1.简介
这篇文章介绍了一种名为MeanFlow的新型生成模型框架,旨在通过单步生成过程高效地将先验分布转换为数据分布。文章的核心创新在于引入了平均速度的概念,这一概念的引入使得模型能够通过单次函数评估完成从先验分布到数据分布的转换,显著提高了生成效率。
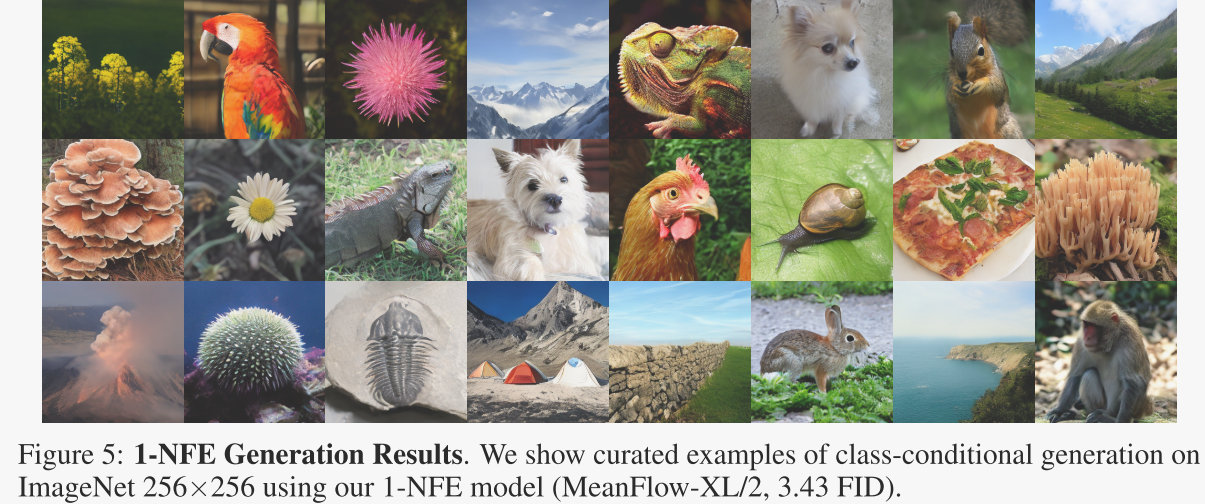
文章通过一系列实验验证了MeanFlow模型的性能,展示了其在单步生成任务中的强大能力,特别是在ImageNet 256×256数据集上的表现,显著优于以往的单步扩散/流模型。此外,文章还探讨了MeanFlow模型在分类器自由引导(CFG)方面的应用,通过自然地整合CFG,进一步提升了生成质量,同时保持了单步生成的高效性。这些创新不仅为生成模型的研究提供了新的视角,也为实际应用中的高效数据生成提供了有力的支持。
效果图
论文地址:https://arxiv.org/pdf/2505.13447
-
-
2.论文详解
Flow Matching
Flow Matching是一类生成模型,旨在学习匹配两个概率分布之间的流,这些流由速度场表示。具体来说:
- 给定数据
和先验
,可以构造一个随时间 t 变化的流路径
,其中
和
是预先定义的时间表。
- 速度
定义为
,其中 ' 表示时间导数。这种速度在作者的研究中被称为条件速度,记作
。通常使用的时间表是
和
,带入上式后
。
这里的 ϵ 通常表示噪声。在生成模型的上下文中,噪声 ϵ 是一个随机变量,用于引入随机性,从而生成多样化的样本。具体来说,ϵ 通常是从某个预定义的概率分布(如标准正态分布)中采样得到的,这个分布被称为先验分布
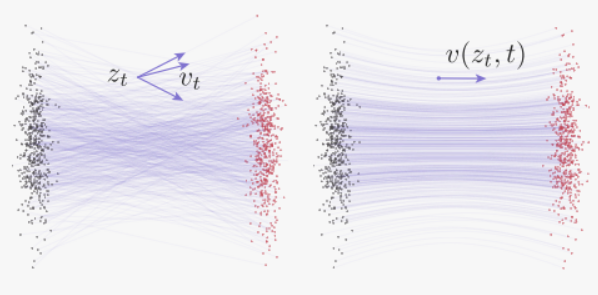
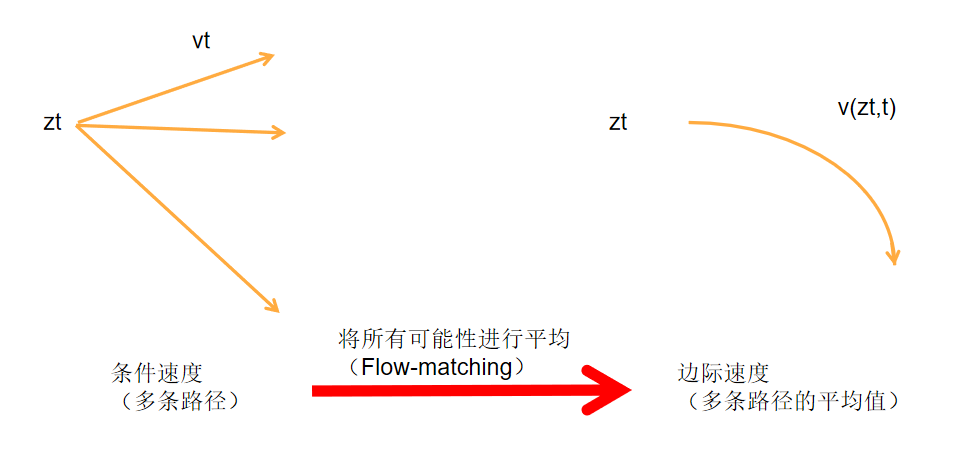
左图(Conditional flows):展示了条件流。给定一个中间状态 zt,它可以由不同的原始数据 x 和噪声 ϵ 对产生,这导致不同的条件速度 vt。图中用不同颜色的箭头表示不同的速度向量。
右图(Marginal flows):展示了边际流,这是通过对所有可能的条件速度进行边缘化(即对所有可能的 x 和 ϵ 进行平均)得到的。边际速度场作为网络训练的基础真实场。图中展示了这个速度场,它是由所有条件流的平均速度构成的。
这张图实际上在说明这样一件事:
- 左图表示所有
和x的匹配结果(多个流匹配路径),可见同一个
- 而右图表示的是:Flow Matching本质上建模的是所有可能性的期望(也就是将所有可能的条件速度
。而流匹配其实是多个流匹配路径的平均值。
-
接下来作者使用一个由参数 参数化的神经网络
来拟合边际速度场,其损失函数定义为
。尽管由于上式中的边际化操作,直接计算这个损失函数是不可行的,但作者提出可以转而评估条件Flow Matching损失:
,其中目标
是条件速度。最小化
等价于最小化
。详细解释如下:
LFM(θ) 是通过计算神经网络预测的速度场 vθ(zt,t) 与真实的边际速度场 v(zt,t) 之间的差异来定义的。
LCFM(θ) 是通过计算神经网络预测的速度场 vθ(zt,t) 与给定条件下的真实速度场 vt(zt∣x) 之间的差异来定义的。
