想了解更多,请查看 官方文档 : 点击查看
1. 基础层:
nn.Linear: 全连接层,用于定义线性变换nn.Conv1d,nn.Conv2d,nn.Conv3d: 1D、2D 和 3D 卷积层nn.MaxPool1d,nn.MaxPool2d,nn.MaxPool3d: 最大池化层nn.AvgPool1d,nn.AvgPool2d,nn.AvgPool3d: 平均池化层
2. 激活函数:
nn.ReLU: ReLU(Rectified Linear Unit)激活函数nn.Tanh: 双曲正切激活函数nn.Sigmoid: Sigmoid 激活函数nn.Softmax: Softmax 激活函数
3. 正则化层:
nn.Dropout: 随机失活,用于防止过拟合nn.BatchNorm1d,nn.BatchNorm2d,nn.BatchNorm3d: 批标准化层
8类卷积操作
1、(Vanilla)Convolution (普通)卷积
卷积输出的 尺寸的计算公式 :
其中,输入的尺寸为 (),卷积核的尺寸为 (
),步幅为(
),填充为(
),输出的尺寸为(
)
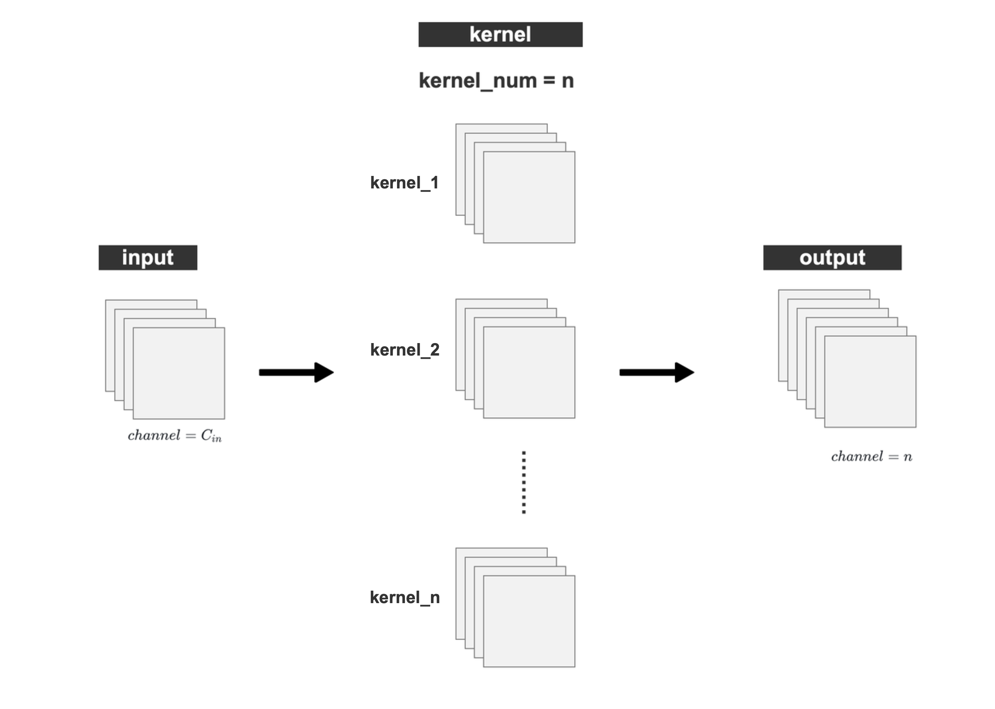
2、Group Convolution 分组卷积
Group convolution(分组卷积)最早是在AlexNet(Alex Krizhevsky等人于2012年提出的深度神经网络模型)中引入的。在 AlexNet中,作者们使用了分组卷积来将计算分布到多个GPU上。
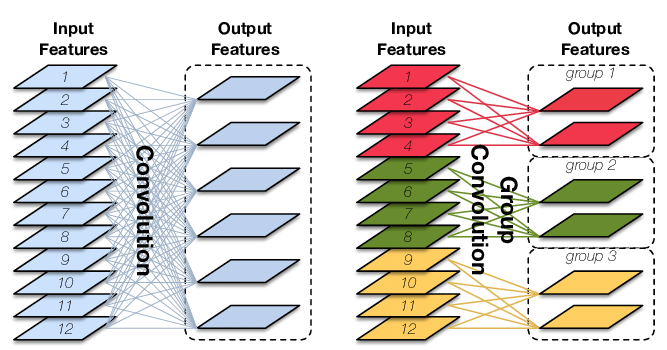
Group Convolution :将输入 feature map 在 channel 的维度上进行分组,然后再对每个分组 分别进行卷积操作
Group Convolution 可减小参数量。 如下图,假设输入尺寸为 ,卷积核尺寸为
,输出的 Channel 数为 n,我们分别使用 普通卷积 和 分组卷积来进行操作,并对比两种卷积方式的参数量
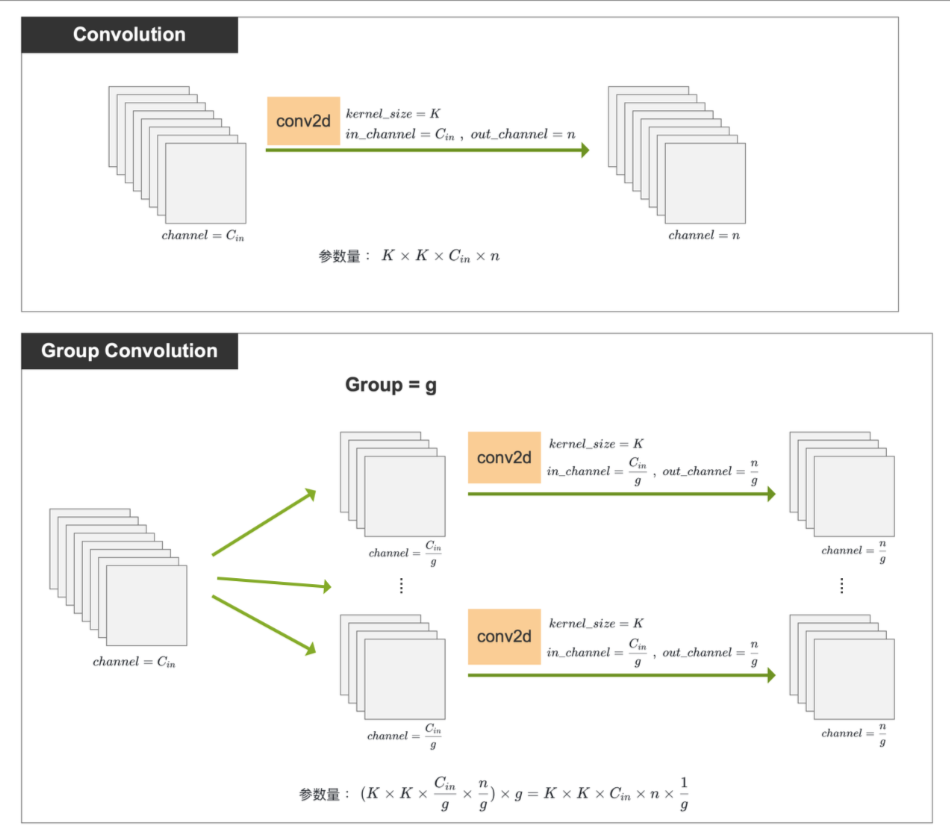
由上可知 :Group Convolution 的参数量 是普通卷积参数量的
** 特殊情况 : 当分组数量 g 等于输入channel 数量,Group Convolution 就等价于 Depthwise Convolution。
代码示例:
使用 torch.nn.conv2d(),并通过参数 groups 指定组数
