目录
一、R-CNN
1、R-CNN概述
R-CNN由Ross Girshick等人在2014年提出,是首批将深度卷积神经网络引入目标检测的经典方法。它将对象检测问题分解为“候选区域生成+分类+回归”三步走流程,有效地利用了深度特征,显著提升了检测精度,但也暴露出计算效率低的问题。
2、R-CNN 模型总体流程
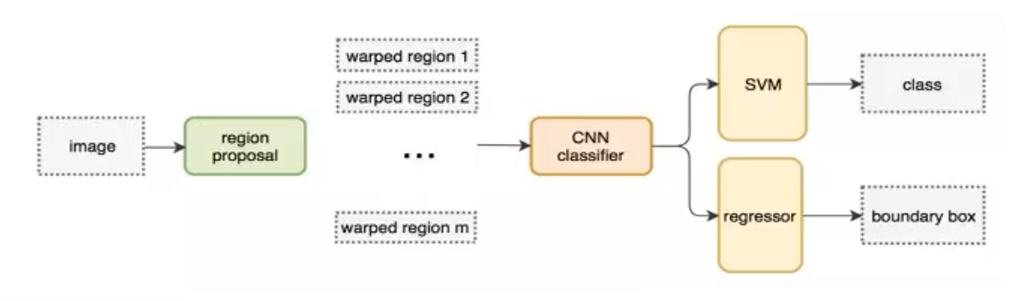
R-CNN 将目标检测拆分为三大阶段:
候选框生成(Selective Search)
深度特征提取 & 微调(CNN + Fine-tune)
后端分类与回归(SVM + BBox Regression)
在推理时,依次执行以上三步,最终得到检测框与类别。
3、核心模块详解
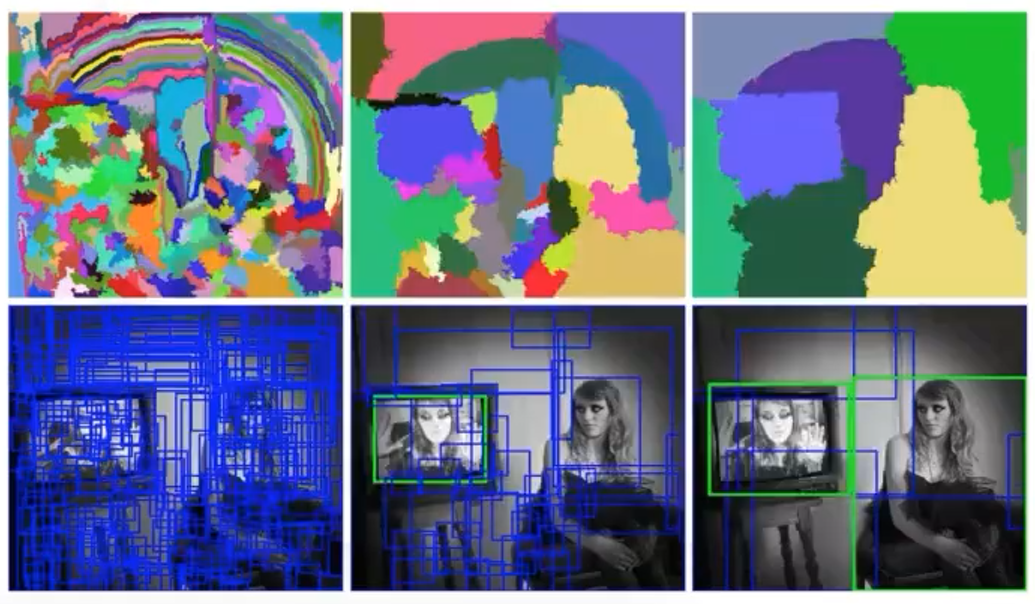
(1)候选框生成(Selective Search)
原理:结合图像分割(Felzenszwalb 算法)和贪心区域合并,先基于颜色、纹理、尺寸、填充比等多种相似度逐层合并超像素;
输出:每幅图约 2,000 个高召回率的候选框,IoU 覆盖率可达 90% 以上。loU:交并比
复杂度:O(n log n),在 CPU 上每图耗时 ≈2 秒。
(2)深度特征提取与微调
2.1 特征提取
网络结构:采用 ImageNet 上预训练的 AlexNet 或 ZF-Net,去掉最后的分类层,仅保留到 fc7(4096 维特征)。
输入处理:对每个候选框执行:
裁剪:从原图裁剪出 bbox 区域;
Warp:双线性插值将裁剪区域缩放至固定的 227×227;
前向传播:单独将每个 patch 送入 CNN,提取 fc7 特征。
计算量:每个候选框一次完整的 227×227→conv→pool→fc 计算,推理时≈2,000次,导致极高的计算开销。
2.2 网络微调(Fine-tuning)
目标:使预训练分类网络更适应目标检测的特征分布;
流程:
用候选框 patch 及其对应的真实标签(正样本 IoU ≥0.5,负样本 IoU ≤0.3)构成训练集;
定义多分类交叉熵损失,微调网络最后两层(fc6、fc7)及分类层;
学习率较小(如原 lr 的 0.1–0.01),以防过拟合。
效果:特征在检测任务上表现更优,但训练时间仍需数小时至十数小时。
(3)后端分类与边框回归
3.1 SVM 分类器
训练:对每个类别训练一个 one-vs-all 线性 SVM,损失:
xi:CNN 提取的 4096 维特征;
:正负样本标签;
C:正则化权重。
样本:正样本 IoU ≥0.5,负样本 IoU ∈ [0.1, 0.5);对负样本进行难例挖掘(bootstrapping),过滤易分类样本。
3.2 边框回归(BBox Regression)
目标:将候选框
校正到更精确的 ground-truth 框
;
回归参数:
学习:对每个类别训练一个线性回归器,最小化平滑 L1 损失:
4、训练与推理流程一览
| 阶段 | 步骤 |
|---|---|
| 训练 | 1. 生成候选框; 2. 裁剪 Warp → CNN 微调; 3. 提取 fc7 特征 → 训练 SVM; 4. 用正样本训练边框回归器。 |
| 推理 | 1. 生成候选框; 2. 对每个框 Warp → CNN 前向 → 提取特征; 3. SVM 分类得分 + 回归偏移; 4. NMS 去重。 |
5、模型性能与瓶颈
检测精度
在 PASCAL VOC 2007 上,R-CNN mAP 可达 58.5%(AlexNet)、62.2%(ZF-Net);
速度与资源
训练:微调+特征提取+SVM 训练,整个流水线需数天;
推理:每张图约需 47s(CPU)或 10s(GPU);
存储:需缓存所有候选框的 4096D 特征(数 GB)。
瓶颈分析
重复卷积:2000 个候选框各自前向,卷积计算完全冗余;
多阶段训练:微调、特征提取、SVM、回归器四步不同目标,难以端到端优化;
候选框依赖:Selective Search 慢且无法并行 GPU 加速。
6、对后续模型的启示
共享特征计算:Fast R-CNN 引入 RoI Pooling,整图一次卷积后共享特征,解决了重复计算;