由于边际速度场是所有条件速度的平均值,最小化 LCFM 实际上是在最小化所有条件速度的平均误差。这意味着,如果我们能够准确地拟合每个条件下的速度场,那么边际速度场也会被准确地拟合。
给定一个边际速度场,可以通过解
的常微分方程(ODE)来生成样本:
从
开始。这个解可以写成:
,其中作者用 r 表示另一个时间步。在实践中,这个积分是在离散的时间步上通过数值方法来近似的。例如欧拉方法(一种一阶ODE求解器),也可以应用更高阶的求解器。
值得注意的是,尽管每个单独的条件流(条件速度)可能是直线,但因为边际速度是多个速度的平均值,即当考虑所有可能的条件流时,平均下来后的整体轨迹可能会变得弯曲。
-
MeanFlow模型
(本章数学公式过于硬核,请做好准备)
作者的方法的核心思想是引入一个新的场来表示平均速度,而在Flow Matching中建模的速度表示瞬时速度。
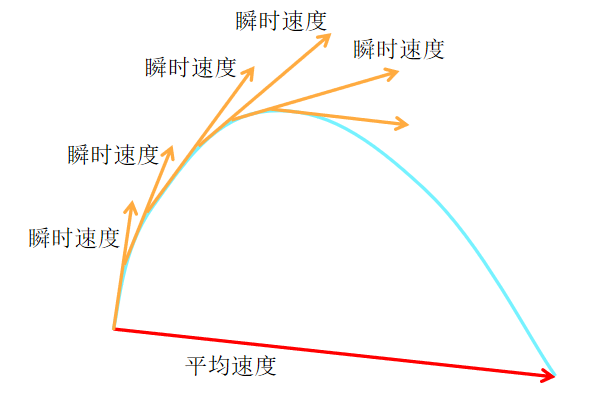
平均速度:作者将平均速度定义为两个时间步长 t 和 r 之间的位移(通过积分获得)除以时间间隔。形式上,平均速度 u 定义为:
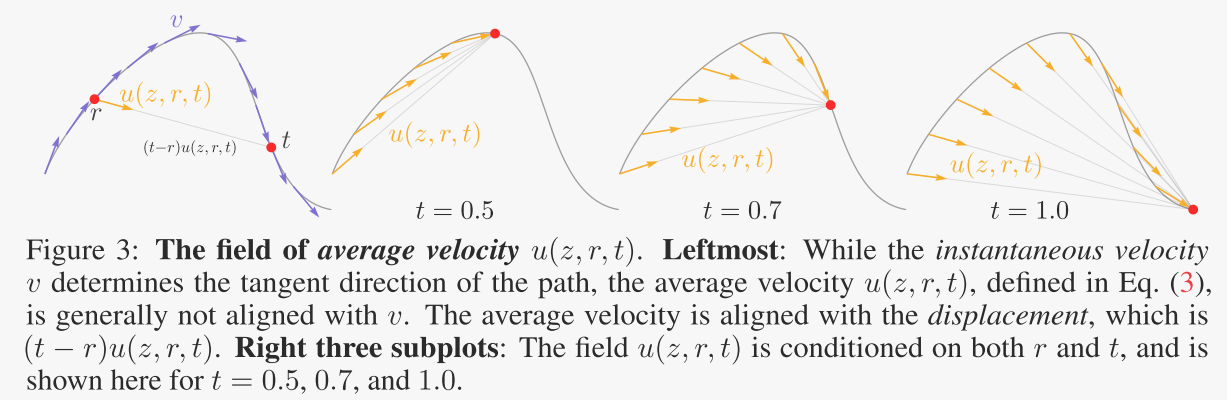
瞬时速度 v:决定了路径的切线方向,即数据点在某一时刻的瞬时运动方向。
平均速度 u(z,r,t):与位移对齐,反映了数据点在一段时间内的平均运动趋势,通常与瞬时速度不一致。
位移:定义为 (t−r)u(z,r,t),表示数据点在一段时间内的平均位移。
为了强调概念上的区别,作者在整篇论文中使用符号 u 来表示平均速度,使用 v 来表示瞬时速度。 是一个同时依赖于 (r, t) 的场。 u 的场在图3中进行了说明。需要注意的是,通常情况下,平均速度 u 是瞬时速度 v 的一个泛函的结果:即
。平均速度 u 是由瞬时速度 v 诱导的场,不依赖于任何神经网络。这意味着 u 是一个客观存在的场,与模型的实现无关。
作者的MeanFlow模型的最终目标是使用神经网络 来近似平均速度。这有一个显著的优势,即假设我们能够准确近似这个量,我们可以通过
的单次评估来近似整个流路径。换句话说,这种方法更适合单步或少步生成。
然而,直接使用定义的平均速度作为训练网络的真实值是不可行的,因为这需要在训练期间评估一个积分。作者的关键洞见是,平均速度的定义方程可以被操作以构建一个最终适合训练的优化目标,即使只有瞬时速度是可访问的。
MeanFlow恒等式
为了得到一个适合训练的公式,作者将方程重写为:
现在作者对两边关于 t 求导,将 r 视为与 t 独立的变量。这导致:
其中左边的操作使用了乘积法则,而右边使用了微积分的基本定理。重新排列项,作者得到了恒等式:
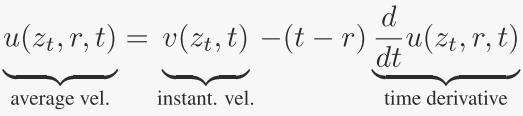
作者将这个方程称为“MeanFlow恒等式”,它描述了 v 和 u 之间的关系。方程的右边为 提供了一个“目标”形式,作者将利用它来构建一个损失函数以训练神经网络。为了作为一个合适的目标,我们还必须进一步分解时间导数项,作者接下来将讨论这一点。
计算时间导数
为了计算方程中的 项,注意
表示一个全导数,它可以在偏导数的条件下展开:
由于,