in_channels 和 out_channels 都必须可以被 groups 整除,否则会报错, 类似 :ValueError: in_channels must be divisible by groups
import torch
import torch.nn as nn
conv = nn.Conv2d(in_channels=10, out_channels=15, kernel_size=3, groups=5, stride=1, padding=1)
output = conv(torch.rand(1, 10, 20, 20))
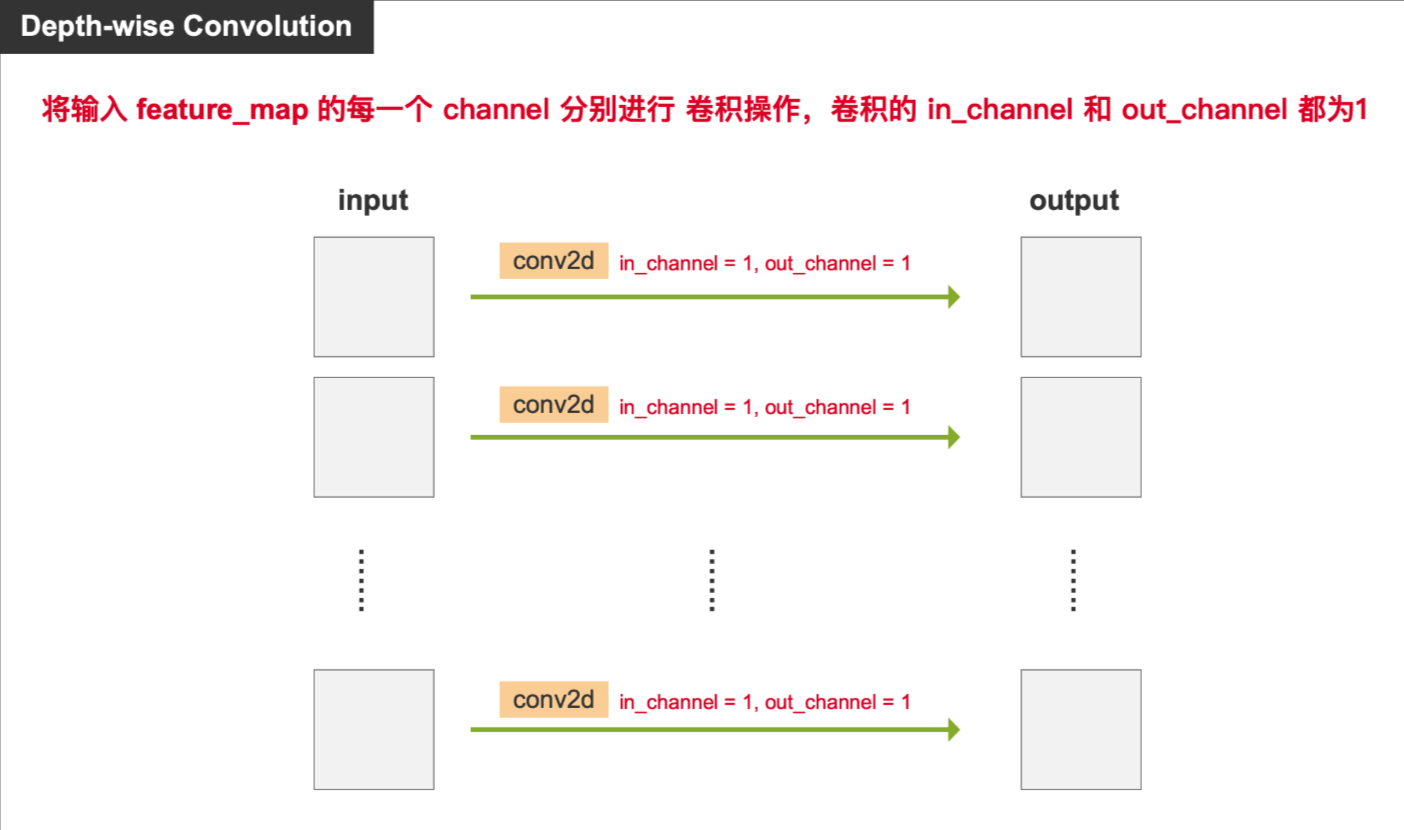
print(output.shape) # torch.Size([1, 15, 20, 20])3、Depth-wise Convolution 逐深度卷积
将输入图像 的每一个 channel 分别进行 卷积操作,卷积的 in_channel 和 out_channel 都为1
使用 DW Convolution,输出的 channel 和 输入 channel一样
当 group Convolution 的组数等于 输入 channel 时,即
时 ,就是 Depth-wise convolution
优点 :参数量和计算量小
代码示例 : 将 nn.Conv2d 的参数 out_channels 和 groups 都设置为等于 in_channels
import torch
import torch.nn as nn
conv = nn.Conv2d(in_channels=10, out_channels=10, kernel_size=3, groups=10, stride=1, padding=1)
output = conv(torch.rand(1, 10, 20, 20))
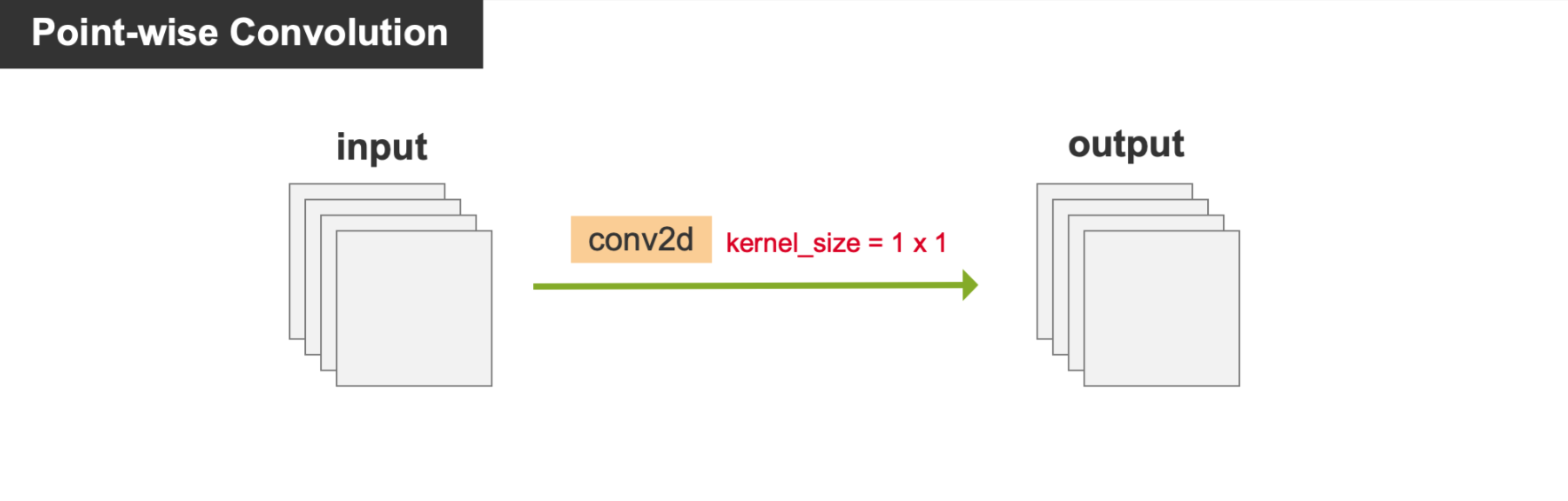
print(output.shape) # torch.Size([1, 10, 20, 20])4、Point-wise Convolution 逐点卷积
就是普通卷积,只不过 kernel_size=1x1,也就是我们经常看到的 conv 1x1, 它通常用来组合通道之间的特征信息
优点 :参数量和计算量小
代码示例 : 将 nn.Conv2d 的参数 kernel_size 设置为等于 1
import torch
import torch.nn as nn
