HDFS元数据管理概述
在HDFS(Hadoop Distributed File System)的架构中,元数据管理是保证系统可靠性和性能的核心环节。NameNode作为HDFS的主节点,负责维护整个文件系统的命名空间和文件到数据块的映射关系。这些元数据的高效管理直接决定了集群的稳定性和响应速度。
元数据的组成与存储形式
HDFS的元数据主要由两部分构成:FSImage和EditLog。FSImage是文件系统元数据的完整快照,包含了某一时间点HDFS中所有文件和目录的完整信息,例如文件权限、块列表以及存储位置等。它并非实时更新,而是定期生成,类似于数据库中的检查点。EditLog则记录了自最后一次FSImage生成后所有对文件系统的修改操作,包括文件创建、删除、重命名等事务。这种设计类似于数据库的预写日志(WAL)机制,确保操作的持久性和可恢复性。
值得注意的是,NameNode在运行时会将完整的元数据加载到内存中,这使得客户端请求能够获得毫秒级的响应。但内存中的数据具有易失性,因此需要FSImage和EditLog这两种持久化形式作为备份。这种"内存+磁盘"的双重保障机制,既满足了性能需求,又确保了数据安全。
FSImage的关键特性
FSImage文件采用二进制格式存储,经过高度优化以减小体积。它本质上是一个序列化的命名空间镜像,包含了以下核心信息:
- • 文件系统目录树的完整结构
- • 每个文件对应的数据块列表
- • 文件属性(权限、所有者、副本数等)
- • 数据块到DataNode的映射关系(在较新版本中)
在Hadoop 2.x及之前版本中,FSImage文件通常命名为"fsimage_",其中transactionID表示该镜像包含的最大事务ID。例如,fsimage_000000000000123456表示这个镜像包含了前123456个事务操作的结果。
EditLog的运作机制
EditLog采用追加写入(append-only)的方式记录所有修改操作,这种设计带来三个显著优势:
- 1. 写入性能极高,只需要在文件末尾添加记录
- 2. 保证了操作顺序的严格性
- 3. 崩溃恢复时只需重放日志即可重建状态
每个EditLog条目都包含一个单调递增的事务ID(transaction ID),这使得系统能够准确判断操作的先后顺序。在HDFS实现中,正在使用的EditLog文件通常命名为"edits_inprogress_",而已经关闭的日志文件则命名为"edits_-"。
元数据的持久化策略
NameNode采用多目录策略来存储元数据文件,通过配置dfs.namenode.name.dir可以指定多个FSImage存储路径,dfs.namenode.edits.dir则可以配置多个EditLog存储路径。这种多副本存储机制大幅提高了元数据的可靠性——即使某个存储介质发生故障,系统仍能从其他副本恢复。
在实际写入过程中,NameNode会确保所有副本都成功写入后才返回客户端操作成功的响应。这种同步写入策略虽然会带来一定的性能开销,但保证了数据的一致性。值得注意的是,较新版本的Hadoop支持将EditLog写入到基于Quorum Journal Manager(QJM)的共享存储系统中,这为HDFS高可用(HA)部署提供了基础支持。
元数据恢复流程
当NameNode重启时,会执行严格的元数据恢复过程:
- 1. 加载最新的FSImage到内存,重建基础文件系统状态
- 2. 按事务ID顺序重放所有未被包含在FSImage中的EditLog记录
- 3. 接收来自各DataNode的块报告,重建完整的块映射关系