端到端训练:Fast R-CNN 及 Faster R-CNN 通过多任务损失实现单阶段训练;
候选框网络化:Faster R-CNN 的 RPN 将 region proposal 也集成到网络,进一步加速;
空间对齐精度:Mask R-CNN 用 RoIAlign 消除量化误差,提升小目标检测与分割精度。
二、SPPNet
1、模型动机
传统 CNN(如 AlexNet、ZF-Net)在处理目标检测或图像检索时,需要将输入裁剪或变形到固定尺寸,才能接入全连接层。这带来两个主要问题:
形变失真:对长宽比差异大的图像或候选区域,Warp 变形会丢失部分几何信息;
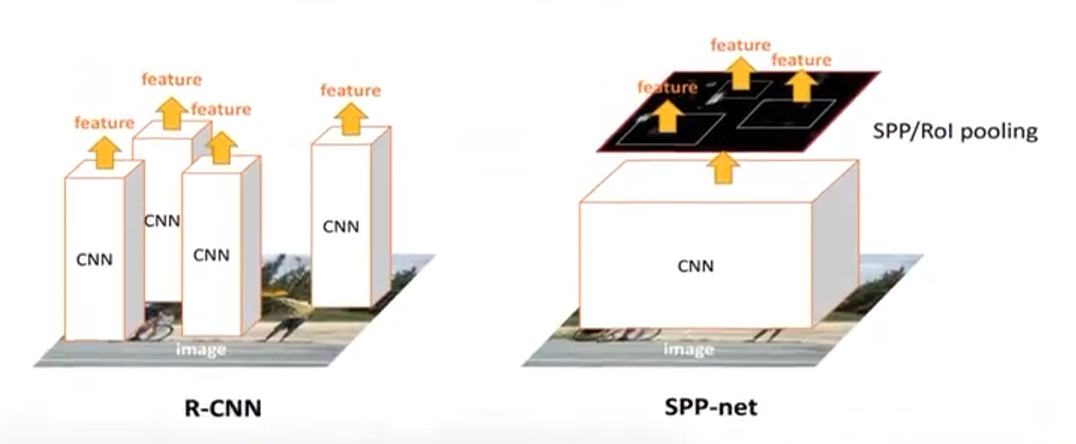
重复计算:R-CNN 对每个候选框都要做一次完整的前向传播,极其低效。
SPPNet 的核心动机便是:
- 一张图片直接全部进行卷积,卷积后再考虑从特征图上裁剪2000个子特征图,比R-CNN计算2000次卷积计算量减少了很多。裁剪子特征图是依照原图的2000个候选框所在原图的位置,在总的特征图上进行裁剪作为某个候选框的特征图。这时候,不同候选框的特征图的大小是不相同的。多尺度池化统一特征图大小。
解除输入尺寸限制;
在 卷积特征图 上直接进行多尺度池化,实现对不同大小 ROI 的统一表征;
保留 CNN 的强大特征表达,同时大幅减少重复计算。
2、网络整体结构
输入:任意尺寸图像
│
多层卷积 + 池化 → 特征图 F(尺寸为 H×W×C)
│
┌──────────────────────────────────────────┐
│ 空间金字塔池化层 SPP(F) │
│ ┌── Level 1: 1×1 划分 → 每格 max-pool │
│ ├── Level 2: 2×2 划分 → 每格 max-pool │
│ ├── Level 3: 3×3 划分 → 每格 max-pool │
│ └── Level 4: 6×6 划分 → 每格 max-pool │
└──────────────────────────────────────────┘
│
向量拼接 → 固定长度特征向量
│
FC6 → FC7 → 分类 & 边框回归
卷积主干:通常使用与 R-CNN 相同的预训练网络(AlexNet、ZF-Net),只去掉最后的 FC 层。
SPP 层:在 F 上以多种网格尺寸(如 1×1、2×2、3×3、6×6)做 max-pooling,每个尺度产生
个区域的池化值,并将所有尺度结果串联。
输出维度:若 F 的通道数为 C,则各尺度输出通道总数为
该固定长度特征向量即可接入后续 FC。
3、数学原理与细节
SPP 池化区域计算
对于特征图大小为 (H,W),在第级金字塔(划分为
)中,第
个子网格的空间范围为
对此区域在通道维做 max-pooling,得到一个长度为 C 的向量。
梯度反向传播
SPP 层中每个子网格的 max-pooling 对应一个可微分的操作,最大值所在位置在反向时获得梯度,其他位置梯度为 0。这样上层的损失能正确传至主干网络。与单尺度池化的比较
传统 RoI Pooling 仅做单个尺度(如 7×7)池化;
SPP 在多个尺度融合上下文信息,兼具全局与局部表征,有助于多尺寸目标的检测。
4、训练与微调策略
预训练
在 ImageNet 上训练主干卷积部分,得到基础权重。
候选框生成
使用 Selective Search 或 EdgeBoxes 等算法生成 Region Proposals。
共享卷积特征提取
整图一次前向卷积,得到特征图 F;
对每个 RoI 在 F 上进行 SPP 池化,避免了 R-CNN 对每个 RoI 重复前向。
FC 层微调
将 SPP 层输出送入 FC6、FC7,联合微调这些层及主干的后几层;
损失函数同 Fast R-CNN,包含分类交叉熵与回归平滑 L1,两者加权求和。
学习率与训练批次
通常先冻结 backbone,仅微调 FC;
再放开 backbone 后几层,使用较小学习率(如 0.001→0.0001)做细调;
每批采样若干图像和若干 RoI(例如 2 图 × 128 RoI)。
5、性能评估
| 方法 | PASCAL VOC07 mAP | GPU 推理速度 |