conv = nn.Conv2d(in_channels=10, out_channels=10, kernel_size=1, stride=1)
output = conv(torch.rand(1, 10, 20, 20))
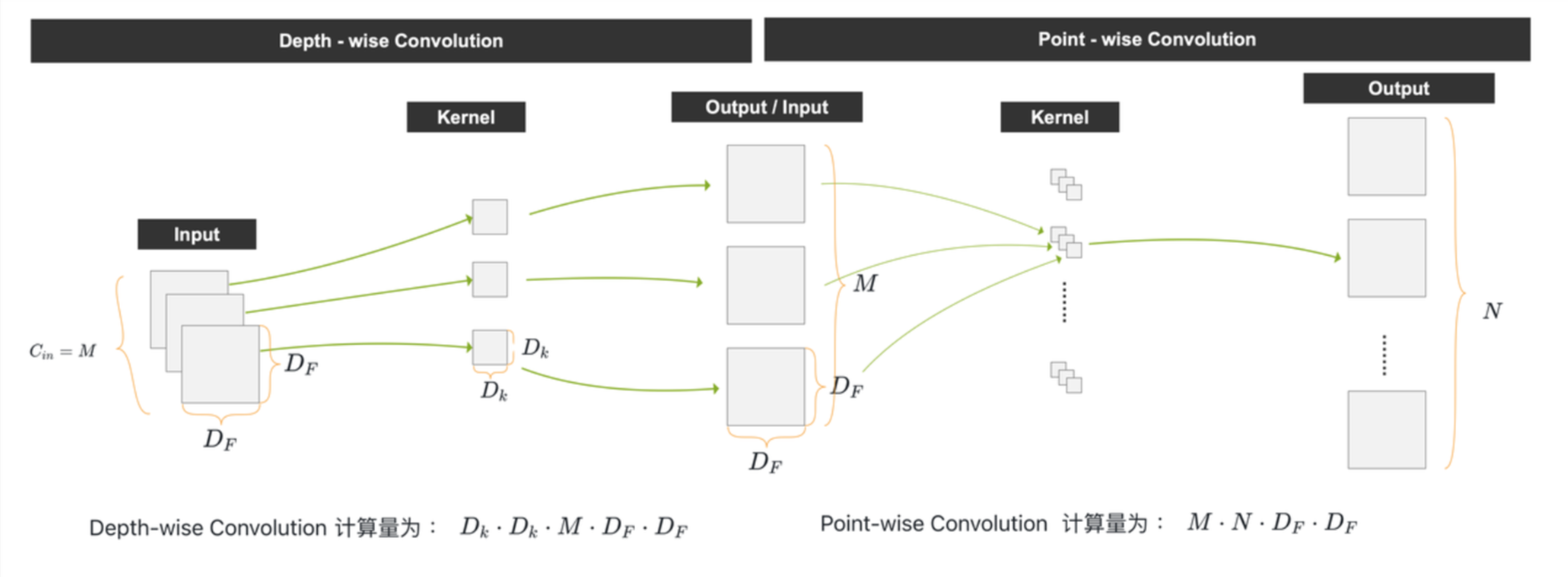
print(output.shape) # torch.Size([1, 10, 20, 20])5、Depth-wise Separable Convolution 深度可分离卷积
Depth-wise Separable Convolution(深度可分离卷积)最早是由Google的研究团队在2014年提出的。该方法首次出现在论文《MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications》中
Depth-wise Separable Convolution 就是先做一个 Depth-wise Convolution ,后面再做一个 Point-wise Convolution (或者 先做一个 Depth-wise Convolution ,后面再做一个 Point-wise Convolution )
他的优势是 极大的减小了卷积的计算量
(1)对于普通卷积而言,计算量为 (公式1):
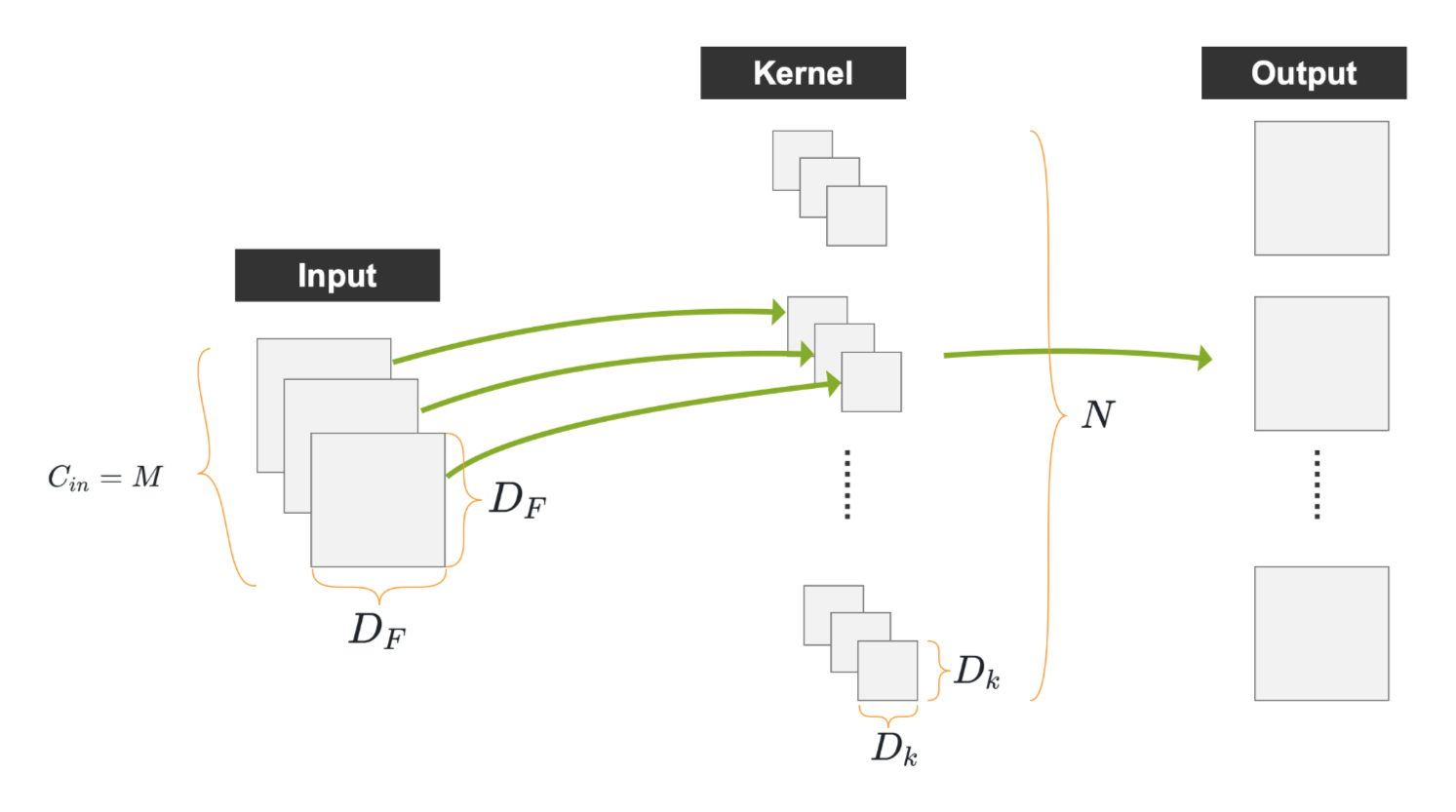
(2)Depth-wise Separable Convolution,计算量为(公式2) :
其中:
对于 Depth-wise Convolution,计算量为 :
对于 Point-wise Convolution ,计算量为 :
为了对比 普通卷积和深度可分离卷积的计算量,我们用公式(2) 除以公式(1) :
通常,我们在使用卷积的时候,使用的最多的还是 的卷积,即
,所以,上面的公式(3),一般等于:
所以,理论上,普通卷积的计算量是 深度可分离卷积计算量的 8倍 ~ 9倍
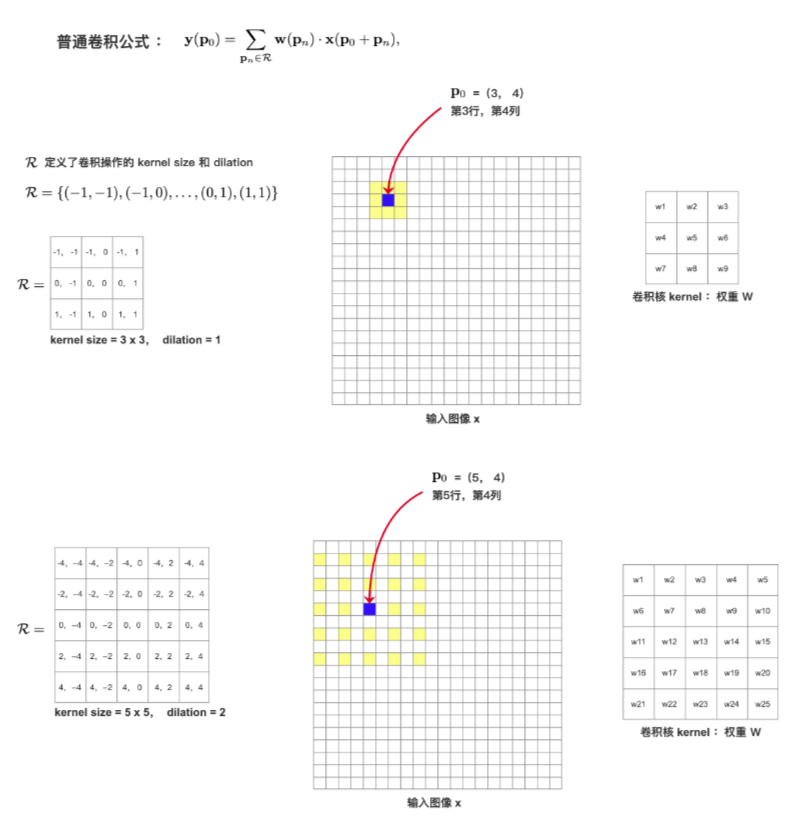
6、Dilation Convolution 膨胀卷积
Dilation Convolution 称为 空洞卷积 或 膨胀卷积,其通过在卷积核的元素之间引入间隔(dilation),从而增大了卷积核的感受野。
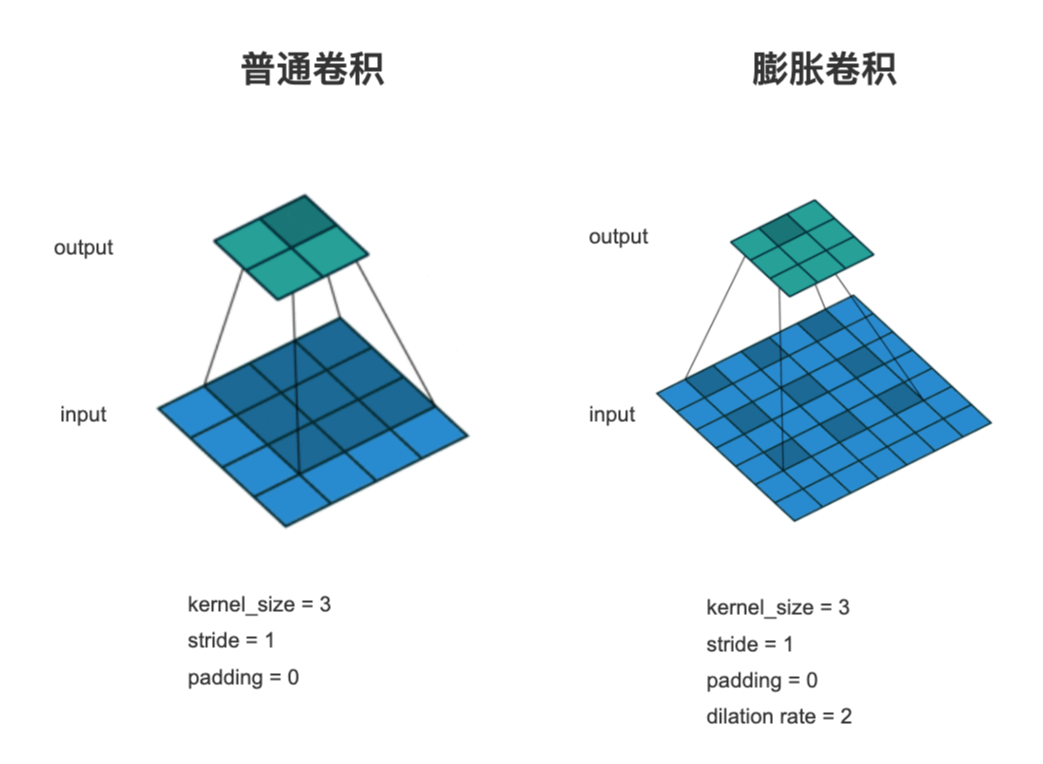
当 dilation=1 时,是普通卷积