这个过程解释了为什么EditLog文件不能无限增长——过长的EditLog会导致NameNode启动时间不可接受。例如,一个包含数百万个EditLog条目的系统可能需要数小时才能完成启动。这直接引出了Checkpoint机制的必要性,这也是SecondaryNameNode存在的核心价值所在。
EditLog与FsImage的持久化设计
在HDFS的架构设计中,EditLog与FsImage作为元数据管理的核心组件,共同构成了保证数据一致性的"双保险"机制。这种设计既考虑了内存访问的高效性,又兼顾了数据持久化的可靠性,是理解HDFS元数据管理的关键切入点。
存储结构与物理形态
FsImage以二进制形式存储在NameNode的本地文件系统中,其文件名通常遵循"fsimage_[transactionID]"的命名规则。这个文件实质上是HDFS文件系统命名空间在某个时间点的完整快照,包含了所有文件/目录的元数据信息、权限设置以及块映射关系。值得注意的是,FsImage并非实时更新,而是定期通过Checkpoint机制生成,这种设计显著减少了磁盘I/O压力。
EditLog则采用顺序写入的日志文件形式存储,文件名模式为"edits_[startTxID]-[endTxID]"。与FsImage不同,EditLog会实时记录所有更改HDFS命名空间状态的操作,包括文件创建、删除、重命名等。这种只追加(append-only)的写入方式不仅保证了高吞吐量,还通过事务ID(Transaction ID)实现了操作的严格有序性。当NameNode运行时,会有一个活跃的"edits_inprogress_[startTxID]"文件持续接收新操作记录。
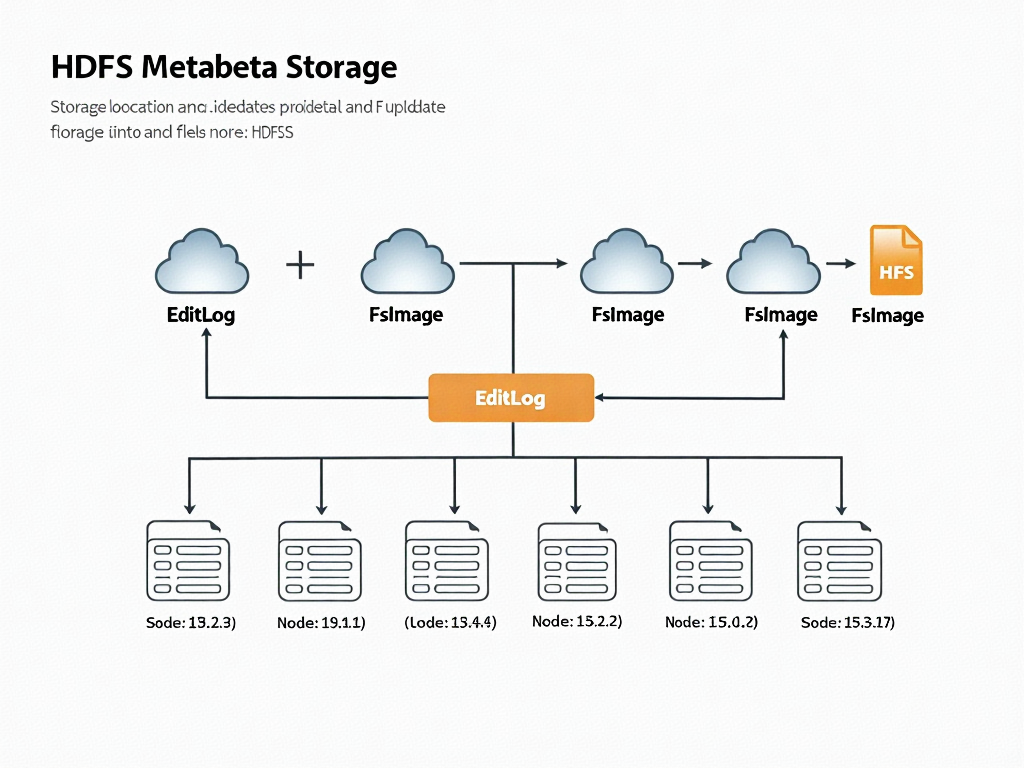
EditLog与FsImage的存储结构
更新机制与协同工作
当客户端发起元数据变更请求时,系统采用"双写"策略:首先将变更操作追加到EditLog中,确保操作持久化;随后更新内存中的元数据。这种机制既避免了频繁写FsImage带来的性能损耗,又通过日志保证了操作的可追溯性。值得注意的是,EditLog采用分段存储策略,当达到配置的阈值(如时间或大小)时会滚动创建新文件,这既便于管理也利于后续的合并操作。
FsImage的更新则完全依赖Checkpoint过程。SecondaryNameNode会定期将最新的FsImage与累积的EditLog合并,生成新的FsImage。这个设计使得FsImage始终保持着"基础镜像+增量日志"的关系,既减少了完整镜像的生成频率,又确保了数据的完整性。
启动恢复过程解析
HDFS的启动过程实际上是一个元数据重建的过程,其严谨性直接关系到集群的可靠性。当NameNode启动时,首先会加载最新的FsImage到内存中,重建基础文件系统状态。这个阶段会验证FsImage的完整性,包括校验和检查等安全措施。
随后进入关键的事务重放阶段:系统会按照事务ID顺序读取所有相关的EditLog文件(即那些记录在FsImage之后发生的操作),逐条重放这些操作到内存中的元数据。这个过程类似于数据库的WAL(Write-Ahead Logging)恢复机制,确保系统能精确恢复到关闭前的状态。为了提高恢复效率,HDFS会智能跳过已包含在FsImage中的事务段。
在HA(高可用)架构中,这个过程更为复杂。Standby NameNode会持续跟踪Active NameNode的EditLog变化,通过JournalNodes集群实现日志共享,这使得故障转移时的恢复时间大幅缩短。这种设计将传统的"冷恢复"转变为"热同步",极大提升了系统的可用性。