,和
,作者得到了 u 和 v 之间的另一个关系:
这个方程表明,总导数是由函数 u 的雅可比矩阵 和切向量
之间的雅可比向量积(JVP)给出的。在现代库中,这可以通过 jvp 接口高效计算,例如 PyTorch 中的 torch.func.jvp 或 JAX 中的 jax.jvp。
使用平均速度进行训练
到目前为止,公式不依赖于任何网络参数化。现在作者引入一个模型来学习 u。形式上,作者参数化一个网络 并鼓励它满足MeanFlow恒等式。具体来说,作者最小化以下目标:
,其中
该目标使用瞬时速度 v 作为唯一的真实信号;不需要积分计算。虽然目标应该涉及 u 的导数(即 ),但它们被其参数化对应物(即
)替换。在损失函数中,应用了停止梯度(sg)操作到目标
。
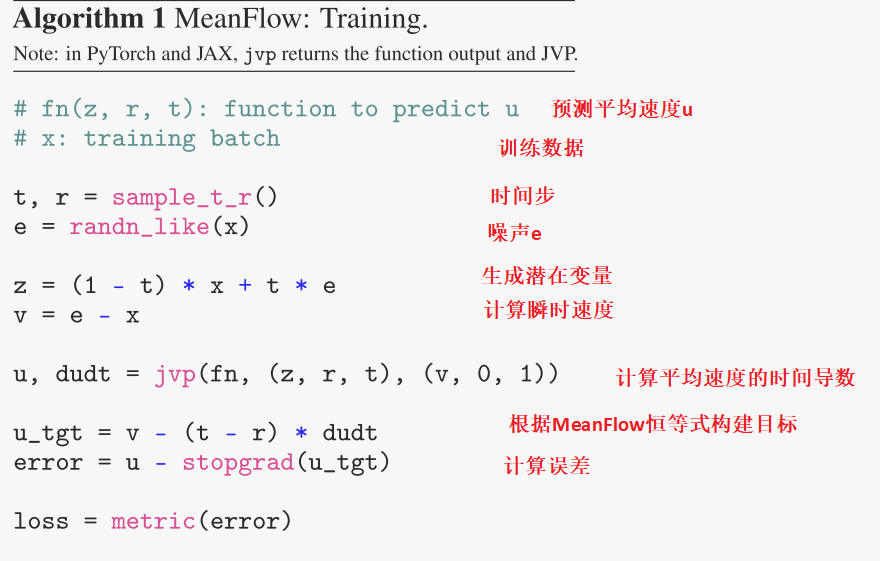
这个算法1实际上是:使用模型预测u,而真实值u_tgt不好算,然后进行了一系列的转换,转换为v和dudt的表达式,然后计算得到u_tgt,然后利用预测值u和真实值u_tgt计算损失。
相应的,推理过程如下:

-
有CFG的MeanFlow
作者的方法自然支持无分类器引导(CFG)。
真实场
作者构建了一个新的真实场 :
(13)
这是一个类别条件场和类别无条件场的线性组合:
其中 是条件速度(更准确地说,是样本条件速度)。遵循MeanFlow的精神,作者引入了与
对应的平均速度
。根据MeanFlow恒等式,
满足:
(15)
再次, 和
是不依赖于神经网络的底层真实场。这里,如方程(13)中定义的
,可以重写为:
(16)
其中作者利用了关系:,以及
。
使用引导进行训练
通过方程(15)和方程(16),作者构建了一个网络及其学习目标。作者直接通过函数 参数化
。
基于方程(15),作者得到目标:(17),其中
这个公式类似于方程(9),唯一的区别是它有一个修改后的 :
(19)
这是由方程(16)驱动的:方程(16)中的 项,即边际速度,被(样本条件)速度
替换,如果
,这个损失函数退化为方程(9)中的无CFG情况。
为了使方程(17)中的网络 暴露于类别无条件输入,作者以10%的概率丢弃类别条件。出于类似的动机,作者也可以在方程(19)中将
暴露于类别无条件和类别条件版本。
带有CFG的单步NFE采样
在作者的公式中, 直接模拟
,这是由CFG速度
(方程(13))引起的平均速度。因此,在采样过程中不需要线性组合:作者直接使用
进行单步采样(见算法2),仅需要一次NFE。这种公式保留了理想的单步NFE行为。
-
其他
损失
作者考虑损失函数的形式为 ,其中
表示回归误差。可以证明,最小化
等价于最小化平方L2损失
并使用“自适应损失权重”。详细信息见附录。在实践中,作者设置权重为
,其中
且 c > 0(例如,
)。自适应加权损失是
,其中
。如果 p = 0.5,这类似于Pseudo-Huber损失。
采样时间步 (r, t)
作者从预定分布中采样两个时间步 (r, t)。作者研究了两种类型的分布:(i)均匀分布,,和(ii)对数正态(lognorm)分布,其中样本首先从正态分布
中抽取,然后使用逻辑函数映射到 (0, 1)。给定一个采样对,作者将较大的值分配给 t,较小的值分配给 r。作者设置一定比例的随机样本,使得 r = t。
