什么是 OSG?
全称:OpenSceneGraph(开源场景图)
定位:一个基于 C++/OpenGL 的高性能开源3D图形开发工具包,专注于实时渲染和复杂场景管理。
核心思想:通过 场景图(Scene Graph) 数据结构高效组织和管理3D对象(如模型、灯光、相机),优化渲染流程。
说白了,就是个基于C++的渲染引擎。
老规矩,学习任何代码,第一个当然是我们的hello,world程序
安装OSG
我这里用的是ubuntu系统,直接执行安装命令:
sudo apt-get update
sudo apt-get install libopenscenegraph-dev cmake build-essential g++
安装完成后,打开我们的编辑器vscode或者vim或者其他的,实现如下代码和cmake文件。
从Hello,World开始
上代码:
hello_world.cpp
#include <osgViewer/Viewer>
#include <osg/Geode>
#include <osg/ShapeDrawable>
#include <osg/PositionAttitudeTransform>
int main(int argc, char** argv)
{
// 创建一个视图器对象
osgViewer::Viewer viewer;
// 创建一个 Box 形状
osg::ref_ptr<osg::Box> box = new osg::Box(osg::Vec3(0.0f, 0.0f, 0.0f), 1.0f);
// 创建一个 ShapeDrawable 对象
osg::ref_ptr<osg::ShapeDrawable> shapeDrawable = new osg::ShapeDrawable(box.get());
// 创建一个 Geode 节点
osg::ref_ptr<osg::Geode> geode = new osg::Geode();
geode->addDrawable(shapeDrawable.get());
// 创建一个 PositionAttitudeTransform 节点以设置位置、旋转和缩放
osg::ref_ptr<osg::PositionAttitudeTransform> transform = new osg::PositionAttitudeTransform();
transform->setPosition(osg::Vec3(0.0f, 0.0f, 0.0f));
transform->addChild(geode.get());
// 将 Transform 节点添加到场景中
viewer.setSceneData(transform.get());
// 运行查看器主循环
return viewer.run();
}
代码什么含义先不用管,先运行看看效果。
CMakeLists.txt
cmake_minimum_required(VERSION 3.0)
project(OSG_HelloWorld)
find_package(OpenSceneGraph REQUIRED COMPONENTS osgDB osgViewer)
add_executable(hello_world hello_world.cpp)
target_link_libraries(hello_world ${OPENSCENEGRAPH_LIBRARIES})
执行编译命令:
mkdir build
cd build
cmake ../
make
运行效果
编译完了运行看下效果:
./hello_world
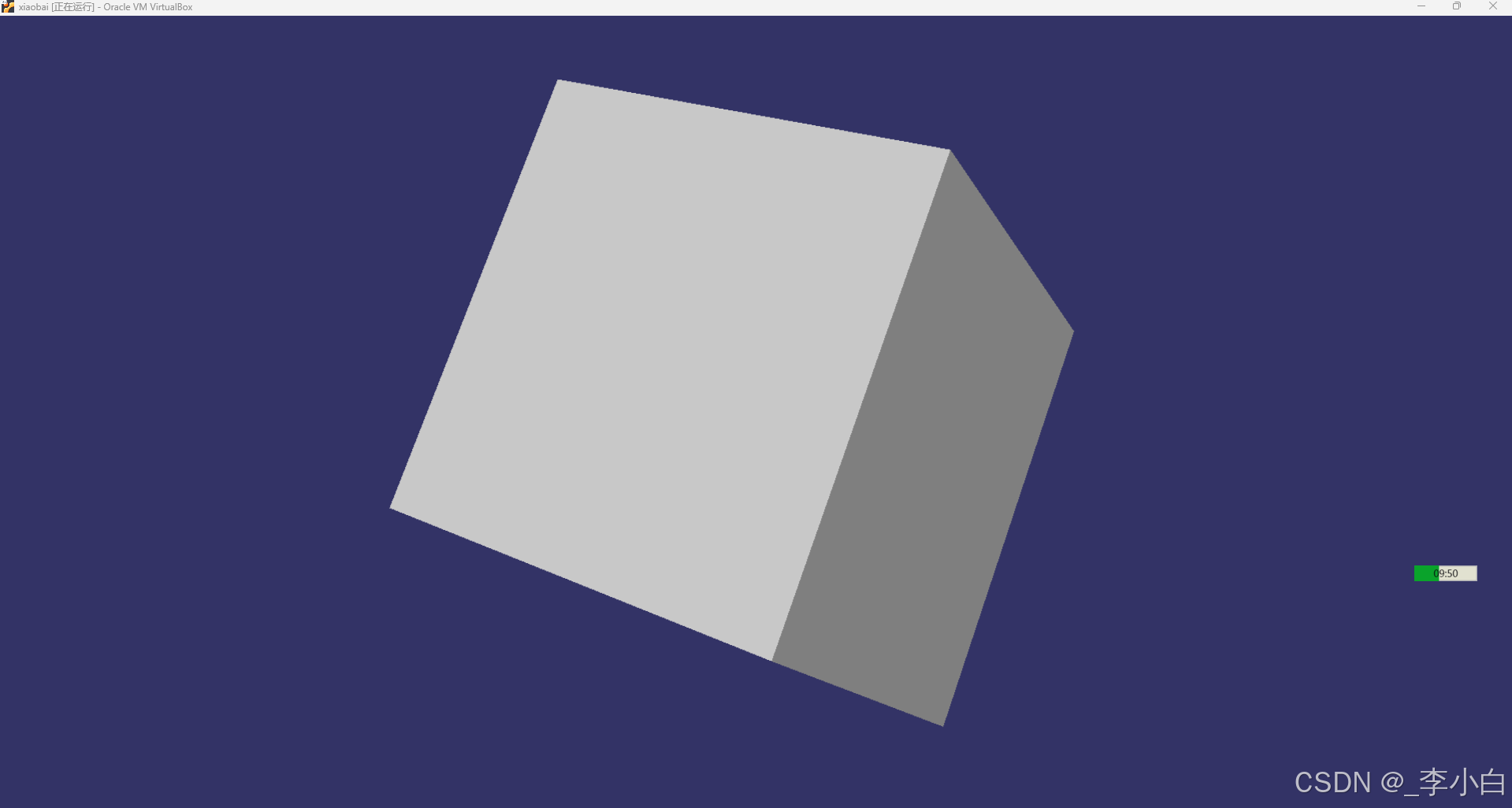
OK,到这里我们就生成了一个立方体在场景中。是不是很简单。_
今天就到这里了,下课。
