目录
1.算法运行效果图预览


2.算法运行软件版本
matlab2022a
3.部分核心程序
..........................................................................
kkk = 0;
for EbN0 = EbN0_sub
kkk
kkk = kkk + 1;
for jj1 = 1:Tag_Num
jj1
rng(jj1);
for jj = 1:num_bits
%TAG to BS1
delay_1 = round(time_bs_tag(1,jj1)/ts);
xx1 = zeros(1,delay_1);
%传播时延
delay_1_1(jj,:) = [xx1 sig(1:end-length(xx1))];
%UWB
h_4 = uwb_channel(dist_bs_tag(1,jj1));
%信号经过信道
conv_data1 = conv(delay_1_1(jj,:),h_4);
UWB_chan1(jj,:) = conv_data1(1:length(sig));
%TAG to BS2
delay_2 = round(time_bs_tag(2,jj1)/ts);
xx2 = zeros(1,delay_2);
%传播时延
delay_2_1(jj,:) = [xx2 sig(1:end-length(xx2))];
h_2 = uwb_channel(dist_bs_tag(2,jj1));
conv_data2 = conv(delay_2_1(jj,:),h_2);
UWB_chan2(jj,:) = conv_data2(1:length(sig));
%TAG to BS3
delay_3 = round(time_bs_tag(3,jj1)/ts);
xx3 = zeros(1,delay_3);
%传播时延
delay_3_1(jj,:) = [xx3 sig(1:end-length(xx3))];
h_3 = uwb_channel(dist_bs_tag(3,jj1));
conv_data3 = conv(delay_3_1(jj,:),h_3);
UWB_chan3(jj,:) = conv_data3(1:length(sig));
%TAG to BS4
delay_4 = round(time_bs_tag(4,jj1)/ts);
xx4 = zeros(1,delay_4);
%传播时延
delay_4_1(jj,:) = [xx4 sig(1:end-length(xx4))];
h_4 = uwb_channel(dist_bs_tag(4,jj1));
conv_data4 = conv(delay_4_1(jj,:), h_4);
UWB_chan4(jj,:) = conv_data4(1:length(sig));
end
for jj = 1:num_bits
UWB_chan1n(jj,:) = awgn(UWB_chan1(jj,:)/max(UWB_chan1(jj,:)),EbN0,'measured');
UWB_chan2n(jj,:) = awgn(UWB_chan2(jj,:)/max(UWB_chan2(jj,:)),EbN0,'measured');
UWB_chan3n(jj,:) = awgn(UWB_chan3(jj,:)/max(UWB_chan3(jj,:)),EbN0,'measured');
UWB_chan4n(jj,:) = awgn(UWB_chan4(jj,:)/max(UWB_chan4(jj,:)),EbN0,'measured');
end
%自适应前沿检测
%自适应前沿检测
..........................................................
end
end
P_est0 = [x_est0',y_est0',z_est0'];
P_est1 = [x_est1',y_est1',z_est1'];
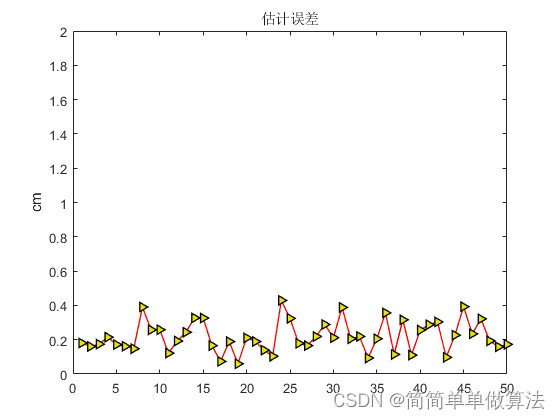
figure;
plot(toa_error0,'-r>',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
hold on
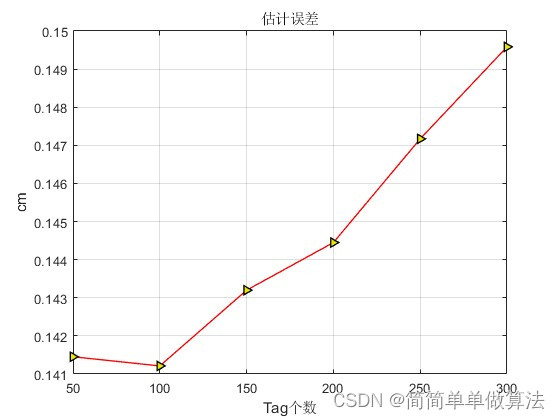
title('估计误差')