|---|---|---|
| R-CNN | 58.5% (AlexNet) | ≈0.5 FPS |
| SPPNet | 59.2% (ZF-Net) | ≈8 FPS |
| Fast R-CNN | 66.9% (ZF-Net) | ≈5 FPS |
SPPNet 相比 R-CNN,在 mAP 上持平或略增,同时速度提升约 16 倍。
与后来端到端的 Fast R-CNN 相比,SPPNet 在速度上仍有优势,但准确率略低,因为 RoI Pooling 的设计及训练流程更成熟。
6、优缺点与局限
(1)优点
任意尺寸支持:无需裁剪 Warp,图像及 RoI 保持原始比例;
多尺度上下文融合:不同金字塔层兼顾全局与细节;
高效共享计算:整图卷积一次完成,大幅降低重复量。
(2)缺点
外部候选框依赖:仍需 Selective Search,速度瓶颈未彻底解决;
金字塔固定模式:预设的层数和网格尺寸不够自适应;
内存与计算:SPP 输出维度大(如 C×50),可能导致 FC 计算量和内存占用增加。
7、对后续模型的启示
RoI Pooling:Fast R-CNN 将 SPP 简化为单尺度,使代码实现更直观;
RPN:Faster R-CNN 继承 SPPNet 的共享特征思想,把候选框生成也 “网络化”;
RoIAlign:Mask R-CNN 在 Pooling 对齐上更精细,解决量化误差;
自适应池化:后续工作(如 TridentNet)探索动态或可学习的多尺度池化方案。
三、FastRCNN
1、Fast R-CNN 概述
Fast R-CNN 由 Ross Girshick 于 2015 年提出,旨在在保持高精度的同时,进一步加速 R-CNN 系列模型的检测速度。它结合了 R-CNN 和 SPPNet 的思想,引入了 RoI Pooling 操作,使得所有候选区域共享整图一次卷积特征,并能在网络端到端地联合训练分类和回归分支。
改进点:提出一个Rol pooling,然后整合整个模型,把CNN、SPP变换层、分类器、bbox回归几个模块一起训练。
2、网络结构
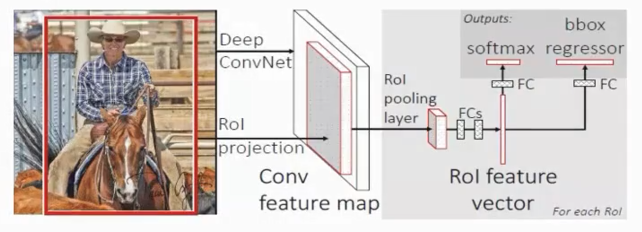
整体可分为以下几个模块(见下图示意):
输入图像─────────────────────────────────┐
│ │
卷积 / 池化 层(backbone,如 VGG16)
│ 候选框
特征图 ──────┐
│ │
RoI Pooling ───────────────────┴
│
全连接层(FC6→FC7)
│
┌────────┴────────┐
│ │
分类分支 (Softmax) 边框回归分支 (BBox Regression)
Backbone(主干网络)
常用 VGG16、ZFNet 等预训练网络的前若干层(直到 conv5)
对整张图只做一次前向传播,输出高维特征图。
Region Proposals
输入:使用外部算法(如 Selective Search)生成约 2,000 个候选框。
这些候选框具有相对原图的坐标位置。
RoI Pooling 层
输入:主干网络产生的特征图 + 各 ROI 坐标
操作:将每个 ROI 在特征图上按照预定分辨率(如 7×7)划分网格,并在每个网格中进行最大池化。
输出:对于每个 ROI 都得到一个固定尺寸(7×7×C)的特征块。
全连接层 & Head
Flatten → FC6 → FC7:将每个 ROI 的池化特征扁平化,经两层全连接得到 4096 维向量。
双分支输出:
分类分支:Softmax 输出 K+1 类别(K 个目标类别 + 背景)。
回归分支:每个前景类别都有一组 4 维回归参数,用于微调 ROI 的坐标。
3、关键技术点
RoI Pooling
核心价值:使得来自不同大小 ROI 的特征都能被池化为相同尺寸,简化后续全连接处理;
高效共享:所有 ROI 共享同一次卷积特征,大幅减少重复计算,整体速度可提升到 5–10 FPS。
端到端多任务联合训练
损失函数
p:预测的类别概率分布;
u:真实类别标签;
t:预测的回归偏移;
v:真实偏移目标;
:交叉熵损失,
:平滑 L1 损失,只对前景 ROI 生效(u≥1指示函数)。
