开源项目可以参考:
Arduino 使用Metor库 简单实现多线程编程_ling3ye的博客-CSDN博客_arduino多线程编程
利用多线程实现对每条腿的控制延迟降低效果较好,同时通过每次旋转前反馈读取舵机角度,避免了大范围抖动旋转从而使舵机损坏,signalLegcontrol()函数针对每一条腿可以实现较好的控制
void signalLegcontrol(int value1,int value2,int cmd1,int cmd2){//单腿多线程控制
if(servo1Metro.check()){
servo1State =! servo1State;
P1_angle = servo[cmd1].read();
if(P1_angle < value1){
for(P1_angle;P1_angle <= value1;P1_angle++){
servo[cmd1].write(P1_angle);
delayMicroseconds(1000);
}
}
else if(P1_angle > value1){
for(P1_angle;P1_angle >= value1;P1_angle--){
servo[cmd1].write(P1_angle);
delayMicroseconds(1000);
}
}
else if(P1_angle = value1){
servo[cmd1].write(P1_angle);
delayMicroseconds(1000);
}
}
if(servo2Metro.check()){
servo1State =! servo1State;
P2_angle = servo[cmd2].read();
if(P2_angle < value2){
for(P2_angle;P2_angle <= value2;P2_angle++){
servo[cmd2].write(P2_angle);
delayMicroseconds(1000);
}
}
else if(P2_angle > value2){
for(P2_angle;P2_angle >= value2;P2_angle--){
servo[cmd2].write(P2_angle);
delayMicroseconds(1000);
}
}
else if(P2_angle = value2){
servo[cmd2].write(P2_angle);
delayMicroseconds(1000);
}
}
}利用该函数模块编写了手动模式和巡线模式两种,步态依旧采用‘X’型步态,同样暂时没有配合PID进行控制,但由于loop部分写得不是很好,仅用switch进行选择控制,因此要重新选择模式只能Reset,就很🐕,对于‘X’型步态规划,可以参考前一篇:
嵌入式学习记录(1)——四足蜘蛛机器人_Outの粉丝菌的博客-CSDN博客_四足蜘蛛机器人步态最终效果如下,由于使用的步态对于循迹模式不是很友好,因此后期必定需要改进
最终代码效果
#include <Servo.h>
#include <Metro.h>
#define tanglemax 175
#define tanglemin 5
#define Forward 0
#define TurnLeft 1
#define TurnRight 2
#define TurnBack 3
#define STOP 4
Servo servo[8];
int servo_pin[8];//舵机引脚
int P1_angle = 0;//当前角度值
int P2_angle = 0;
int P_angle[7];
unsigned int trace[4]={10,11,12,13};
boolean servo1State = false;
boolean servo2State = false;
String Trace;
String Hand;
Metro servo1Metro = Metro(20);
Metro servo2Metro = Metro(5);
void setup(){
Serial.begin(9600);
servoInitilize();
Serial.println("Initilized Over!!!");
}
void loop() {
//Tracing();
while(Serial.available()>0){
Serial.println("Mode Choose!!!");
Serial.println("Please choose your wanted mode!!!");
char SCMD = Serial.read();
//if(Serial.find("Trace")){
switch(SCMD){
case 'T'://TracingMode
Serial.println("Tracing Mode!!!");
while(1){
Serial.println("Tracing Mode!!!");
Tracing();
}
break;
case 'H'://HandleMode
Serial.println("Handel Mode!!!");
while(1){
char serialcmd = Serial.read();
HandControl(serialcmd);
}
break;
case 'V'://STOPMode
Serial.println("STOP!!!");
motorRun(STOP);
break;
}
}
}
void servoInitilize(){//对机器人进行初始化操作
for(int i = 0;i <= 8;i++){
servo_pin[i] = i+2;
servo[i].attach(servo_pin[i],500,2500);
servo[i].write(90);
delayMicroseconds(500);
}
servo[0].write(45);
delayMicroseconds(500);
servo[1].write(135);
delayMicroseconds(500);
servo[2].write(135);
delayMicroseconds(500);
servo[3].write(45);
delayMicroseconds(500);
Serial.println("Initilization!!!");
}
void signalLegcontrol(int value1,int value2,int cmd1,int cmd2){//单腿多线程控制
if(servo1Metro.check()){
servo1State =! servo1State;
P1_angle = servo[cmd1].read();
if(P1_angle < value1){
for(P1_angle;P1_angle <= value1;P1_angle++){
servo[cmd1].write(P1_angle);
delayMicroseconds(1000);
}
}
else if(P1_angle > value1){
for(P1_angle;P1_angle >= value1;P1_angle--){
servo[cmd1].write(P1_angle);
delayMicroseconds(1000);
}
}
else if(P1_angle = value1){
servo[cmd1].write(P1_angle);
delayMicroseconds(1000);
}
}
if(servo2Metro.check()){
servo1State =! servo1State;
P2_angle = servo[cmd2].read();
if(P2_angle < value2){
for(P2_angle;P2_angle <= value2;P2_angle++){
servo[cmd2].write(P2_angle);
delayMicroseconds(1000);
}
}
else if(P2_angle > value2){
for(P2_angle;P2_angle >= value2;P2_angle--){
servo[cmd2].write(P2_angle);
delayMicroseconds(1000);
}
}
else if(P2_angle = value2){
servo[cmd2].write(P2_angle);
delayMicroseconds(1000);
}
}
}
void motorRun(int cmd){
switch(cmd){
case Forward://前进
Serial.println("FORWARD!");
signalLegcontrol(15,45,0,4);
delayMicroseconds(1000);
signalLegcontrol(15,90,0,4);