在 (r, t) 上的条件化
作者使用位置嵌入来编码时间变量,然后将它们组合并提供给神经网络作为条件。作者注意到,尽管场由 参数化,但网络不必直接条件化 (r, t)。例如,作者可以让网络直接条件化
,其中
。在这种情况下,作者有
,其中 net 是网络。JVP计算总是相对于函数
。作者在实验中比较不同的条件形式。
-
实验
表1展示了作者在ImageNet 256×256数据集上进行的消融研究结果,主要关注单步生成(1-NFE)的性能,使用Fréchet Inception Distance(FID)作为评估指标。表1中的消融研究验证了MeanFlow模型中各个组件的有效性,并展示了如何通过调整不同的参数来优化模型性能。
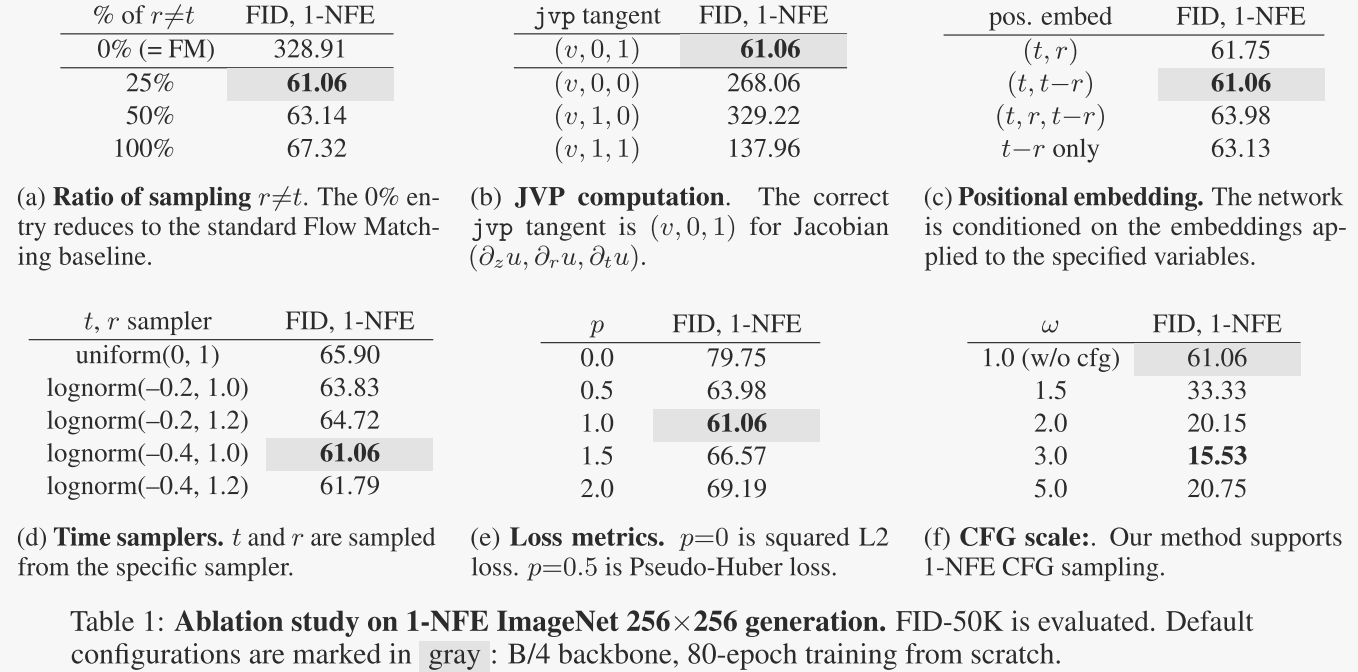
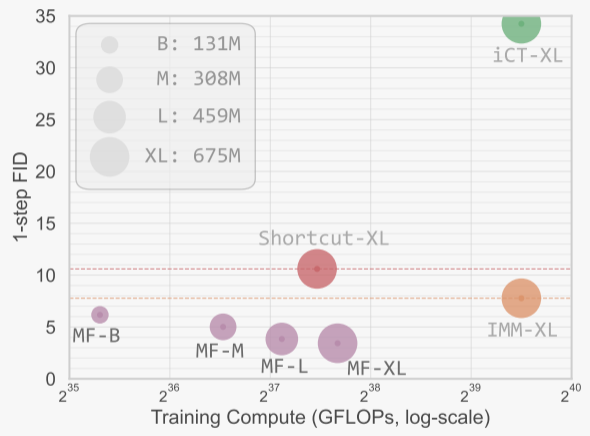
图4展示了MeanFlow模型在ImageNet 256×256数据集上的可扩展性研究结果。具体来说,图中展示了不同模型大小(从B/2到XL/2)和不同训练周期下,使用1-NFE(单步函数评估)生成的Fréchet Inception Distance(FID)分数。
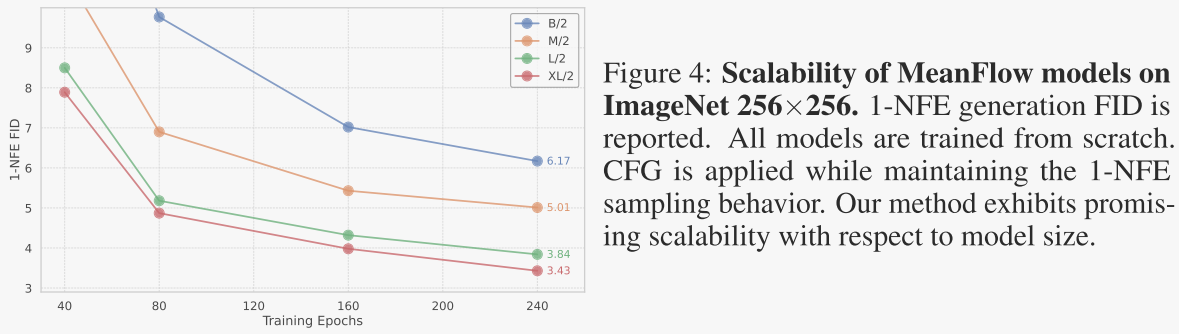
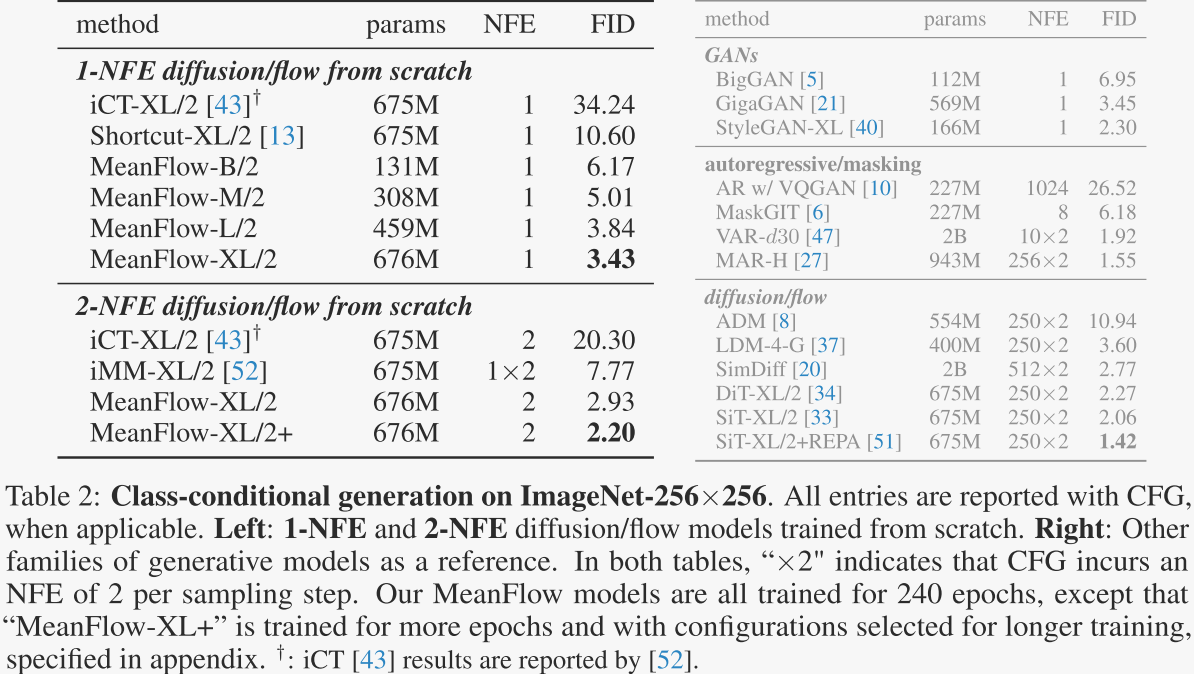
表2比较了在ImageNet 256×256数据集上不同生成模型的性能,主要使用Fréchet Inception Distance(FID)作为评估指标。 表2展示了MeanFlow模型在单步和少步生成任务中的竞争力,特别是在1-NFE生成上取得了最先进的性能。
3.代码详解
train.py
这段代码实现了一个训练循环,主要功能如下:
- 使用 `tqdm` 显示训练进度条;
- 从数据加载器中获取图像和类别标签,送入指定设备(如GPU);
- 前向传播计算损失(重要),进行反向传播和优化;
- 每隔一定步骤记录损失值、学习率等到日志文件;
- 每隔一定步骤生成样本图像并保存。
这段代码我们不多介绍
with tqdm(range(n_steps), dynamic_ncols=True) as pbar:
pbar.set_description("Training")
model.train()
for step in pbar:
data = next(train_dataloader)
x = data[0].to(accelerator.device) # 图像 [b,c,h,w]=[48,1,32,32](mnist)
c = data[1].to(accelerator.device) # 类别 b
loss, mse_val = meanflow.loss(model, x, c) # 计算损失
accelerator.backward(loss) # 反向传播
optimizer.step() # 更新参数
optimizer.zero_grad() # 梯度清零
global_step += 1 # 记录训练状态