优势:分类和回归在同一网络中共同优化,特征能同时兼顾两者需求。
Mini-batch 设计
每次迭代从若干图像中采样固定数量的 RoI(如 2 图像、每图 128 个 RoI),保持训练稳定;
正负样本比通常设为 1:3,并使用 IoU 阈值(正样本 IoU ≥ 0.5,负样本 IoU ≤ 0.5)。
Backpropagation 流向
RoI Pooling 可视为可微分操作,其梯度能“准确地”分配回对应的特征图单元;
既更新全连接层,也更新 backbone 的卷积层,实现真正的端到端微调。
4、训练与推理流程
训练阶段
预训练:在 ImageNet 上训练 backbone 网络;
生成候选框:对训练集产生 RoI;
特征与 RoI Pooling:整图卷积 → RoI Pooling 得到固定特征;
前向+损失:过 FC → 计算分类与回归损失;
反向传播:梯度通过 FC、RoI Pooling 传至卷积层,联合更新所有参数。
推理阶段
对输入图像生成 RoI;
整图一次卷积 → 特征图;
对每个 RoI 做 Pooling → FC → 得到各类别得分和回归偏移;
对每个类别应用偏移校正并执行 NMS,输出最终检测结果。
5、优缺点分析
优点
速度大幅提高:共享卷积计算 + RoI Pooling,整体检测速度可达 5–10 FPS;
端到端训练:分类与回归任务在同一框架内联合优化,简化流程;
简单实用:只需替换 R-CNN 中的特征抽取与 SVM、回归器,结构清晰。
缺点
仍依赖外部候选框:Selective Search 速度瓶颈未解;
Pool 格网量化误差:RoI Pooling 的离散网格可能丢失对齐精度,尤其对细小目标不友好;
内存与计算:处理数千 RoI 时,后端 FC 计算仍然较重。
6、后续演进
Faster R-CNN(2015)
用 RPN 取代外部候选框,真正实现端到端、实时化的候选区域生成。
Mask R-CNN(2017)
引入 RoIAlign,消除量化误差;新增实例分割分支。
Cascade R-CNN、Libra R-CNN 等
针对不同 IoU 阈值的多级检测头设计;对样本分布进行均衡处理。
四、FasterRCNN
1、Faster R-CNN 概述
Faster R-CNN 由 Shaoqing Ren 等人在 2015 年提出,可看作 Fast R-CNN 与区域建议网络(RPN, Region Proposal Network)的有机结合。相比于依赖外部候选框生成(Selective Search)的 Fast R-CNN,Faster R-CNN 通过 RPN 在共享特征上实时生成高质量的候选区域,真正实现了端到端、近实时的目标检测。
2、整体网络结构
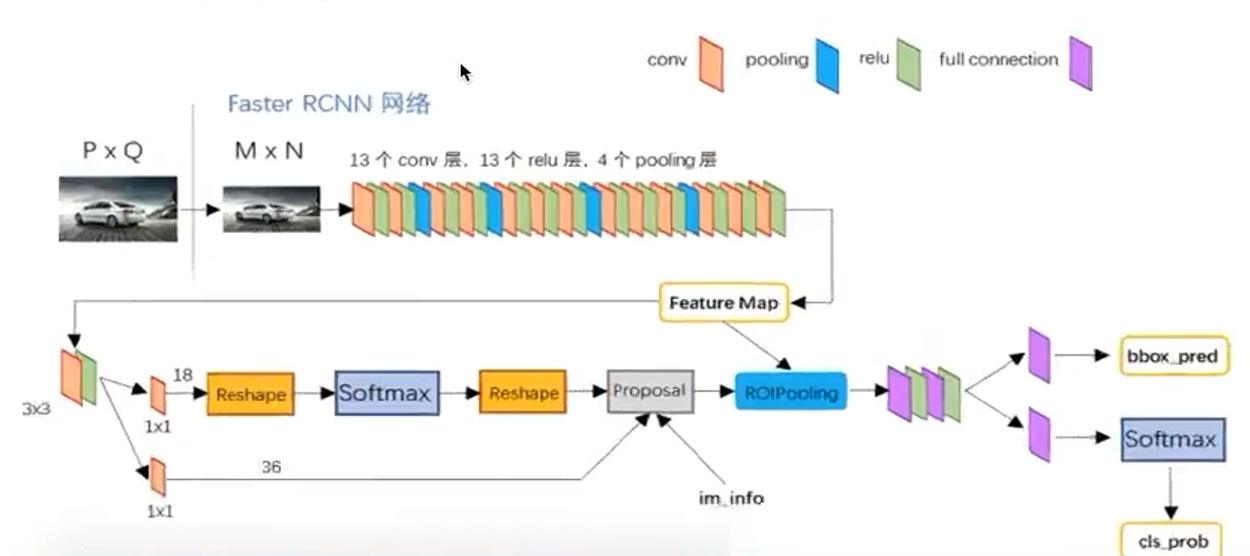
Backbone:常用 VGG16、ResNet-50/101 等,提取整图卷积特征。
RPN(Region Proposal Network):在特征图上滑动窗口,生成候选框及其前景概率和边框回归偏移。
RoI Pooling:对 RPN 输出的候选框,在共享特征图上做固定尺寸(如 7×7)的池化。
FC Head:对每个 RoI 池化特征经过两层全连接后,分别输出类别概率和更精细的边框回归。
3、关键技术点
(1)区域建议网络(RPN)
滑动窗口与 Anchor
在特征图的每个位置,用大小(如 128²、256²、512² 像素)和比例(1:1、1:2、2:1)预定义 9 个 anchor。
每个 anchor 对应两个任务:对象/背景分类、4 个坐标偏移的边框回归。
共享特征
RPN 与后续检测头共享 backbone 提取的特征,避免重复计算。
RPN 损失
:第 i 个 anchor 预测为前景的概率;
:真实标签(前景=1/背景=0);
vs.
:预测与真实的边框偏移;
只对前景 anchor 计算回归损失。
(2)多任务联合训练
端到端优化:RPN 与 Fast R-CNN 检测头可交替迭代训练,也可使用“近端微调”方式在一次网络中联合优化。
共享梯度:RPN 的梯度会反向传至 backbone,检测头的梯度同样更新 backbone,共享特征更加适应检测任务。