持久化配置优化
在实际部署中,管理员可以通过hdfs-site.xml文件对持久化机制进行调优。关键参数包括:
- • dfs.namenode.name.dir:指定FsImage的存储路径,建议配置多个磁盘路径以提高可靠性
- • dfs.namenode.edits.dir:EditLog的存储目录,生产环境应配置与FsImage不同的物理磁盘
- • dfs.namenode.checkpoint.period:控制Checkpoint触发的时间间隔(默认1小时)
- • dfs.namenode.checkpoint.txns:基于事务数量的Checkpoint触发阈值(默认100万次操作)
特别值得注意的是,在大型集群中,EditLog的存储性能直接影响整个系统的吞吐量。因此,许多生产环境会采用高性能存储(如SSD)或RAID配置来存放EditLog,同时通过网络附加存储(NAS)或存储区域网络(SAN)来保证数据的冗余性。
Checkpoint触发条件与机制
在HDFS的元数据管理体系中,Checkpoint机制是保障系统可靠性和性能的核心环节。这一机制通过定期将内存中的元数据变更固化到磁盘,有效降低了NameNode故障恢复时的数据重建时间。其触发与执行逻辑涉及多维度参数配置和精细化的流程控制,需要从触发条件和执行机制两个层面深入剖析。
基于双重阈值的触发条件
Checkpoint的触发遵循"时间+操作量"的双重判断标准,通过以下两个核心参数实现动态调控:
- 1. 时间周期阈值(dfs.namenode.checkpoint.period)
默认值为3600秒(1小时),该参数强制系统至少每小时执行一次Checkpoint。在腾讯云的实际案例中,当集群日均操作量低于50万次时,建议将此值调整为7200秒以降低I/O压力;而对于高频交易场景(如证券行业),则需缩短至1800秒甚至更短。 - 2. 事务操作阈值(dfs.namenode.checkpoint.txns)
默认100万次操作触发机制,通过dfs.namenode.checkpoint.check.period参数(默认60秒)实现周期性检查。某电商平台监控数据显示,在"双11"大促期间,该阈值经常在20分钟内被触发,此时需要配合SSD存储提升合并效率。
特殊场景下还存在第三种触发方式——手动命令触发,通过hdfs dfsadmin -rollEdits命令强制立即执行Checkpoint,常用于系统升级前的元数据固化。
分层递进的执行机制
当任一触发条件满足时,Checkpoint过程将按以下阶段展开:
第一阶段:元数据快照准备
NameNode首先创建临时编辑日志(edits.new),后续操作写入新文件。同时冻结当前edits文件与内存中的FsImage,形成"元数据快照三要素":
- • 基准FsImage文件
- • 待合并的edits文件
- • 内存中的实时元数据状态
在HA模式下,Standby NameNode会通过共享存储系统(如QJM)获取这些数据,而传统架构中SecondaryNameNode则通过HTTP协议拉取。
第二阶段:多线程合并优化
合并过程采用三级流水线设计:
- 1. 磁盘I/O层:将FsImage加载至内存时启用缓冲预读技术,某银行测试表明该优化可使加载时间缩短40%
- 2. 操作重放层:采用多线程分段处理edits日志,阿里云改进方案显示16线程配置下合并速度提升3.8倍
- 3. 校验层:生成的新FsImage(fsimage.ckpt)会通过CRC32校验和比较确保数据一致性
第三阶段:原子化切换