losses += loss.item()
mse_losses += mse_val.item()
if accelerator.is_main_process:
if global_step % log_step == 0: # 每隔一定步骤(log_step)在主进程中记录训练日志信息到文件。
current_time = time.asctime(time.localtime(time.time()))
batch_info = f'Global Step: {global_step}'
loss_info = f'Loss: {losses / log_step:.6f} MSE_Loss: {mse_losses / log_step:.6f}'
# Extract the learning rate from the optimizer
lr = optimizer.param_groups[0]['lr']
lr_info = f'Learning Rate: {lr:.6f}'
log_message = f'{current_time}\n{batch_info} {loss_info} {lr_info}\n'
with open('log.txt', mode='a') as n:
n.write(log_message)
losses = 0.0
mse_losses = 0.0
if global_step % sample_step == 0:
if accelerator.is_main_process:
model_module = model.module if hasattr(model, 'module') else model
z = meanflow.sample_each_class(model_module, 1)
log_img = make_grid(z, nrow=10)
img_save_path = f"images/step_{global_step}.png"
save_image(log_img, img_save_path)
accelerator.wait_for_everyone()
model.train()其中最重要的部分是loss, mse_val = meanflow.loss(model, x, c),我们接下来进行介绍
-
meanflow.py
代码的核心部分位于meanflow.py下
MeanFlow.loss()函数实现了一个基于扩散模型的训练损失计算,主要包括以下步骤:
- 时间采样:生成时间对 `(t, r)` 用于控制扩散过程;
- 噪声与归一化:加入随机噪声 `e` 并对输入 `x` 归一化;
- 插值与速度构造:构建中间状态 `z` 和目标方向 `v`;
- CFG增强:使用无条件模型输出进行分类器无关引导(Classifier-Free Guidance);
- JVP计算:通过雅可比向量积计算模型输出及其时间导数;
- 目标构建与误差计算:构建目标 `u_tgt` 并计算误差;
- 损失计算:使用自适应 L2 损失函数 [adaptive_l2_loss]
class MeanFlow:
def __init__():
...