(3)RoI Pooling 与后端 Head
RoI Pooling:将任意尺寸的候选框映射到特征图后,以固定网格(一般为 7×7)做 max-pooling,输出尺寸一致的特征块。
FC Head:两层全连接后分出两个分支——分类分支(Softmax over K+1 类)与回归分支(每类 4 维偏移)。
4、训练与推理流程
(1)训练阶段
预训练 Backbone:在 ImageNet 分类数据集上预训练。
训练 RPN:在 detection 数据集上,仅微调 RPN 分支与 backbone,生成高质量 proposals。
训练检测头:用 RPN 提供的 proposals 训练 Fast R-CNN Head,微调 backbone & FC Head。
迭代优化:可交替重复上两步,使 RPN 与检测头协同进化,最终得到统一网络。
(2)推理阶段
整图卷积:输入一次图像,得到特征图。
RPN 预测:在特征图上滑窗,输出候选框及前景分数,经过 NMS 筛选前 300–600 个 proposals。
RoI Pooling + FC Head:对每个 proposal 池化并过 FC,输出最终类别分数与回归偏移,并再次做 NMS,输出最终检测结果。
5、优势与挑战
(1)优点
速度提升:RPN 轻量高效,可达 5–7 FPS(ResNet-50),极大优于前代。
端到端训练:检测网络完整一体,特征更具针对性;
高精度:基于 anchor 的多尺度、多长宽比设计,对各种尺寸目标均表现良好。
(2)缺点
Anchor 设计依赖:需要手动设定 anchor 尺度与比例,不同数据集需调参;
RoI Pooling 对齐误差:离散量化导致精度损失,尤其小物体,后续 Mask R-CNN 引入 RoIAlign 予以改进;
训练复杂度:RPN 与检测头的多阶段或交替训练流程较 Fast R-CNN 略繁琐。
6、后续演进
Mask R-CNN(2017)
用 RoIAlign 代替 RoI Pooling,消除量化误差;
在检测基础上增加实例分割分支。
RetinaNet(2017)
单阶段检测网络,引入 Focal Loss 处理正负样本极度不平衡问题。
Cascade R-CNN(2018)
多级检测头,逐级提高 IoU 阈值,增强高质量检测框性能。
DetectoRS、HTC、Sparse R-CNN…
持续在 backbone、proposal-free 设计、注意力机制等方面探索,推动检测性能与效率双提升。
五、YOLO
1、YOLO 概述
YOLO 系列模型由 Joseph Redmon 等人在 2016 年首次提出,其核心理念是将目标检测视为一个单一的回归问题——从整张图像直接回归出边界框坐标和类别概率,无需候选区域生成或后续分类器,因而具有极高的推理速度。自第一代 YOLO(YOLOv1)以来,YOLO 在速度与精度的权衡上持续改进,目前已发展到 YOLOv5、YOLOX、YOLOv7 乃至 Ultralytics 等多个分支。
2、基础网络结构(以 YOLOv1 为例)
YOLOv1 网络可分为三部分:
输入:整张 RGB 图像(例如 448×448)
│
24 层卷积 + 若干池化 → 特征图(7×7×1024)
│
卷积层降维(1×1 conv) → (7×7×B*(5+C))
│
重塑 → → S × S × (B×5 + C) 输出张量
S×S 网格划分
将输入图像划分为 S×S(如 7×7)个网格,每个网格只预测 B(如 2)个边界框及对应置信度,以及 C(如 20)类的条件概率。每个网格输出
边界框参数:4 个坐标 (x,y,w,h),相对于网格单元归一化;
置信度:
;
类别概率:
,通过 Softmax 输出。
3、关键技术点
单阶段回归检测
与两阶段(R-CNN 系列)不同,YOLO 仅一次网络前向就直接预测边框与类别,避免重复特征计算,极大提高速度。
统一损失函数
通过对坐标、置信度、类别三部分加权求和,实现回归与分类的联合优化。
采用
和
调节正负样本损失权重。
多尺度预测
后续版本(YOLOv2、YOLOv3)在不同尺度上预测特征图(如 13×13、26×26、52×52),更好地检测大、中、小目标。