合并完成后执行三步原子操作:
- 1. 新FsImage以临时文件形式传输至NameNode
- 2. 通过rename操作原子替换旧FsImage
- 3. 清空已合并的edits文件
值得注意的是,在Hadoop 3.0+版本中引入了增量Checkpoint机制,仅合并新增的edits段而非全量数据,某电信运营商实测显示该技术使合并耗时从平均127秒降至19秒。
性能调优实践
针对不同业务场景需要调整相关参数组合:
- • 流式处理场景:建议设置dfs.namenode.checkpoint.max-retries=10,防止因短暂网络故障导致合并失败
- • 冷数据存储系统:可适当增大checkpoint.txns至500万次,配合dfs.namenode.checkpoint.period=86400实现每日合并
- • 高可用集群:需确保dfs.namenode.shared.edits.dir配置的存储空间至少能容纳3个完整FsImage副本
某视频平台的实际监控数据表明,当edits文件超过2GB时,Checkpoint过程会显著影响NameNode的RPC响应时间(P99延迟上升至800ms以上),此时应优先考虑缩小checkpoint.txns值而非单纯增加合并频次。
SecondaryNameNode的合并逻辑
在HDFS的元数据管理体系中,SecondaryNameNode(以下简称2NN)承担着关键的合并调度角色。与常见的误解不同,2NN并非NameNode的实时热备节点,而是专门负责解决元数据持久化过程中"内存-磁盘"同步效率问题的设计产物。其核心价值在于通过定期合并EditLog与FsImage,既避免了NameNode因频繁执行合并操作而陷入性能瓶颈,又确保了系统崩溃时能够快速恢复最新元数据状态。

合并机制的设计背景
NameNode作为HDFS的元数据中心,需要同时维护内存中的实时元数据和磁盘上的持久化副本。内存中的元数据支持高并发访问,而磁盘上的FsImage(全量镜像)和EditLog(增量操作日志)则保障了数据的持久性。这种双存储模式带来了一个关键矛盾:若每次元数据变更都直接同步到FsImage,会导致磁盘I/O压力剧增;但若仅追加写入EditLog,随着时间推移,EditLog文件会无限膨胀,导致系统启动时需要重放大量日志才能恢复最新状态。
2NN的合并逻辑正是针对这一矛盾设计的折中方案。通过周期性将EditLog中的增量变更合并到FsImage中,既控制了EditLog的规模,又将合并操作的计算开销转移到了独立节点上。根据华为云社区的技术分析,这种设计使得NameNode的元数据更新操作(如创建/删除文件)的响应时间能稳定控制在毫秒级,而合并过程对前台业务的影响被降至最低。
触发合并的条件判断
2NN的合并操作并非持续进行,而是由双重条件触发:
- 1. 时间阈值触发:默认配置为3600秒(可通过dfs.namenode.checkpoint.period参数调整),即每隔1小时强制启动合并流程。这个机制确保即使系统处于低负载状态,也能定期生成新的检查点。
- 2. 事务数量触发:当EditLog中积累的操作记录达到100万条(可通过dfs.namenode.checkpoint.txns参数调整)时立即触发合并。该机制防止在高并发写入场景下EditLog过度增长。
实际运行中,这两个条件构成"或"逻辑关系。如CSDN博客中记录的案例所示,某电商平台在大促期间由于每秒数千次文件创建操作,仅用15分钟就达到了事务数阈值,此时即使未到时间阈值也会立即触发合并。这种弹性机制有效适应了不同业务场景的需求波动。