当 dilation=2 时,卷积核元素中间间隔一个像素
依此类推
代码示例:指定参数 dilation
import torch
import torch.nn as nn
conv = nn.Conv2d(in_channels=10, out_channels=10, kernel_size=3, stride=1, padding=2, dilation=2)
output = conv(torch.rand(1, 10, 20, 20))
print(output.shape) # torch.Size([1, 10, 20, 20])7、Transposed Convolution 转置卷积
转置卷积也是卷积, 只不过转置卷积 是一种上采样操作
如下图的 转置卷积所示,输入图像尺寸为 2x2, 输出图像的尺寸为 4x4
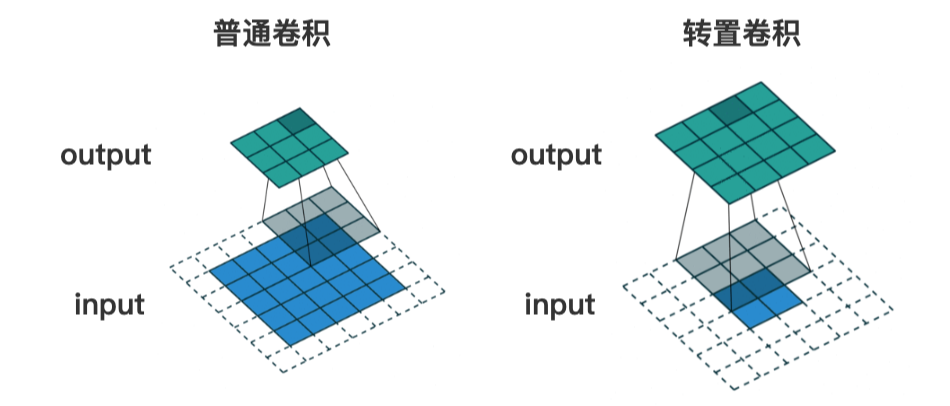
(1)如何设置 转置卷积 的 stride 和 padding
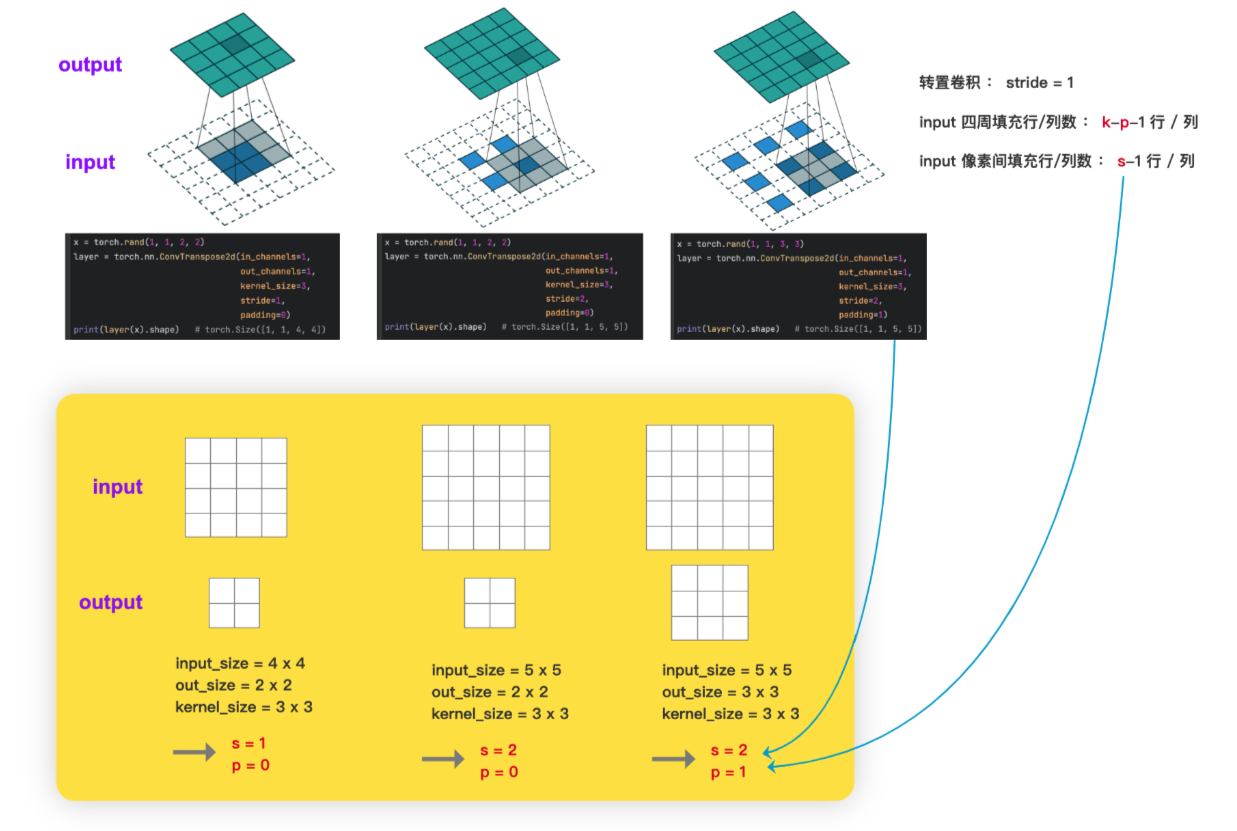
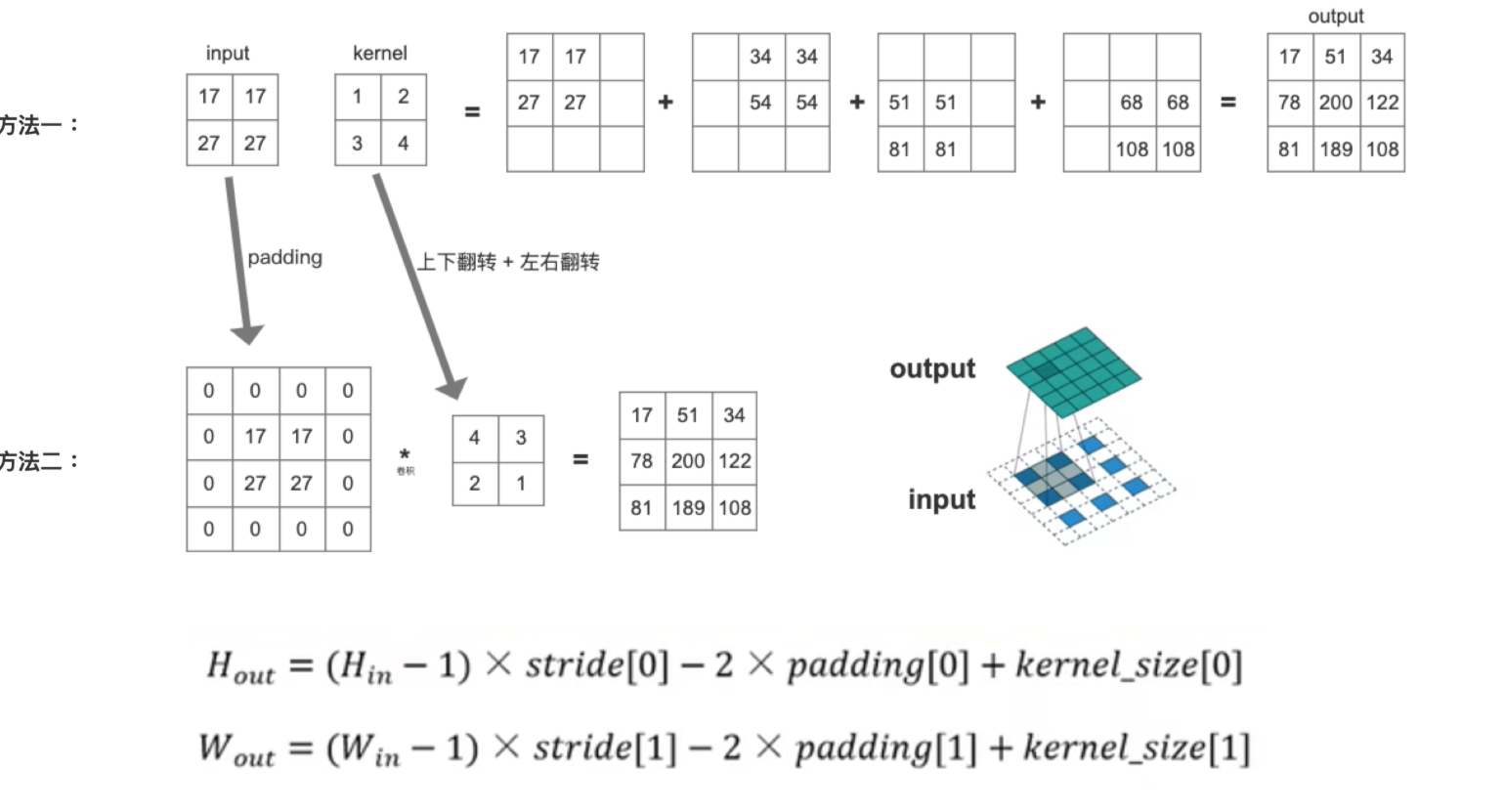
(2)已知 input 和 kernel,求 output
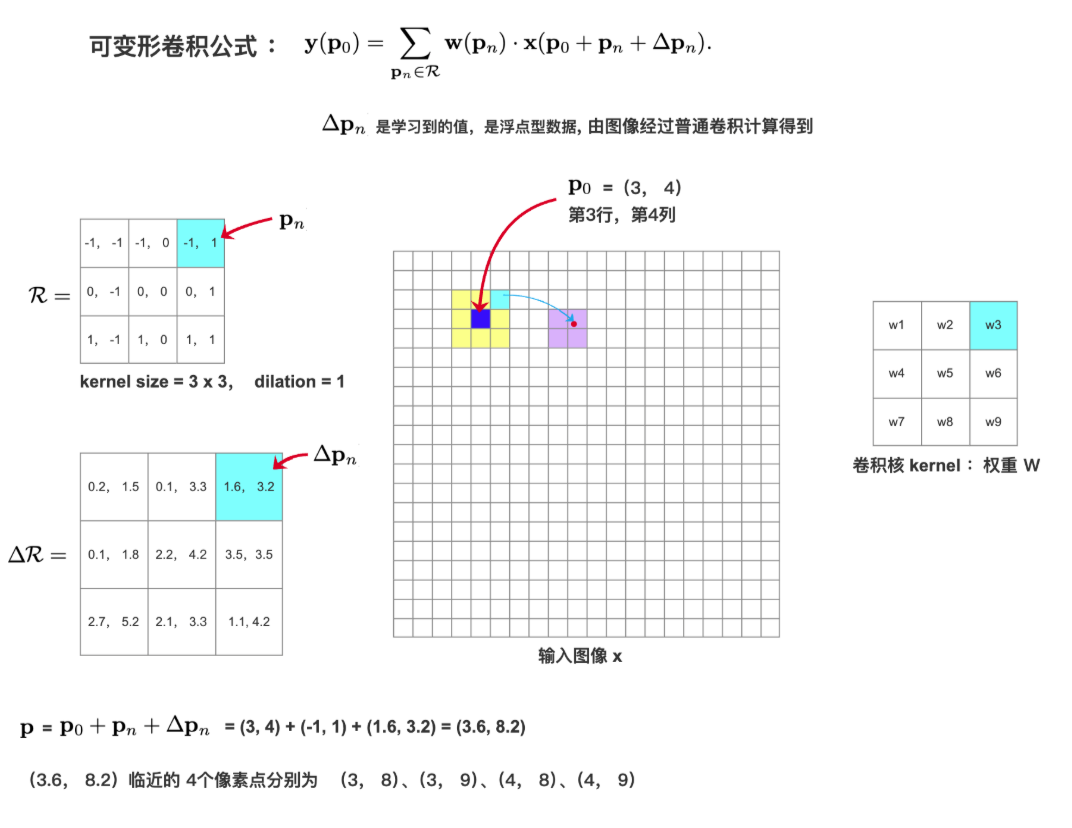
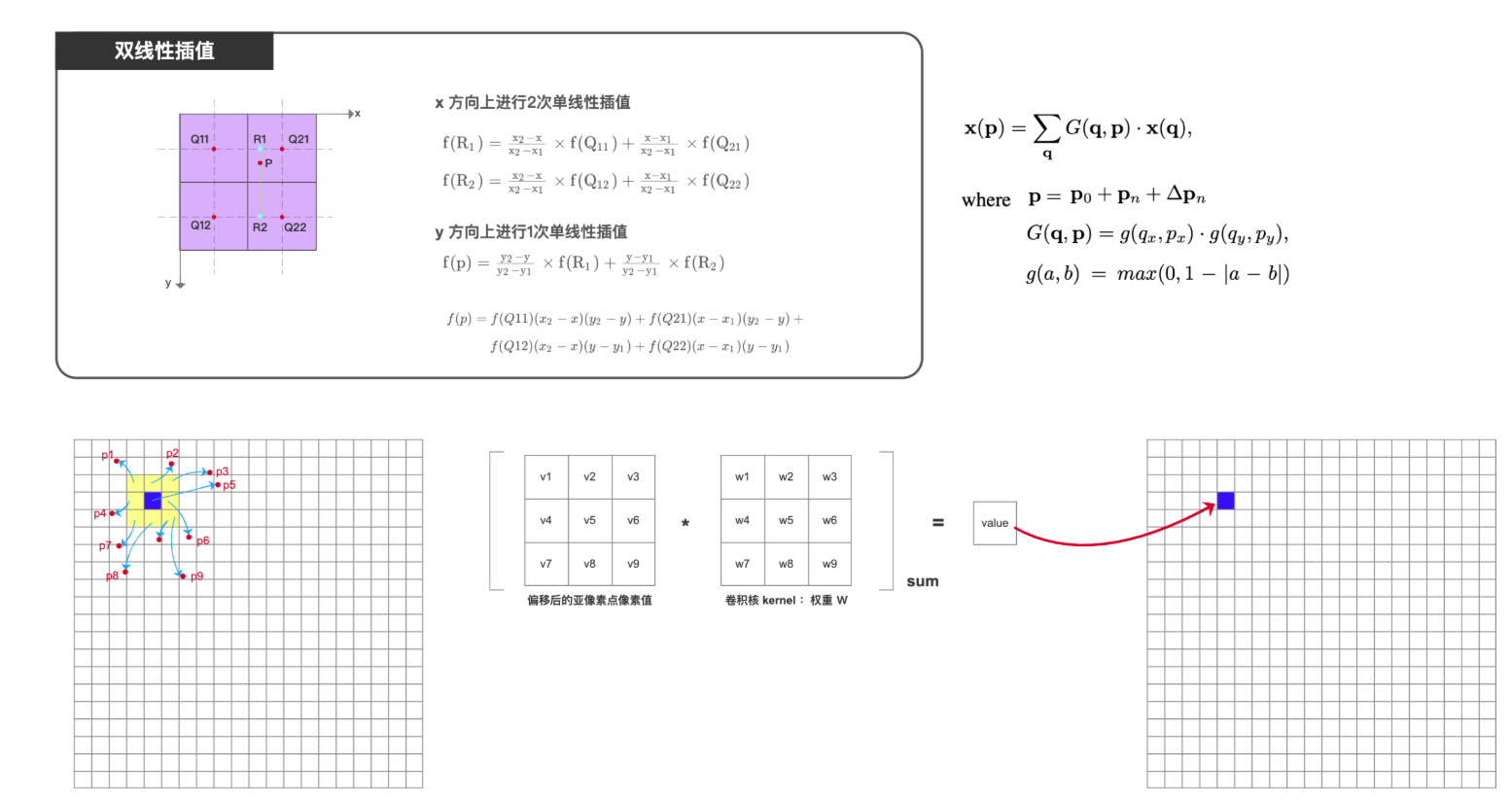
8、Deformable Convolution 可变形卷积
BatchNormlization
1、作用
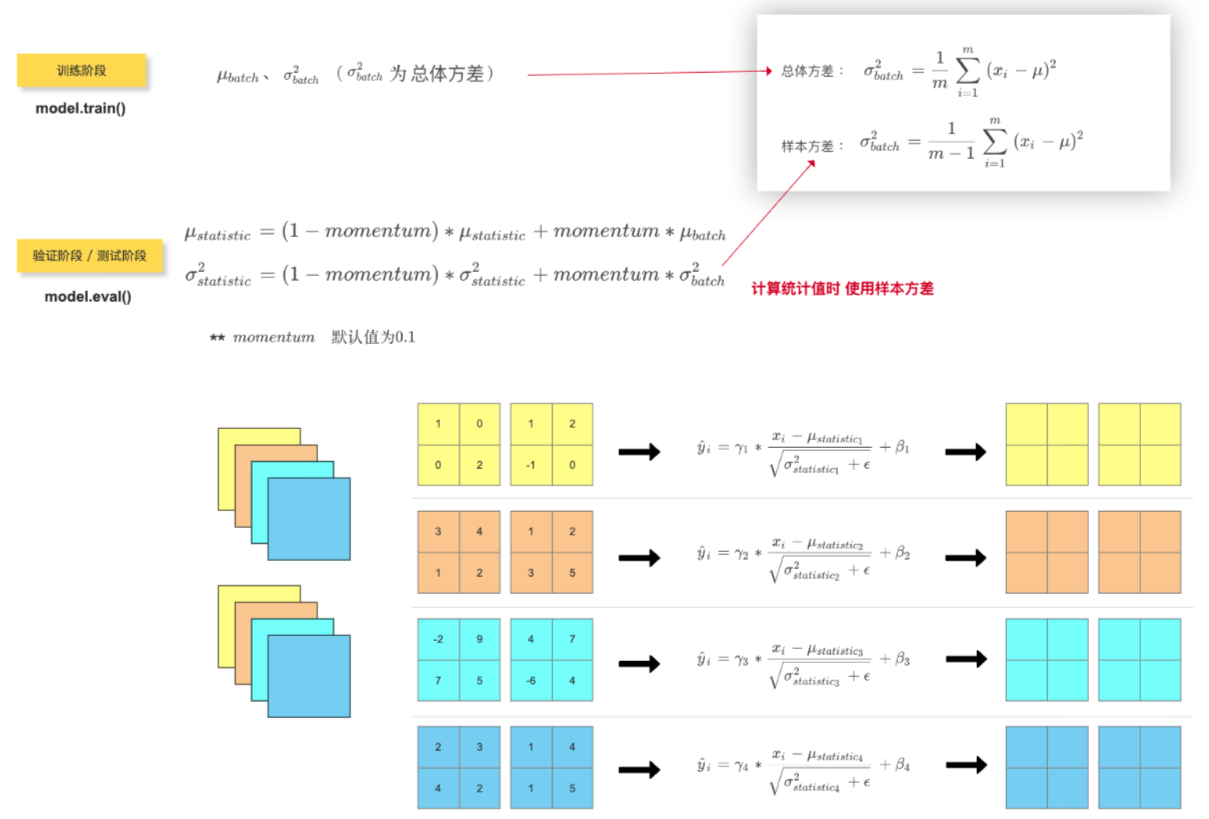
2、计算方式
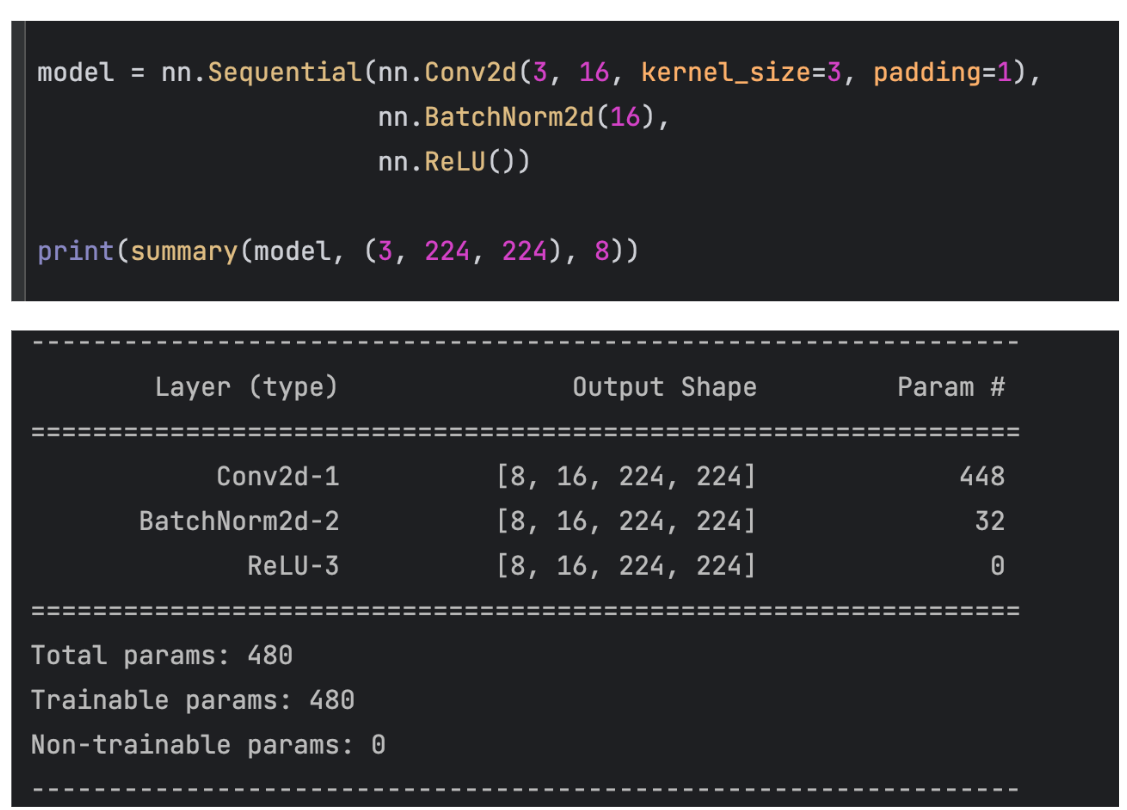
3、查看BN 层中的参数数量
BN层中有 weight 和 bias 两个参数(也就是上面计算方式 中的 gamma 和 beta)
如下代码中,BN层输入的 channel数为 16,每个 channel 有 2个可学习参数,一共有32个可学习参数
4、验证阶段 / 测试阶段的Batch Normalization
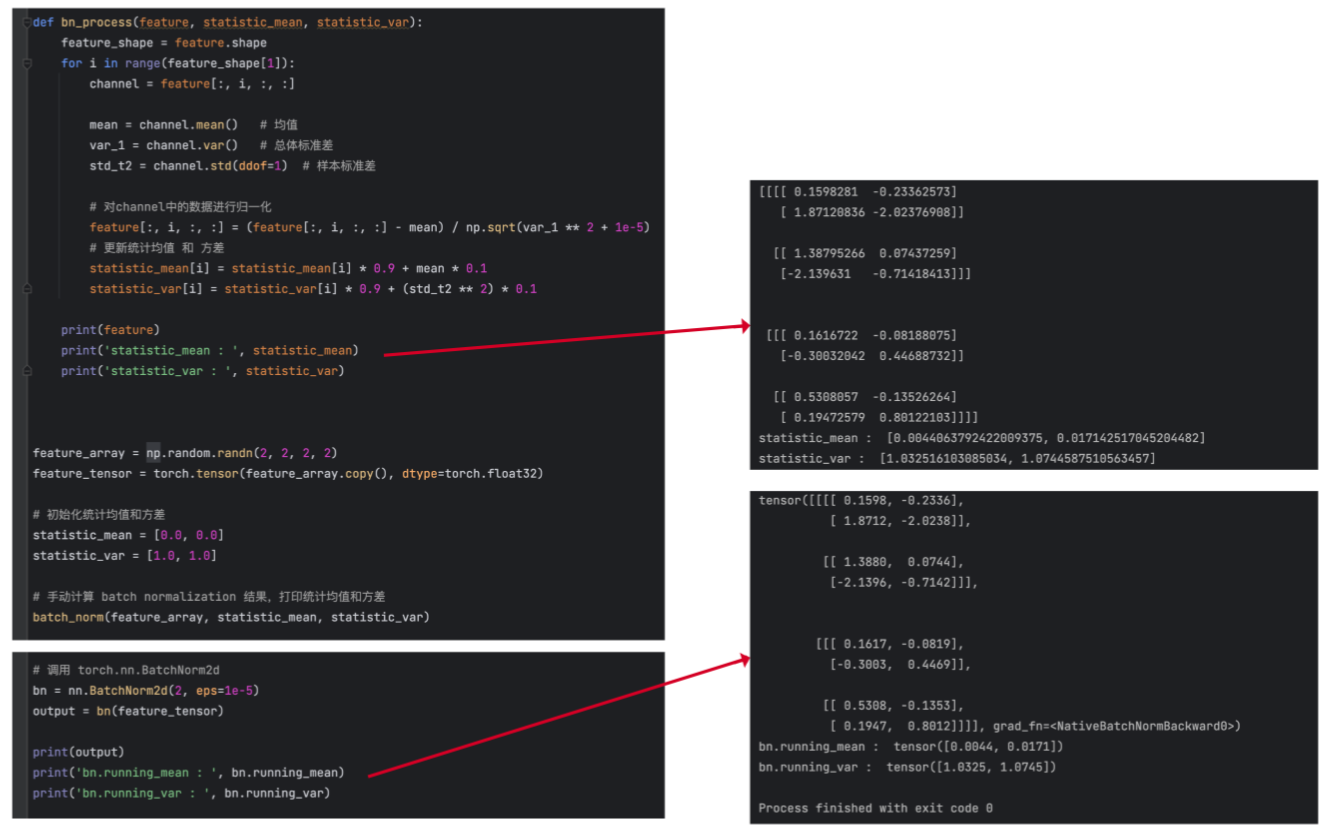
证明一下,自己手动计算出的 BN层的统计均值和统计方差 和调用 nn.BatchNorm() 计算结果一致
import numpy as np
import torch.nn as nn
import torch