引入 Feature Pyramid Network(FPN)思想,通过上采样与跳跃连接融合多层特征。
Anchor 机制(YOLOv2 及之后)
为每个网格预定义 K 个 anchor(典型为 5),每个 anchor 预测偏移量,增强对不同长宽比目标的适应性。
Anchor 尺度通过 k-means 聚类数据集标注框获得。
Darknet 主干网络
YOLOv2 引入 Darknet-19,YOLOv3 升级为 Darknet-53,均采用大量 3×3、1×1 卷积与残差连接,兼顾速度与表达能力。
4、训练与推理流程
训练阶段
数据增强:随机缩放、裁剪、翻转、色彩变换等,提升鲁棒性;
预训练:先在 ImageNet 上预训练主干网络;
微调:在 COCO 或 VOC 等检测数据集上微调全网权重;
学习率策略:采用阶梯衰减或余弦退火等动态调整。
推理阶段
输入预处理:统一缩放到固定尺寸(如 416×416)并归一化;
单次前向:网络输出多尺度或单尺度预测张量;
解码边框:根据网格、anchor 与网络预测偏移,恢复为原图坐标;
置信度过滤 & NMS:剔除低置信度(如 <0.5)预测,按类别进行非极大值抑制,输出最终检测结果。
5、优缺点分析
优点
极高速度:YOLOv3 在 GPU 上可达 45 FPS(416×416),适合实时应用;
端到端训练:无须外部候选框算法,框架简洁;
统一回归:检测与定位同框完成,模型紧凑。
缺点
定位精度较低:尤其小目标与重叠目标,因网格划分粗糙导致漏检或定位偏差;
类别不平衡:前背景样本差异大,YOLOX 等后续通过 Decoupled Head、SimOTA 策略改进;
尺度泛化:早期版本单尺度预测,对不同分辨率目标兼容性差。
6、后续演进与分支
YOLOv4 / YOLOv5(2020)
引入 CSPDarknet、Mosaic 数据增强、CIoU Loss、SPP 模块、PANet 等技术,进一步提升精度与速度平衡。
YOLOX(2021)
采用 anchor-free 设计,Decoupled Head、SimOTA 训练方案、EMA、SiLU 激活;
在 COCO 上取得 AP 50:50–95 达到 50+ 的水平。
YOLOv7 / YOLOv8(2022–2023)
发布多项结构与训练技巧创新,如 E-ELAN、Dynamic Head、自动混合精度;
Ultralytics YOLOv8 以 PyTorch 实现,接口友好并支持多任务(分类、检测、分割、分割跟踪)。
六、SSD
1、模型动机
SSD 于 2016 年由 Wei Liu 等人提出,旨在在保持较高检测精度的同时,实现真正的单阶段、单次前向检测。相比于两阶段方法(Faster R-CNN)和早期单阶段方法(YOLOv1/2):
两阶段:精度高但慢;
YOLOv1:速度快但对小目标、聚集目标精度不足;
SSD:引入多尺度特征图与多比例默认框(default boxes),在速度和精度间取得平衡。
2、网络整体结构
主干网络(Backbone)
通常选用 VGG16 (去掉最后的池化层和全连接层)作为基础特征提取器。
在 conv4_3、fc7(通过 1×1+3×3 conv 将原 fc6/fc7 转为卷积层)等多层均保留特征。
附加特征层(Extra Feature Layers)
在 backbone 之后,依次添加若干卷积层(例如 conv8_2、conv9_2、…conv11_2),每层特征图分辨率依次减半。
例如 SSD300 在输入 300×300 时,依次产生 38×38、19×19、10×10、5×5、3×3、1×1 的特征图。
多尺度预测(Multi-scale Prediction)
每个特征图位置生成若干个默认框(Default Boxes,也称 anchor):
不同宽高比(如 1:1、2:1、1:2、3:1、1:3);
不同尺度(结合当前层与下一层分辨率计算)。
并行预测:在每个位置,通过 3×3 卷积同时输出类别得分分支(K+1 个通道)和边框偏移分支(4 个通道 × default boxes 数量)。
输出张量
将所有尺度、所有位置、所有默认框的预测拼接,形成一个统一的输出向量,然后进行后处理(置信度过滤+NMS)。