delayMicroseconds(1000);
signalLegcontrol(75,135,3,7);
delayMicroseconds(1000);
signalLegcontrol(75,90,3,7);
delayMicroseconds(1000);
signalLegcontrol(45,90,0,4);
delayMicroseconds(1000);
signalLegcontrol(45,90,3,7);
delayMicroseconds(1000);//回正
signalLegcontrol(165,135,1,5);
delayMicroseconds(1000);
signalLegcontrol(165,90,1,5);
delayMicroseconds(1000);
signalLegcontrol(105,45,2,6);
delayMicroseconds(1000);
signalLegcontrol(105,90,2,6);
delayMicroseconds(1000);
signalLegcontrol(135,90,1,5);
delayMicroseconds(1000);
signalLegcontrol(135,90,2,6);
delayMicroseconds(1000);//回正
break;
case TurnLeft://左转
Serial.println("TURNLEFT!");
signalLegcontrol(15,45,0,4);
delayMicroseconds(1000);
signalLegcontrol(15,90,0,4);
delayMicroseconds(1000);
signalLegcontrol(15,135,3,7);
delayMicroseconds(1000);
signalLegcontrol(15,90,3,7);
delayMicroseconds(1000);
signalLegcontrol(105,45,1,5);
delayMicroseconds(1000);
signalLegcontrol(105,90,1,5);
delayMicroseconds(1000);
signalLegcontrol(105,135,2,6);
delayMicroseconds(1000);
signalLegcontrol(105,90,2,6);
delayMicroseconds(1000);
signalLegcontrol(45,90,0,4);//回正
delayMicroseconds(1000);
signalLegcontrol(45,90,3,7);
delayMicroseconds(1000);
signalLegcontrol(135,90,1,5);
delayMicroseconds(1000);
signalLegcontrol(135,90,2,6);
delayMicroseconds(1000);
break;
case TurnRight://右转
Serial.println("TURNRIGHT!");
signalLegcontrol(75,45,0,4);
delayMicroseconds(1000);
signalLegcontrol(75,90,0,4);
delayMicroseconds(1000);
signalLegcontrol(75,135,3,7);
delayMicroseconds(1000);
signalLegcontrol(75,90,3,7);
delayMicroseconds(1000);
signalLegcontrol(165,45,1,5);
delayMicroseconds(1000);
signalLegcontrol(165,90,1,5);
delayMicroseconds(1000);
signalLegcontrol(165,135,2,6);
delayMicroseconds(1000);
signalLegcontrol(165,90,2,6);
delayMicroseconds(1000);
signalLegcontrol(45,90,0,4);//回正
delayMicroseconds(1000);
signalLegcontrol(45,90,3,7);
delayMicroseconds(1000);
signalLegcontrol(135,90,1,5);
delayMicroseconds(1000);
signalLegcontrol(135,90,2,6);
delayMicroseconds(1000);
break;
case TurnBack:
Serial.println("TURNBACK!");
signalLegcontrol(75,45,0,4);
delayMicroseconds(1000);
signalLegcontrol(75,90,0,4);
delayMicroseconds(1000);
signalLegcontrol(15,135,3,7);
delayMicroseconds(1000);
signalLegcontrol(15,90,3,7);
delayMicroseconds(1000);
signalLegcontrol(45,90,0,4);
delayMicroseconds(1000);
signalLegcontrol(45,90,3,7);
delayMicroseconds(1000);//回正
signalLegcontrol(105,135,1,5);
delayMicroseconds(1000);
signalLegcontrol(105,90,1,5);
delayMicroseconds(1000);
signalLegcontrol(165,45,2,6);
delayMicroseconds(1000);
signalLegcontrol(165,90,2,6);
delayMicroseconds(1000);
signalLegcontrol(135,90,1,5);
delayMicroseconds(1000);
signalLegcontrol(135,90,2,6);
delayMicroseconds(1000);//回正
break;
case STOP:
Serial.println("STOP!");
//servoInitilize();//后续改进
for(int Snum = 0;Snum <= 7;Snum++){
P_angle[Snum] = servo[Snum].read();
servo[Snum].write(P_angle[Snum]);
delayMicroseconds(1000);
}
break;
}
}
void Tracing(){//循迹模式
int data[4];
data[0] = digitalRead(10);
data[1] = digitalRead(11);
data[2] = digitalRead(12);
data[3] = digitalRead(13);
if(!data[0] && !data[1] && !data[2] && !data[3]) //左右都没有检测到黑线
{
motorRun(Forward);
}
if(data[0] || data[1]) //右边检测到黑线
{
motorRun(TurnRight);
}
if(data[2] || data[3]) //左边检测到黑线
{
motorRun(TurnLeft);
}
if(data[0] && data[3]) //左右都检测到黑线是停止
{
motorRun(STOP);
while(1);
}
Serial.print(data[0]);
Serial.print("---");
Serial.print(data[1]);
Serial.print("---");
Serial.print(data[2]);
Serial.print("---");
Serial.println(data[3]);
}
void HandControl(char serialcmd){//手动控制模式
switch(serialcmd){
case 'F':
Serial.println("Please enter Your Wnated Pases!!!:");
motorRun(Forward);
break;
case 'L':
motorRun(TurnLeft);
break;
case 'R':
motorRun(TurnRight);
break;
case 'B':
Serial.println("Please enter Your Wnated Pases!!!:");
motorRun(TurnBack);
break;
case 'S':
motorRun(STOP);
break;
}
}