def batch_norm(feature, statistic_mean, statistic_var):
feature_shape = feature.shape
for i in range(feature_shape[1]):
channel = feature[:, i, :, :]
mean = channel.mean() # 均值
std_1 = channel.std() # 总体标准差
std_t2 = channel.std(ddof=1) # 样本标准差
# 对channel中的数据进行归一化
feature[:, i, :, :] = (channel - mean) / np.sqrt(std_1 ** 2 + 1e-5)
# 更新统计均值 和 方差
statistic_mean[i] = statistic_mean[i] * 0.9 + mean * 0.1
statistic_var[i] = statistic_var[i] * 0.9 + (std_t2 ** 2) * 0.1
print(feature)
print('statistic_mean : ', statistic_mean)
print('statistic_var : ', statistic_var)
feature_array = np.random.randn(2, 2, 2, 2)
feature_tensor = torch.tensor(feature_array.copy(), dtype=torch.float32)
# 初始化统计均值和方差
statistic_mean = [0.0, 0.0]
statistic_var = [1.0, 1.0]
# 手动计算 batch normalization 结果,打印统计均值和方差
batch_norm(feature_array, statistic_mean, statistic_var)
# 调用 torch.nn.BatchNorm2d
bn = nn.BatchNorm2d(2, eps=1e-5)
output = bn(feature_tensor)
print(output)
print('bn.running_mean : ', bn.running_mean)
print('bn.running_var : ', bn.running_var)
5、模型中BN层的使用节点

这种顺序之所以能够效果良好,是因为批量归一化能够使得输入分布均匀,而 ReLU 又能够将分布中的负值清除,从而达到更好的效果。