3、关键技术点
Default Boxes 的设计
在第 m 个尺度特征图(大小
)上,定义 k 个默认框;每个默认框对应特定的尺度
和一组长宽比
。
默认框中心与特征图网格中心对齐,尺度按公式
线性计算。
多尺度、多比例覆盖
不同层的不同分辨率、不同框比例,联合覆盖各类大小和形状的目标。
conv4_3 层对小目标敏感;更深层对大目标更具语义。
端到端多任务损失
:平滑 L1 损失,对预测框偏移与对应 ground-truth 回归;
:分类交叉熵,对正负样本类别预测;
:指示默认框 i 与真实框 j 的匹配关系;
通过硬负例挖掘(Online Hard Example Mining)将负样本比例限制在正样本的 3 倍内,平衡训练。
硬负例挖掘
对所有未匹配正样本的默认框,按分类损失排序,挑选前
剩余框数
作为负样本,用于训练。
尺度归一化
对 conv4_3 层特征做 L2 正则化并乘以可学习缩放因子,以缓解浅层特征通道数较小、梯度传播不均的问题。
4、训练与推理流程
训练阶段
默认框与真实框匹配:IoU ≥ 0.5 的默认框标为正样本;后者随机补足。
计算损失:多任务损失按正负样本加权求和;
反向传播:同时优化 backbone、附加层、输出分支;
数据增强:随机裁剪、颜色抖动、翻转、缩放,提高模型鲁棒性。
推理阶段
单次前向:输入整图(如 300×300)→ 特征图 → 并行预测;
解码偏移:将网络学到的偏移还原到默认框,得到最终预测框坐标;
置信度过滤:丢弃低于阈值(如 0.5)的预测;
NMS:对每个类别执行非极大抑制,保留最高置信度的若干框。
5、性能与优缺点
| 模型 | 输入尺寸 | PASCAL VOC07 mAP | COCO AP@[.5:.95] | 推理速度(FPS@Titan X) |
|---|---|---|---|---|
| SSD300 | 300×300 | 77.5% | 23.2% | ~59 |
| SSD512 | 512×512 | 79.5% | 26.8% | ~22 |
优点
真正单阶段:无外部 proposal,速度快;
多尺度特征融合:对各大小目标均有较好覆盖;
端到端训练:简单统一的多任务优化。
缺点
小目标检测弱:300×300 分辨率下,对极小目标仍然不够敏感;
长尾样本不平衡:类别不均衡需额外策略;
依赖锚框设计:手工设定尺度与比例,需针对数据集调优。
6、后续演进
DSSD(2017)
在 SSD 基础上加入多尺度 deconvolution 和扩张卷积,提升小目标检测精度。
RefineDet(2018)
两段式单阶段:先粗略筛选,然后精细定位并分类,结合了两阶段与单阶段优点。
RetinaNet(2017)
引入 Focal Loss,解决极度正负样本不平衡,AP 表现超越 SSD。
YOLO 系列进化
后缀如 YOLOv4/5/6/7 在 anchor-free、解耦头、SimOTA 等方面不断优化,进一步推动单阶段检测性能。
七、DETR
1、动机背景
传统目标检测框架(R-CNN 系列、SSD、YOLO 等)大多依赖先验框(anchor)或候选区生成,并通过 NMS(非极大值抑制)来去重,实现复杂且多阶段的流水线训练。DETR(End-to-End Object Detection with Transformers)由 Facebook AI Research 于 2020 年提出,首创将 Transformer 架构直接应用于目标检测,实现端到端、无锚框、无 NMS 的统一检测框架。
2、整体架构概览
输入图片 → Backbone CNN → Flatten+Position Embedding → Transformer Encoder
↓
Transformer Decoder (object queries)
↓
线性头:分类分支 + 边框回归分支
↓
Hungarian Matcher + Set Prediction Loss → 端到端优化
Backbone CNN
通常使用 ResNet-50/101 等提取二维特征图(如 1/32 下采样尺寸的 C×H×W)。
位置编码与扁平化
将特征图扁平为长度为
的序列,并加上可学习的 2D 位置编码。