self.normer = Normalizer.from_list(normalizer)
if jvp_api == 'funtorch':
self.jvp_fn = torch.func.jvp
self.create_graph = False
elif jvp_api == 'autograd':
self.jvp_fn = torch.autograd.functional.jvp
self.create_graph = True
def loss(self, model, x, c=None):
batch_size = x.shape[0]
device = x.device
t, r = self.sample_t_r(batch_size, device) # 该函数用于生成时间对 (t, r),其中 t 表示较大的时间值,r 表示较小的时间值,并以一定比例让 r 等于 t。
t_ = rearrange(t, "b -> b 1 1 1") # [b,1,1,1]
r_ = rearrange(r, "b -> b 1 1 1")
e = torch.randn_like(x) # 生成噪声 e [b,c,h,w]=[48,1,32,32]
x = self.normer.norm(x) # 对输入 x 进行归一化
z = (1 - t_) * x + t_ * e # 插值变量 z [b,c,h,w]=[48,1,32,32]
v = e - x # 条件速度v_t [b,c,h,w]=[48,1,32,32]
if self.w is not None: # 使用无条件分支进行 CFG(Classifier-Free Guidance)增强
uncond = torch.ones_like(c) * self.num_classes # [b],内部全是10
with torch.no_grad():
u_t = model(z, t, t, uncond)
v_hat = self.w * v + (1 - self.w) * u_t # 构造 v_hat 作为目标方向。
else:
v_hat = v
# 以一定概率self.cfg_ratio将输入c中的元素替换为无条件输入uncond
cfg_mask = torch.rand_like(c.float()) < self.cfg_ratio
c = torch.where(cfg_mask, uncond, c)
if self.cfg_uncond == 'v':
# as v = wv - (1-w)v = wv - (1-w)u in the unconditional case, should we directly use v instead?
cfg_mask = rearrange(r, "b -> b 1 1 1").bool()
v_hat = torch.where(cfg_mask, v, v_hat)
# forward pass
# u = model(z, t, r, y=c)
model_partial = partial(model, y=c) # model_partial 是固定了部分参数(y=c)后的模型函数
jvp_args = ( # 雅可比矩阵向量积(JVP)的参数元组 jvp_args
lambda z, t, r: model_partial(z, t, r),
(z, t, r),
(v_hat, torch.ones_like(t), torch.zeros_like(r)),
)
if self.create_graph:
u, dudt = self.jvp_fn(*jvp_args, create_graph=True) # 调用jvp_fn得到输出u和其时间导数dudt
else:
u, dudt = self.jvp_fn(*jvp_args)
u_tgt = v_hat - (t_ - r_) * dudt # 目标值u_tgt
error = u - stopgrad(u_tgt) # 计算当前输出 u 与目标输出 u_tgt 的误差
loss = adaptive_l2_loss(error) # 对误差使用自适应 L2 损失函数计算最终损失。
# loss = F.mse_loss(u, stopgrad(u_tgt))
mse_val = (stopgrad(error) ** 2).mean()
return loss, mse_val其中sample_t_r()如下,用于生成满足特定分布的时间对 (t, r),其中 t >= r。
- 根据设定的分布类型(uniform 或 lognorm)生成两列随机数;
- 将每行较大的值作为 t,较小的作为 r;
- 按照一定比例(flow_ratio)将部分样本的 r 设为等于 t;
def sample_t_r(self, batch_size, device):
if self.time_dist[0] == 'uniform': # 根据分布类型(uniform)生成两列随机数
samples = np.random.rand(batch_size, 2).astype(np.float32)
elif self.time_dist[0] == 'lognorm': # 根据分布类型(lognorm)生成两列随机数
mu, sigma = self.time_dist[-2], self.time_dist[-1]
normal_samples = np.random.randn(batch_size, 2).astype(np.float32) * sigma + mu # [b,2]
samples = 1 / (1 + np.exp(-normal_samples)) # 应用 sigmoid
# 每行的两个数中较大者为 t,较小者为 r Assign t = max, r = min, for each pair
t_np = np.maximum(samples[:, 0], samples[:, 1]) #
r_np = np.minimum(samples[:, 0], samples[:, 1])
# 按照 flow_ratio 概率随机选取部分样本,使这些样本的 r = t;
num_selected = int(self.flow_ratio * batch_size)
indices = np.random.permutation(batch_size)[:num_selected]
r_np[indices] = t_np[indices]
t = torch.tensor(t_np, device=device)
r = torch.tensor(r_np, device=device)
return t, r其中对输入 `x` 归一化是使用Normalizer.norm()
class Normalizer:
def __init__(self, mode='minmax', mean=None, std=None):
...