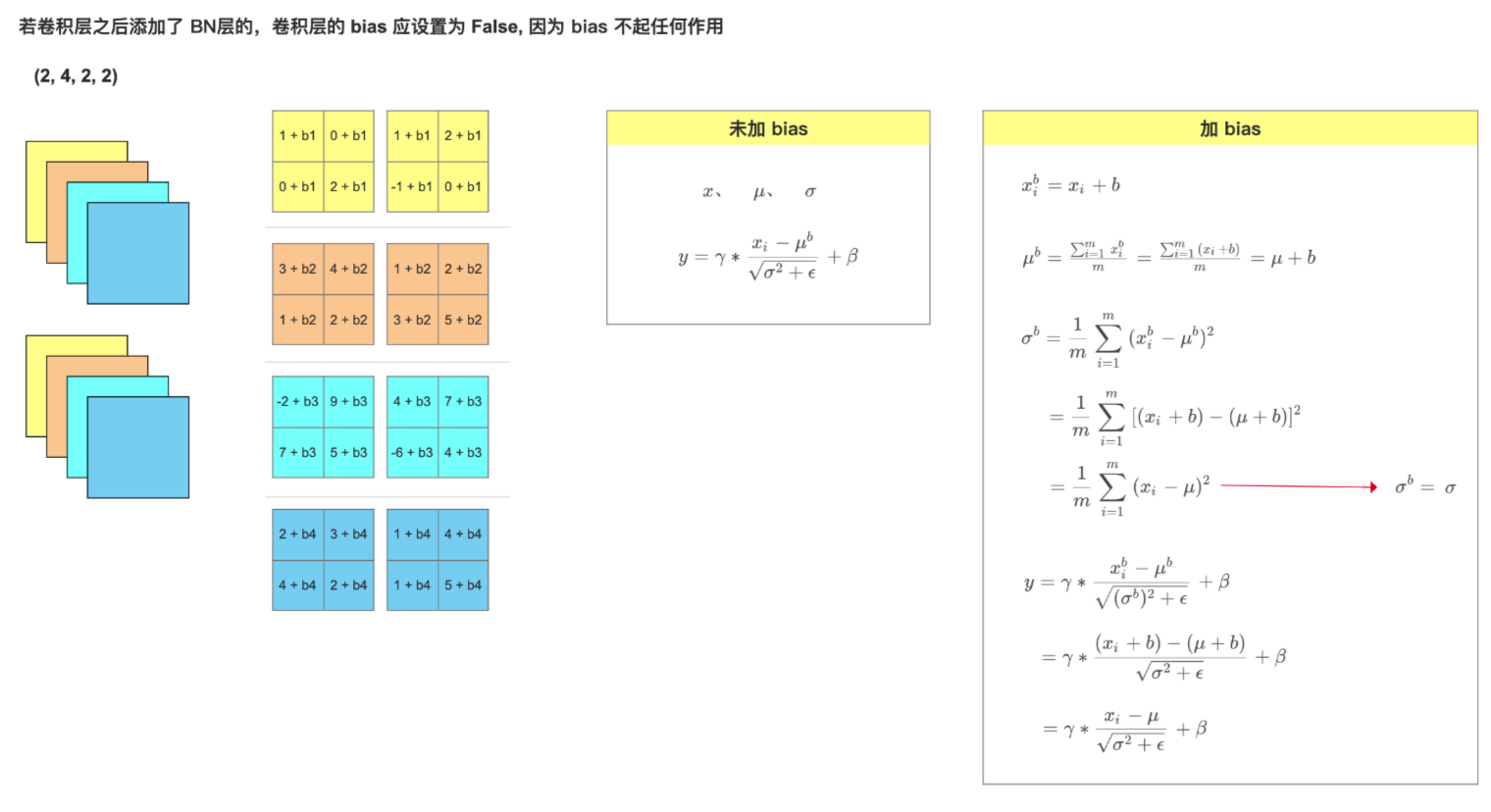
6、BN层对卷积层的影响
BatchNorm、LayerNorm、GroupNorm
1、BatchNorm
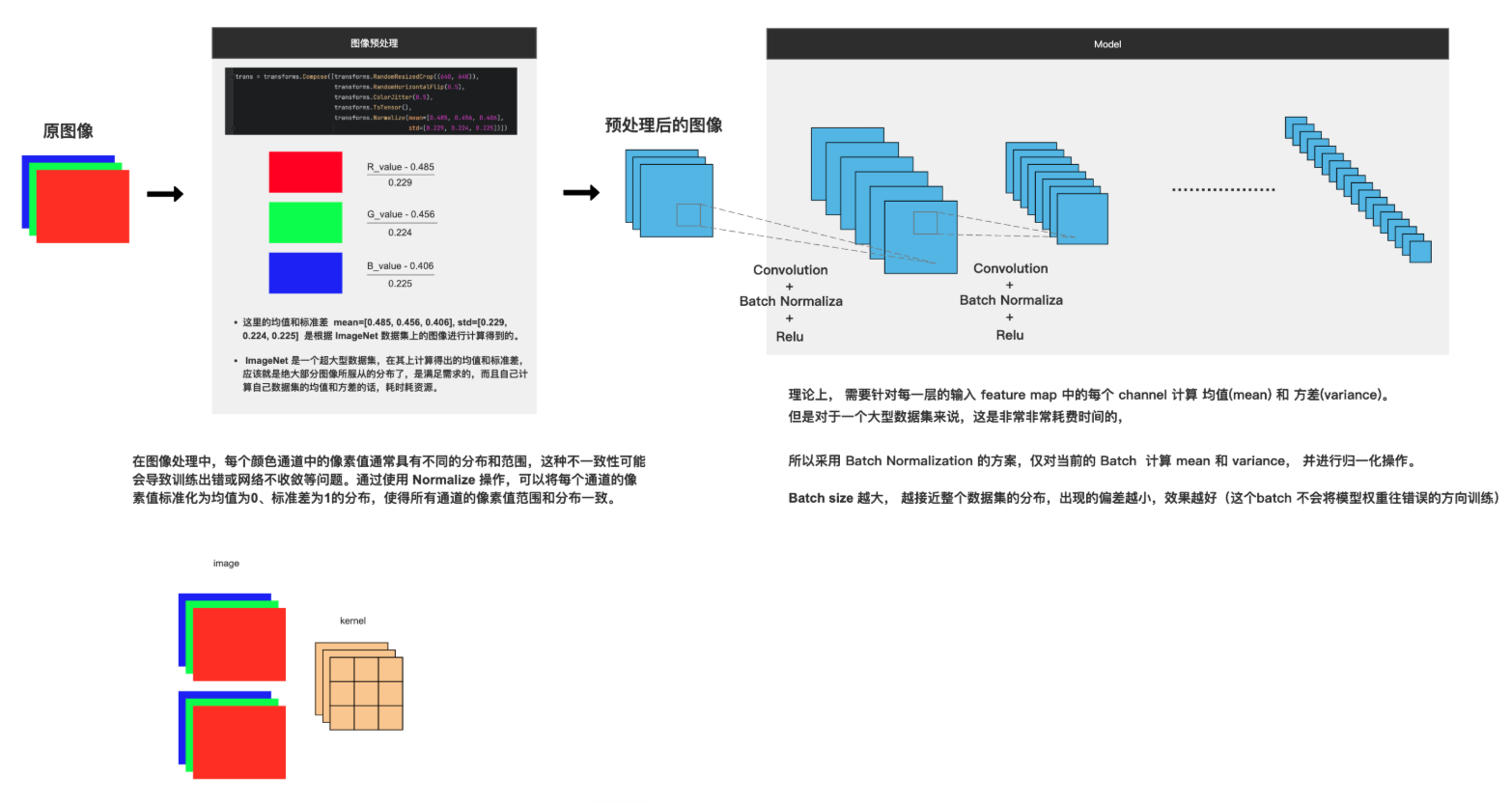
BatchNorm、LayerNorm 和 GroupNorm 都是深度学习中常用的归一化方式。
它们通过将输入归一化到均值为 0 和方差为 1 的分布中,来防止梯度消失和爆炸,并提高模型的泛化能力。
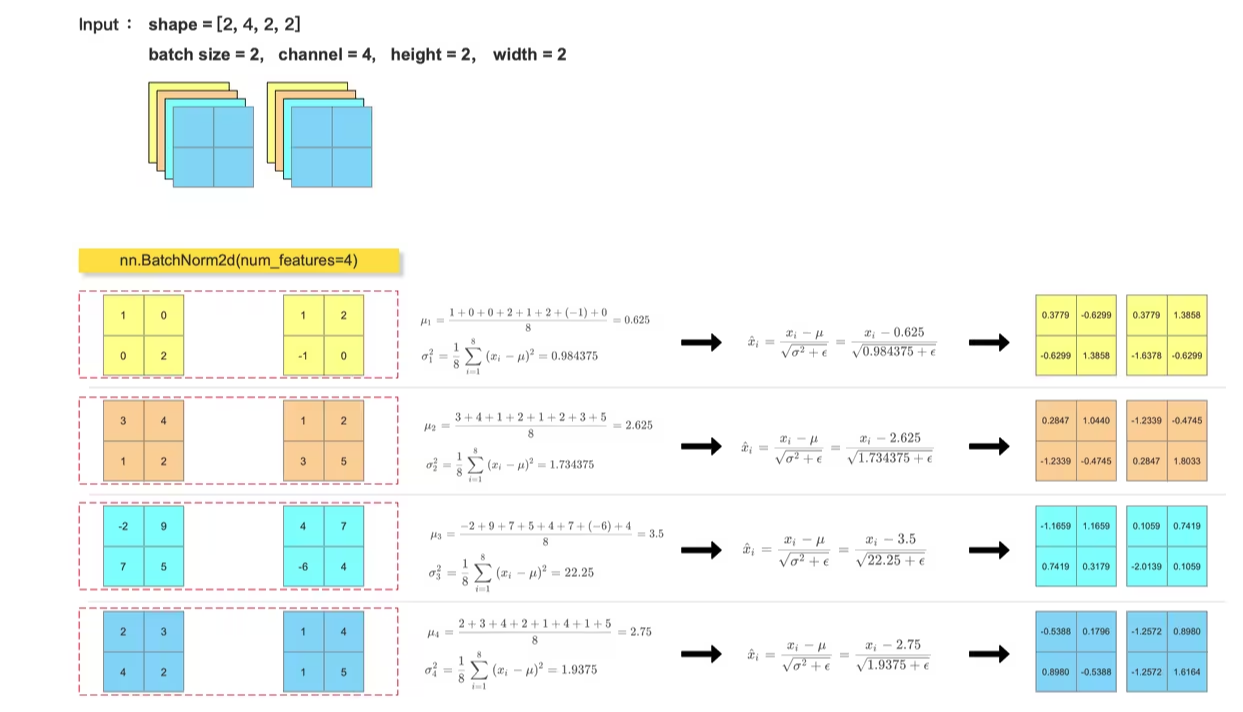
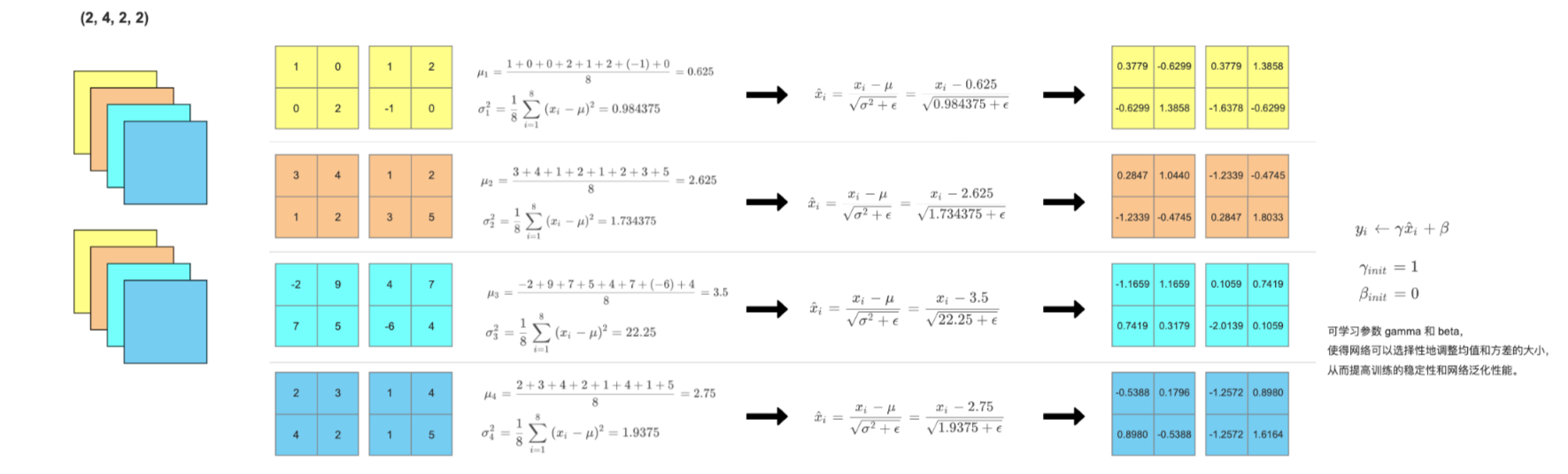
对比手动计算的 BN层输出结果 和 调用 nn.BatchNorm() 的输出结果
import torch
import torch.nn as nn
import numpy as np
feature_array = np.array([[[[1, 0], [0, 2]],
[[3, 4], [1, 2]],
[[-2, 9], [7, 5]],
[[2, 3], [4, 2]]],
[[[1, 2], [-1, 0]],
[[1, 2], [3, 5]],
[[4, 7], [-6, 4]],
[[1, 4], [1, 5]]]], dtype=np.float32)
feature_tensor = torch.tensor(feature_array.copy(), dtype=torch.float32)
bn_out = nn.BatchNorm2d(num_features=4, eps=1e-5)(feature_tensor)
print(bn_out)
for i in range(feature_array.shape[1]):
channel = feature_array[:, i, :, :]
mean = feature_array[:, i, :, :].mean()
var = feature_array[:, i, :, :].var()
print(mean)
print(var)
feature_array[:, i, :, :] = (feature_array[:, i, :, :] - mean) / np.sqrt(var + 1e-5)
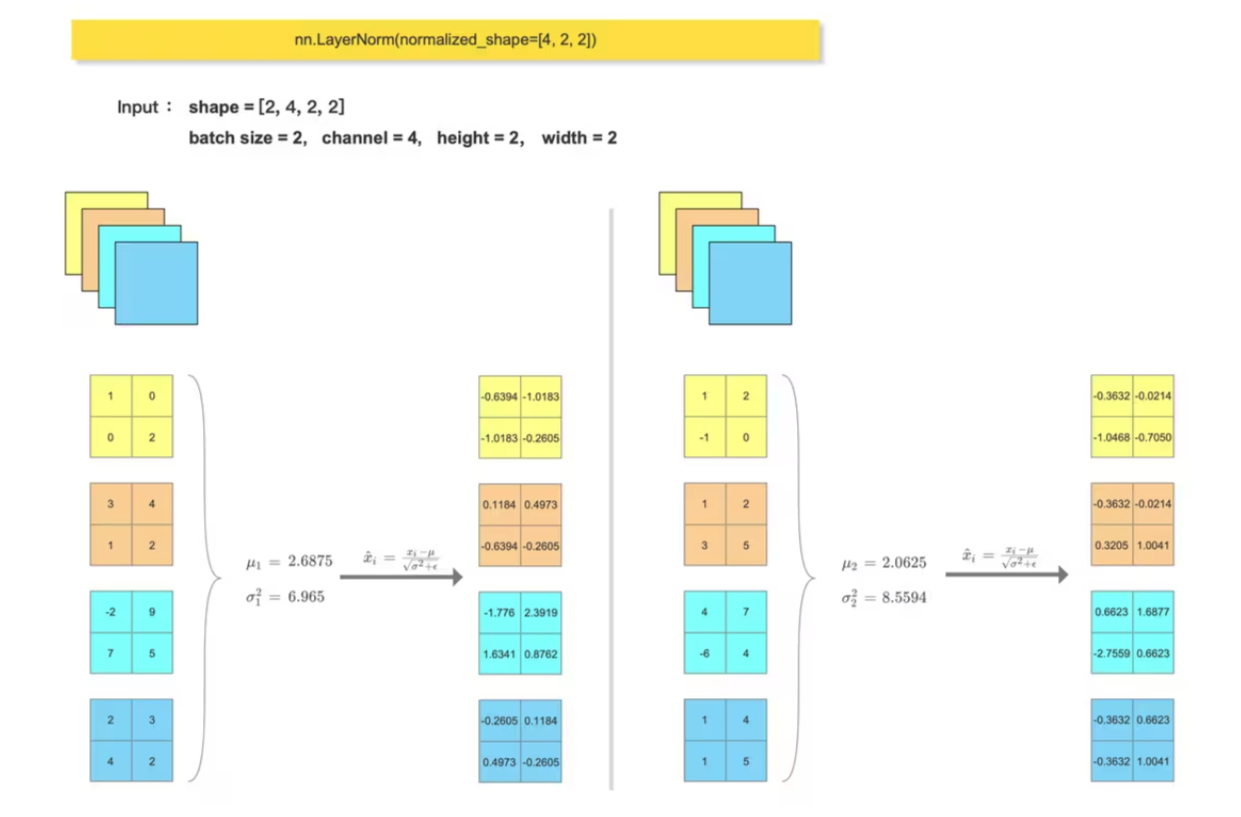
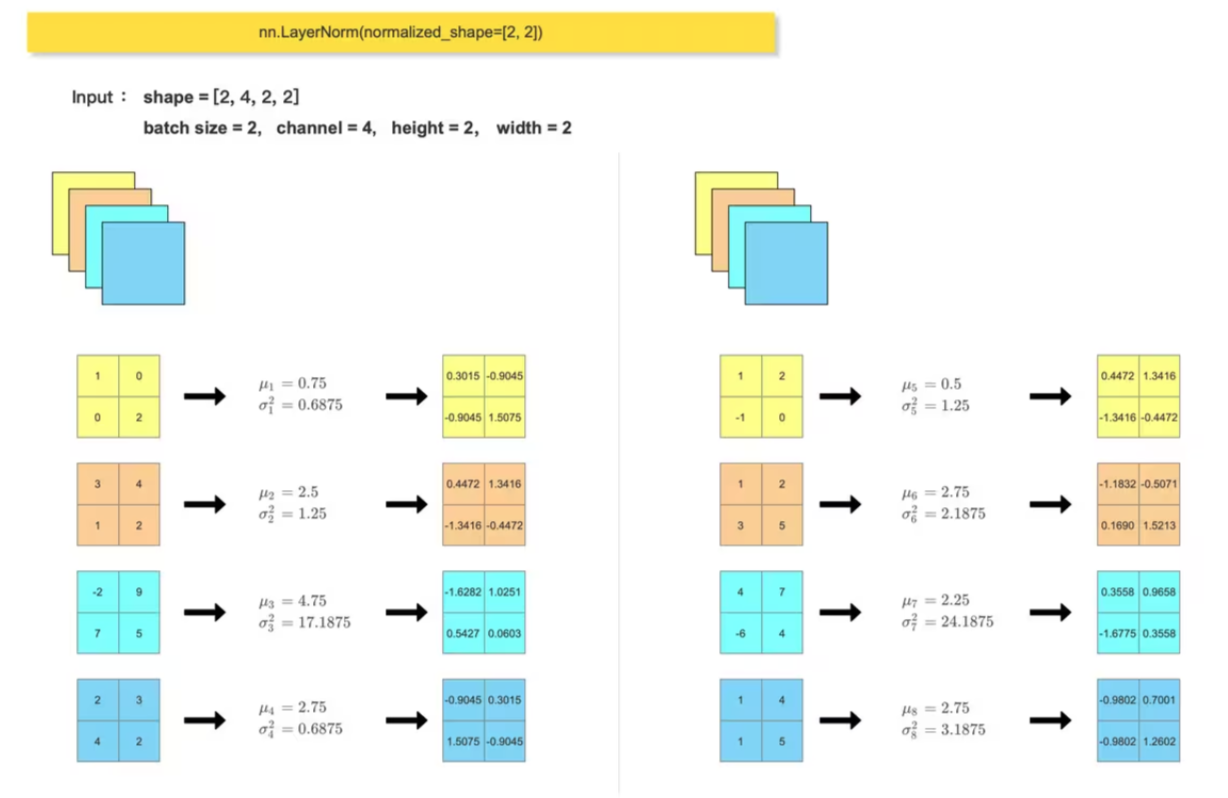