axis([0,Tag_Num,0,2]);
ylabel('cm');
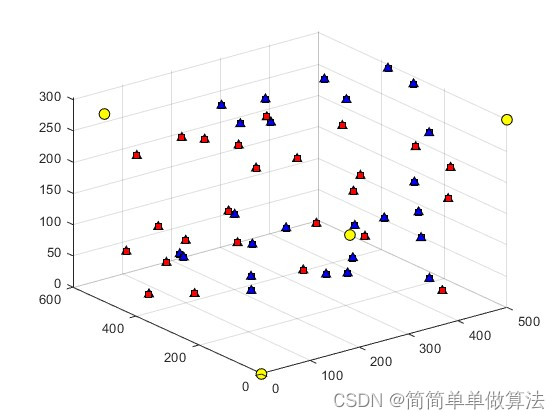
figure
axis([0 10 0 10 0 10]);
for i=1:BS_Num
plot3(BS_pos(i,1),BS_pos(i,2),BS_pos(i,3),'ko','MarkerFace','y','MarkerSize',8);
hold on
end
hold on
for i=1:Tag_Num
plot3(Tag(i,1),Tag(i,2),Tag(i,3),'k^','MarkerFace','b','MarkerSize',6);
hold on
plot3(x_est1(i),y_est1(i),z_est1(i),'ks','MarkerFace','r','MarkerSize',6);
hold on
end
grid on
xlabel('cm');
ylabel('cm');
zlabel('cm');
save R.mat toa_error1
36_003m4.算法理论概述
基于UWB和IMU融合的三维空间定位算法是一个结合了无线脉冲波(UWB)和惯性测量单元(IMU)各自优势的定位方法。UWB通过测量信号的传输时间来计算距离,具有精度高、抗干扰能力强等优点,但易受多径效应和环境噪声的影响。IMU则通过测量加速度和角速度来计算姿态和位置信息,具有实时性和动态性强的特点,但受限于加速度的测量误差和漂移。
通过将这两种技术进行融合,可以充分利用它们的优点来提高定位精度和稳定性。具体来说,UWB可以提供高精度的距离信息,用于计算目标的位置和姿态,而IMU可以提供实时的加速度和角速度信息,用于修正UWB的测量误差和漂移,同时提高系统的响应速度和鲁棒性。
下面介绍一种基于UWB和IMU融合的三维空间定位算法,其原理和数学公式如下:
- UWB定位
UWB采用双基站的定位方式,假设已知两个基站的位置坐标为(x1, y1, z1)和(x2, y2, z2),目标的位置坐标为(x, y, z),则可以通过以下公式计算目标到两个基站的距离差:
Δd = (x2-x1)² + (y2-y1)² + (z2-z1)² - (x-x1)² - (y-y1)² - (z-z1)²
其中,(x, y, z)为目标的位置坐标,(x1, y1, z1)和(x2, y2, z2)分别为两个基站的位置坐标。根据距离差和两个基站的坐标,可以列出两个方程,求解得到目标的位置坐标(x, y, z)。
IMU辅助
IMU可以提供实时的加速度和角速度信息,用于修正UWB的测量误差和漂移。具体来说,IMU可以提供一个加速度传感器和一个陀螺仪,分别测量加速度和角速度信息。通过对这些信息进行积分和平滑处理,可以得到目标的姿态和位置信息。
在融合过程中,可以将IMU的加速度和角速度信息作为UWB的辅助数据,对UWB的测量结果进行修正。具体来说,可以将IMU的加速度信息用于计算目标的速度和加速度,对UWB的距离测量结果进行修正,同时利用IMU的角速度信息对UWB的角度测量结果进行修正。这样可以使系统具有更高的精度和鲁棒性。
融合算法
基于UWB和IMU融合的三维空间定位算法主要包括两个阶段:数据采集阶段和数据融合阶段。在数据采集阶段,通过UWB和IMU采集目标的位置、速度、加速度、角速度等信息;在数据融合阶段,将采集到的数据进行融合处理,得到目标的最终位置、速度、加速度、角速度等信息。
解算过程可以根据需要采用最小二乘法、卡尔曼滤波等方法进行优化求解。例如,采用卡尔曼滤波算法可以将UWB和IMU的数据进行融合处理,得到更为精确的目标位置、速度、加速度、角速度等信息。具体实现过程如下:
(1)初始化状态矩阵和控制矩阵;
(2)通过UWB和IMU采集数据;
(3)利用采集到的数据计算状态矩阵和控制矩阵;
(4)根据卡尔曼滤波公式对状态矩阵和控制矩阵进行迭代计算;
(5)根据迭代结果计算目标的最终位置、速度、加速度、角速度等信息。
算法优点
基于UWB和IMU融合的三维空间定位算法具有以下优点:
(1)精度高:通过UWB和IMU的融合,可以减小环境噪声对定位精度的影响,提高算法的鲁棒性;
(2)实时性强:IMU的加速度和角速度信息可以提供实时的姿态和位置信息,对UWB的距离测量结果进行修正,缩短了系统的响应时间;
(3)可靠性高:通过数据融合技术处理多传感器数据,可以减小单一传感器的故障对系统性能的影响;
(4)扩展性强:该算法可以适用于多种场景,例如机器人定位、无人驾驶等。
5.算法完整程序工程
OOOOO
OOO
O