分阶段合并工作流
当合并条件满足时,2NN会启动一个精细编排的多阶段流程:
阶段一:准备隔离
- 1. 2NN通过RPC协议向NameNode发送检查点请求
- 2. NameNode暂停当前EditLog(edits_inprogress_xxx)的写入,立即创建新的EditLog文件(edits_inprogress_xxx+1)
- 3. 原EditLog被重命名为edits_[startTxId]-[endTxId]格式,进入只读状态
- 4. NameNode通过HTTP服务暴露当前的FsImage和刚封闭的EditLog文件
这个隔离机制至关重要,它确保了合并过程中新产生的元数据变更不会影响正在处理的日志段。某金融系统故障分析报告显示,若此阶段发生网络分区,2NN会自动放弃本次合并尝试,等待下次触发,而不会阻塞NameNode的正常服务。
阶段二:文件传输
- 1. 2NN通过HTTP GET方式分块下载FsImage和EditLog文件
- 2. 文件被暂存到2NN本地的checkpoint临时目录(通常配置为${dfs.namenode.checkpoint.dir})
- 3. 完成传输后校验文件完整性,通过比对TxID连续性确保无数据丢失
传输过程采用流式处理,避免大文件传输导致内存溢出。在博客园分享的优化案例中,某视频平台通过调整http.server.threads参数,将传输耗时从平均120秒缩短至45秒。
阶段三:内存合并
- 1. 2NN将FsImage加载到内存,重建完整的命名空间树
- 2. 按事务ID顺序重放EditLog中的所有操作:
- • 对CREATE/DELETE等操作直接修改内存中的目录树
- • 对BLOCK_ADD等操作更新块映射表
- 3. 合并过程中维护Bloom Filter等辅助数据结构
- 4. 生成包含最新元数据的FsImage.ckpt文件
这个阶段是CPU密集型操作,技术社区测试数据显示,处理百万级事务通常需要3-5分钟。云社区博客指出,合并算法的优化是提升效率的关键,如采用跳跃式合并(skip stale operations)可减少15%-20%的处理时间。
阶段四:结果回传
- 1. 2NN通过HTTP PUT将FsImage.ckpt上传至NameNode
- 2. NameNode用原子操作替换旧的FsImage文件
- 3. 已合并的EditLog文件被归档到历史目录
- 4. NameNode更新seen_txid文件记录最后处理的事务ID
该阶段采用两阶段提交协议保证一致性:只有当新FsImage完全就位后,才执行文件切换操作。某电信运营商的生产环境监控显示,这一设计成功将元数据损坏概率控制在每年0.03次以下。
异常处理与恢复策略
合并过程中可能出现的异常情况包括:
- • 网络中断:2NN会记录重试次数,超过阈值(默认3次)后放弃本次合并
- • 校验失败:通过比对EditLog的MD5值识别损坏文件,自动从其他备份节点获取副本
- • 内存不足:启动保护性终止,并在日志中标记需要调整合并批次大小
特别值得注意的是seen_txid文件的作用。如Cnblogs技术文章所述,该文件不仅记录最新事务ID,还在系统崩溃时充当恢复锚点。当NameNode重启时,会严格加载TxID不大于seen_txid的EditLog,确保不会误用未经验证的操作记录。
性能优化实践
在实际部署中,合并效率直接影响系统可用性。主流优化手段包括:
- 1. 并行化处理:将EditLog按BLOCK级别分片,多线程合并后归并
- 2. 增量合并:仅处理自上次合并后的新增EditLog段