Transformer Encoder
多层自注意力(Multi-Head Self-Attention)+ 前馈网络,对图像特征进行全局上下文建模。
Transformer Decoder
预设 M 个object queries(可学习向量),每个 query 通过交叉注意力(Cross-Attention)“查询”编码器输出,生成对一个目标的预测。
输出 Head
对每个 query 输出一个 (C+1)-维分类分数(包含背景类“无目标”)和一个 4 维边框坐标(归一化到 [0,1])。
集匹配损失(Set Prediction Loss)
采用匈牙利算法(Hungarian Matching)将 M 个预测与真实目标进行一一匹配;
匹配后,对分类和回归损失进行加权求和,端到端反向传播,无需 NMS。
3、核心组件详解
(1)Object Queries
预定义 M 个长度为 d 的向量(如 M=100,d=256),并随训练学习;
每个 query 在 decoder 中与编码器特征做多轮交互,最终对应一个检测框或“空”(no object)。
(2)注意力机制
自注意力(Self-Attention):在 encoder/decoder 内部,建模各位置与各 query 之间的全局关系;
交叉注意力(Cross-Attention):decoder 中,query 对编码器所有位置的加权聚合,学习“在哪里有物体”。
(3)位置编码(Positional Encoding)
将二维网格位置映射为与特征同维度的向量,并与特征相加;
保持空间位置信息,使注意力机制区分不同区域。
(4)匈牙利匹配(Hungarian Matching)
对 M 个预测与 K 个 ground-truth 目标,构建 M×K 的匹配成本矩阵:
结合分类是否正确与边框回归误差,用匈牙利算法求最优一一匹配对;
未匹配的预测被视为背景(类别损失只计算为“无目标”)。
(5)Set Prediction Loss
匹配后,对每对 (i,j) 预测与真实目标计算:
分类损失:交叉熵;
回归损失:平滑
+ GIoU Loss(在 DETR 后续版本中引入)。
损失总和:
4、训练与推理流程
训练
将批量图像送入 backbone,提取特征并加位置编码;
编码器多层自注意力处理,得到全局特征表示;
decoder 交叉注意力将 object queries 转化为 M 条预测;
匈牙利匹配,计算 set prediction loss;
端到端反向传播,更新 backbone、Transformer、object queries。
推理
单次前向得到 M 个分类分数与边框;
选取分类分数最高的前 N′ 条(如 top-100)非背景预测;
直接输出,无需 NMS。
5、优缺点对比
| 方面 | 优势 | 局限 |
|---|---|---|
| 简洁性 | 端到端一体化,无需候选框、锚框、NMS 等繁琐步骤 | 训练收敛慢,需大批量数据和更长训练 |
| 全局交互 | Transformer 自注意力学习全局上下文,利于复杂场景下检测 | 计算与内存开销高,尤其大分辨率/大特征图尺寸时 |
| 可扩展性 | 容易结合多任务(如 Mask DETR、Deformable DETR、Conditional DETR 等) | 原始 DETR 在小目标检测、密集目标场景(人群、车流)效果欠佳 |
| 推理效率 | 无需 NMS,后处理简单 | Transformer decoder 层数和 query 数量直接影响推理速度 |
6、后续改进与演进
Deformable DETR
引入可学习的可变形 attention,仅在若干关键位置采样特征,大幅加速收敛和推理。
Conditional DETR
将位置信息条件化注入 decoder 查询,增强查询与特征的对齐,加速训练收敛。
DN-DETR (Denoising DETR)
在训练中加入带噪声的查询与目标标签对,用“去噪”任务辅助收敛。
Mask-DETR
在 DETR 基础上加上实例分割分支,实现端到端的检测+分割。
Sparse DETR / Efficient DETR
通过稀疏化多头注意力或采用更轻量设计,降低计算量,提升推理速度。