self.mode = mode
if mode == 'mean_std':
if mean is None or std is None:
raise ValueError("mean and std must be provided for 'mean_std' mode")
self.mean = torch.tensor(mean).view(-1, 1, 1)
self.std = torch.tensor(std).view(-1, 1, 1)
def norm(self, x):
if self.mode == 'minmax':
return x * 2 - 1
elif self.mode == 'mean_std':
return (x - self.mean.to(x.device)) / self.std.to(x.device)其中loss如下:
传统的 L2 损失(MSE)对于大误差非常敏感,容易被 outliers 影响。而这个损失函数通过引入一个基于误差大小的动态权重来降低大误差的影响,从而达到以下效果:
- 对小误差保持近似 L2 特性(平滑、易优化)
- 对大误差自动降低权重,防止其主导训练过程
,其中
stopgrad() 是为了防止权重
w在反向传播中影响梯度计算。换句话说,w是根据当前误差计算出来的,但它本身不参与梯度更新,只是作为加权系数使用。这样可以保证训练稳定性。
def adaptive_l2_loss(error, gamma=0.5, c=1e-3):
"""
Adaptive L2 loss: sg(w) * ||Δ||_2^2, where w = 1 / (||Δ||^2 + c)^p, p = 1 - γ
Args:
error: Tensor of shape (B, C, W, H)
gamma: Power used in original ||Δ||^{2γ} loss
c: Small constant for stability
Returns:
Scalar loss
"""
delta_sq = torch.mean(error ** 2, dim=(1, 2, 3), keepdim=False) # 计算每个样本的均方误差[b]
p = 1.0 - gamma # p = 1 - γ
w = 1.0 / (delta_sq + c).pow(p) # w = 1 / (||Δ||^2 + c)^p, p = 1 - γ
loss = delta_sq # ||Δ||^2
return (stopgrad(w) * loss).mean() # 使用 stopgrad(w) 阻止权重梯度传播 sg(w) * ||Δ||_2^2该函数用于在给定模型和类别条件下,为每个类别生成指定数量的图像样本。
class MeanFlow:
@torch.no_grad() # 禁用梯度计算
def sample_each_class(self, model, n_per_class,
sample_steps=1, device='cuda'):
model.eval()
c = torch.arange(self.num_classes, device=device).repeat(n_per_class) # [c] 创建类别标签张量,每个类重复n_per_class次
z = torch.randn(self.num_classes * n_per_class, self.channels,
self.image_size, self.image_size, device=device) # 初始化随机噪声图像。[c,channel,h,w]=[10,1,32,32]
t = torch.ones((c.shape[0],), device=c.device) # 定义固定的时间步t和参考步r
r = torch.zeros((c.shape[0],), device=c.device)
z = z - model(z, t, r, c) # 使用模型对噪声进行一次去噪操作 [c,channel,h,w]=[10,1,32,32]
z = self.normer.unnorm(z.clip(-1, 1)) # 将图像从归一化空间还原到原始像素空间。 [c,channel,h,w]=[10,1,32,32]
return z其中unnorm()如下:用于将图像从归一化空间还原到原始像素空间。
class Normalizer:
def unnorm(self, x):
if self.mode == 'minmax':
return (x + 1) * 0.5
elif self.mode == 'mean_std':
return x * self.std.to(x.device) + self.mean.to(x.device)-
模型架构
模型架构就是基本的dit架构,即是一个条件扩散模型的时间感知 Transformer 主干网络(Conditional Diffusion Transformer),其主要作用是:在给定噪声图像 x、扩散时间步 t、参考信息 r 和可选类别标签 y 的情况下,预测去噪后的图像残差。
class MFDiT(nn.Module):
def __init__():
...
self.x_embedder = PatchEmbed(input_size, patch_size, in_channels, dim)
self.t_embedder = TimestepEmbedder(dim)
self.r_embedder = TimestepEmbedder(dim)
self.y_embedder = LabelEmbedder(num_classes, dim) if self.use_cond else None
self.pos_embed = nn.Parameter(torch.zeros(1, num_patches, dim), requires_grad=True)
self.blocks = nn.ModuleList([
DiTBlock(dim, num_heads, mlp_ratio) for _ in range(depth)
])
self.final_layer = FinalLayer(dim, patch_size, self.out_channels)
self.initialize_weights()
def initialize_weights(self):
# Initialize transformer layers:
def _basic_init(module):
if isinstance(module, nn.Linear):
torch.nn.init.xavier_uniform_(module.weight)
if module.bias is not None:
nn.init.constant_(module.bias, 0)
self.apply(_basic_init)
# Initialize (and freeze) pos_embed by sin-cos embedding:
pos_embed = get_2d_sincos_pos_embed(self.pos_embed.shape[-1], int(self.x_embedder.num_patches ** 0.5))
self.pos_embed.data.copy_(torch.from_numpy(pos_embed).float().unsqueeze(0))
# Initialize patch_embed like nn.Linear (instead of nn.Conv2d):
w = self.x_embedder.proj.weight.data
nn.init.xavier_uniform_(w.view([w.shape[0], -1]))
nn.init.constant_(self.x_embedder.proj.bias, 0)
# Initialize label embedding table:
if self.y_embedder is not None:
nn.init.normal_(self.y_embedder.embedding.weight, std=0.02)
# Initialize timestep embedding MLP:
nn.init.normal_(self.t_embedder.mlp[0].weight, std=0.02)
nn.init.normal_(self.t_embedder.mlp[2].weight, std=0.02)
# Zero-out adaLN modulation layers in DiT blocks:
for block in self.blocks:
nn.init.constant_(block.adaLN_modulation[-1].weight, 0)
nn.init.constant_(block.adaLN_modulation[-1].bias, 0)
# Zero-out output layers:
nn.init.constant_(self.final_layer.adaLN_modulation[-1].weight, 0)
nn.init.constant_(self.final_layer.adaLN_modulation[-1].bias, 0)
nn.init.constant_(self.final_layer.linear.weight, 0)
nn.init.constant_(self.final_layer.linear.bias, 0)
def unpatchify(self, x):
"""
x: (N, T, patch_size**2 * C)
imgs: (N, H, W, C)
"""
c = self.out_channels
p = self.x_embedder.patch_size[0] # 2
h = w = int(x.shape[1] ** 0.5) # 16
assert h * w == x.shape[1]
x = x.reshape(shape=(x.shape[0], h, w, p, p, c)) # [b,16,16,2,2,1]
x = torch.einsum('nhwpqc->nchpwq', x)
imgs = x.reshape(shape=(x.shape[0], c, h * p, h * p)) # [b,1,32,32]
return imgs
def forward(self, x, t, r, y=None):
"""
Forward pass of DiT.