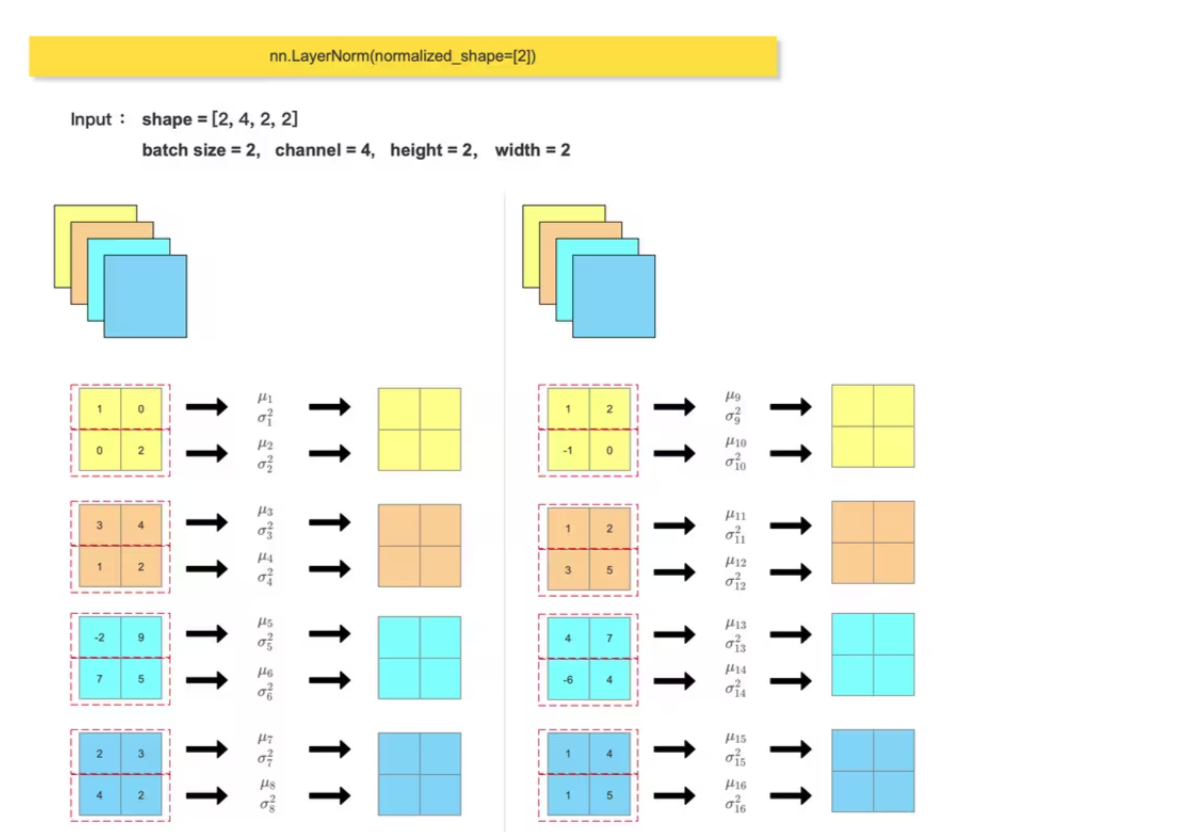
print(feature_array) 2、LayerNorm
Transformer block 中会使用到 LayerNorm , 一般输入尺寸形为 :(batch_size, token_num, dim),会在最后一个维度做 归一化: nn.LayerNorm(dim)
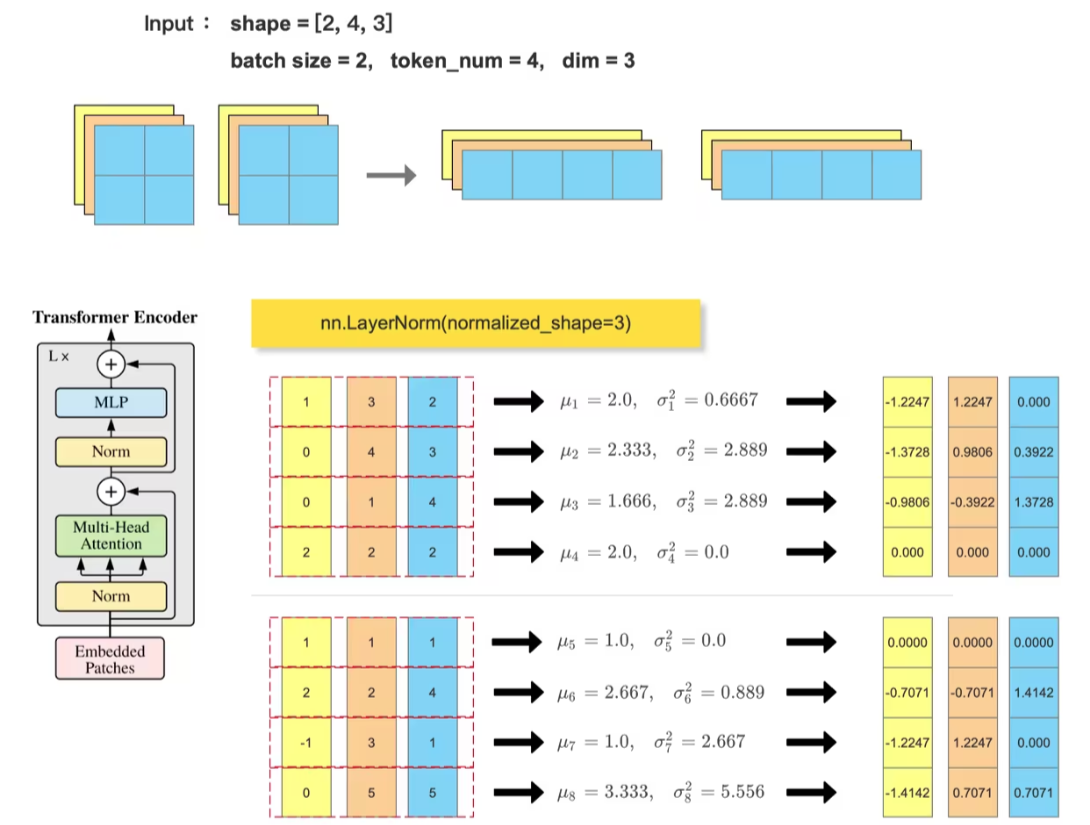
对比手动计算的 LN层输出结果 和 调用 nn.LayerNorm() 的输出结果
import torch
import torch.nn as nn
import numpy as np
feature_array = np.array([[[[1, 0], [0, 2]],
[[3, 4], [1, 2]],
[[2, 3], [4, 2]]],
[[[1, 2], [-1, 0]],
[[1, 2], [3, 5]],
[[1, 4], [1, 5]]]], dtype=np.float32)
feature_array = feature_array.reshape((2, 3, -1)).transpose(0, 2, 1)
feature_tensor = torch.tensor(feature_array.copy(), dtype=torch.float32)
ln_out = nn.LayerNorm(normalized_shape=3)(feature_tensor)
print(ln_out)
b, token_num, dim = feature_array.shape
feature_array = feature_array.reshape((-1, dim))
for i in range(b*token_num):
mean = feature_array[i, :].mean()
var = feature_array[i, :].var()
print(mean)
print(var)
feature_array[i, :] = (feature_array[i, :] - mean) / np.sqrt(var + 1e-5)
print(feature_array.reshape(b, token_num, dim))3、GroupNorm
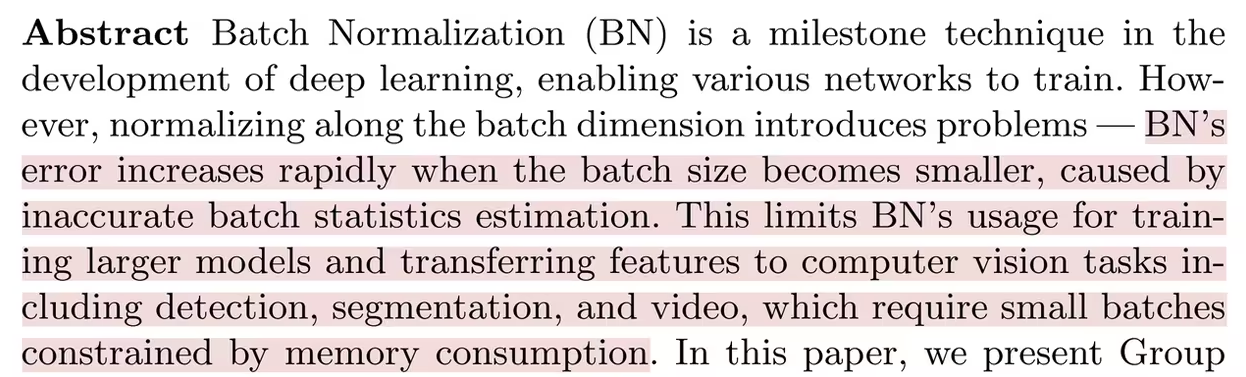