x: (N, C, H, W) tensor of spatial inputs (images or latent representations of images)
t: (N,) tensor of diffusion timesteps
y: (N,) tensor of class labels
"""
H, W = x.shape[-2:]
x = self.x_embedder(x) + self.pos_embed # 将输入图像 x 通过 x_embedder 转换为嵌入表示,并加上位置编码 [b,t,d]=[48,256,384] (N, T, D), where T = H * W / patch_size ** 2
t = self.t_embedder(t) # (N, D)=[48,384]
r = self.r_embedder(r)
# t = torch.cat([t, r], dim=-1)
t = t + r # 时间与参考嵌入:分别对 t 和 r 进行嵌入后相加
# condition 得到条件向量 c
c = t
if self.use_cond: # 类别条件融合
y = self.y_embedder(y) # (N, D)
c = c + y # (N, D)
for i, block in enumerate(self.blocks):
x = block(x, c) # (N, T, D)
x = self.final_layer(x, c) # (N, T, patch_size ** 2 * out_channels)=[48,256,4]
x = self.unpatchify(x) # 还原为图像格式 (N, out_channels, H, W)
return xclass DiTBlock(nn.Module):
def __init__(self, dim, num_heads, mlp_ratio=4.0):
super().__init__()
self.norm1 = RMSNorm(dim)
self.attn = Attention(dim, num_heads=num_heads, qkv_bias=True, qk_norm=True, norm_layer=RMSNorm)
self.attn.fused_attn = False
self.norm2 = RMSNorm(dim)
mlp_dim = int(dim * mlp_ratio)
approx_gelu = lambda: nn.GELU(approximate="tanh")
self.mlp = Mlp(
in_features=dim, hidden_features=mlp_dim, act_layer=approx_gelu, drop=0
)
self.adaLN_modulation = nn.Sequential(nn.SiLU(), nn.Linear(dim, 6 * dim))
def forward(self, x, c):
shift_msa, scale_msa, gate_msa, shift_mlp, scale_mlp, gate_mlp = (
self.adaLN_modulation(c).chunk(6, dim=-1) # [b,d]=[48,384] 通过 adaLN_modulation 从条件输入 c 中生成六个仿射变换参数(平移和缩放)及门控系数
)
x = x + gate_msa.unsqueeze(1) * self.attn( # [b,t,d]=[48,256,384] 进行仿射变换,再通过注意力机制,并乘以门控系数后残差连接
modulate(self.norm1(x), scale_msa, shift_msa)
)
x = x + gate_mlp.unsqueeze(1) * self.mlp( # [b,t,d]=[48,256,384]
modulate(self.norm2(x), scale_mlp, shift_mlp) # 进行仿射变换后通过 MLP,并乘以门控系数后残差连接
)
return x其中
def modulate(x, scale, shift):
return x * (1 + scale.unsqueeze(1)) + shift.unsqueeze(1)-
-
4.总结
这篇文章介绍了MeanFlow,这是一种新型的一步生成模型框架,用于生成建模。与传统的流匹配方法不同,MeanFlow通过引入平均速度的概念来表征流场,而不是使用瞬时速度。平均速度定义为两个时间步长之间的位移与时间间隔的比值,这一定义使得模型能够在单次函数评估中完成从先验分布到数据分布的转换,显著提高了生成效率。文章详细阐述了MeanFlow模型的理论基础,包括平均速度与瞬时速度之间的关系,以及如何通过神经网络训练来近似平均速度场。此外,文章还探讨了如何将分类器自由引导(CFG)整合到MeanFlow模型中,以进一步提升生成样本的质量,同时保持单步生成的高效性。通过在ImageNet 256×256数据集上的实验,作者展示了MeanFlow模型在一步生成任务中的优越性能,其生成的图像质量显著优于现有的一步扩散/流模型。文章的研究表明,MeanFlow模型不仅在理论上具有创新性,而且在实际应用中也展现出了巨大的潜力,为生成模型的研究和应用提供了新的方向。
亲爱的读者朋友们,
在这个信息爆炸的时代,您的每一次点赞、收藏和关注都是对我们最大的支持和鼓励。我们致力于分享最有价值的内容,希望能够在您的日常生活中带来一点点启发和帮助。
👍 点赞 —— 您的点赞是我们前进的动力,它告诉我们,我们的内容是有价值的,是能够触动您的心弦的。
💼 收藏 —— 您的收藏是对我们内容的认可,它意味着这些信息对您来说是有用的,是值得您在未来回顾和参考的。
👀 关注 —— 您的关注是对我们最大的信任,它让我们有机会持续为您提供更多高质量的内容,一起探索更多的可能性。
我们承诺,将继续努力,不断优化和创新,为您带来更多有趣、有深度、有价值的内容。同时,我们也非常期待听到您的声音,无论是建议、反馈还是简单的交流,我们都将视为宝贵的财富。
让我们携手并进,共同成长。再次感谢您的支持,期待在未来的日子里,继续与您同行!