batch size 过大或过小都不适合使用 BN,而是使用 GN。
(1)当 batch size 过大时,BN 会将所有数据归一化到相同的均值和方差。这可能会导致模型在训练时变得非常不稳定,并且很难收敛。
(2)当 batch size 过小时,BN 可能无法有效地学习数据的统计信息。
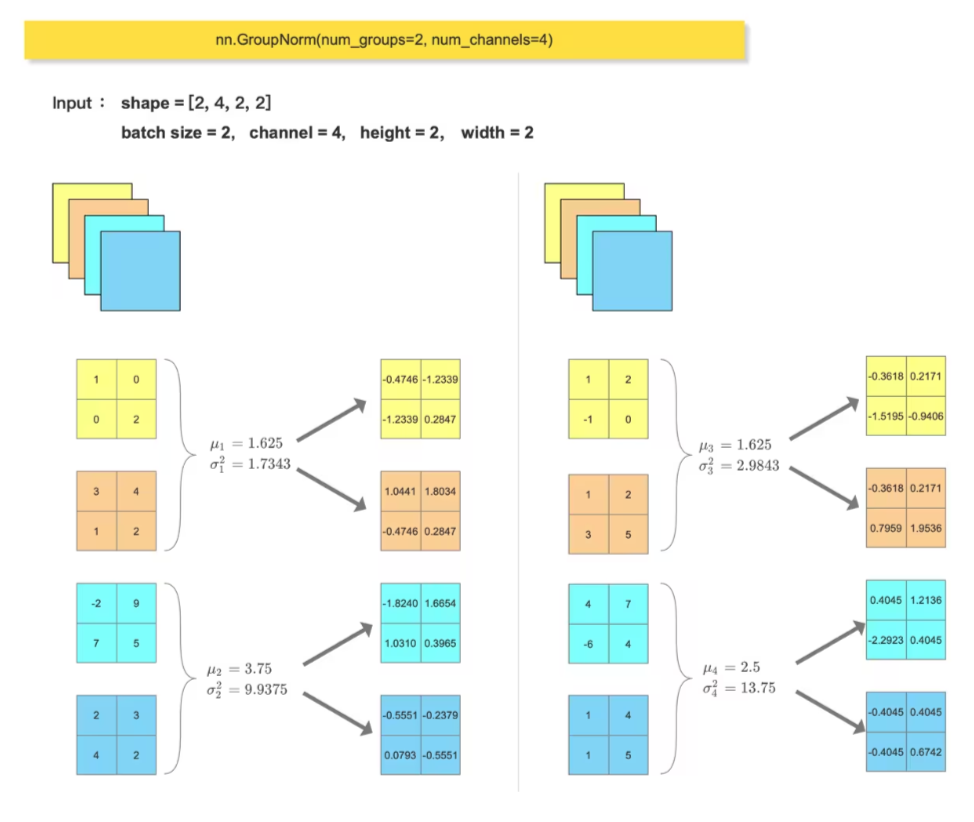
对比手动计算的 GN层输出结果 和 调用 nn.GroupNorm() 的输出结果
import torch
import torch.nn as nn
import numpy as np
feature_array = np.array([[[[1, 0], [0, 2]],
[[3, 4], [1, 2]],
[[-2, 9], [7, 5]],
[[2, 3], [4, 2]]],
[[[1, 2], [-1, 0]],
[[1, 2], [3, 5]],
[[4, 7], [-6, 4]],
[[1, 4], [1, 5]]]], dtype=np.float32)
feature_tensor = torch.tensor(feature_array.copy(), dtype=torch.float32)
gn_out = nn.GroupNorm(num_groups=2, num_channels=4)(feature_tensor)
print(gn_out)
feature_array = feature_array.reshape((2, 2, 2, 2, 2)).reshape((4, 2, 2, 2))
for i in range(feature_array.shape[0]):
channel = feature_array[i, :, :, :]
mean = feature_array[i, :, :, :].mean()
var = feature_array[i, :, :, :].var()
print(mean)
print(var)
feature_array[i, :, :, :] = (feature_array[i, :, :, :] - mean) / np.sqrt(var + 1e-5)
feature_array = feature_array.reshape((2, 2, 2, 2, 2)).reshape((2, 4, 2, 2))
print(feature_array)附
nn.LayerNorm 参数 num_features 的使用