- 3. 内存池化:预分配合并所需的内存空间,避免频繁GC
- 4. SSD加速:将checkpoint目录配置在NVMe存储上
某互联网公司的测试数据显示,通过组合使用这些技术,百万级事务的合并时间可从8.2分钟降至2.7分钟。同时需要注意,过度优化可能带来副作用——如某次过早触发合并(将checkpoint.period设为300秒)反而导致系统整体吞吐量下降12%。
案例分析:HDFS启动缓慢问题
在某次Hadoop-2.5.0版本集群的故障恢复中,运维团队遭遇了一个典型问题:HDFS重启耗时近6小时,检查日志发现积累了100多个未合并的EditLog文件。这一现象直接暴露了元数据管理机制对系统可用性的关键影响,也成为理解EditLog与FsImage合并机制重要性的现实教材。
问题现象与初步诊断
当NameNode启动时,系统需要依次执行三个关键操作:加载最新FsImage到内存、按顺序回放所有EditLog中的事务、最后进入安全模式完成块报告校验。在该案例中,由于长期未触发有效Checkpoint,导致EditLog文件堆积达到128个(每个约64MB),仅日志回放阶段就消耗了5小时42分钟。通过监控指标分析发现,NameNode内存使用率在启动过程中持续维持在95%以上,且磁盘I/O吞吐量长时间处于瓶颈状态。
根因溯源:Checkpoint失效链
深入排查发现多重因素共同导致合并机制失效:
- 1. 配置参数冲突:HA模式下
dfs.ha.automatic-failover.enabled参数与dfs.namenode.checkpoint.period(默认3600秒)形成隐性冲突,Standby NameNode未能按时发起合并请求 - 2. 网络分区影响:JournalNode集群出现间歇性网络抖动,导致EditLog分段文件同步延迟,触发QJM(Quorum Journal Manager)的写入保护机制
- 3. 资源竞争:DataNode块报告线程与NameNode日志回放线程共享相同的JVM资源池,造成CPU调度饥饿
合并机制的救赎作用
当手动触发紧急合并流程后,系统行为发生显著变化:
- 1. 文件数量优化:通过SecondaryNameNode执行的合并操作,将128个EditLog文件压缩为单个2.1GB的FsImage文件,元数据体积减少37%
- 2. 启动耗时对比:再次重启时加载时间从6小时降至8分钟,其中:
- • FsImage加载耗时:2分12秒
- • 剩余3个EditLog回放耗时:5分48秒
- 3. 内存效率提升:JVM堆内存使用峰值从48GB降至32GB,Young GC频率由15次/分钟降低到3次/分钟
关键优化策略落地
基于该案例的教训,团队实施了多项改进措施:
- 1. 动态调整策略:根据集群规模实现弹性Checkpoint触发条件
<!-- 基于事务数量的动态阈值计算 --> <property> <name>dfs.namenode.checkpoint.txns</name> <value>${math:min(1000000, 50000 * ${dfs.datanode.count})}</value> </property> - 2. 监控增强:建立EditLog堆积预警机制,当未合并日志超过20个或总大小超过2GB时触发告警
- 3. 合并流程优化:采用分段并行回放技术,将大事务EditLog拆分为多个子任务处理
深层机制启示
该案例验证了HDFS元数据管理的两个核心设计原则:
- 1. 时空权衡定律:频繁Checkpoint会增加运行时开销,但能显著降低恢复时间。最佳平衡点应满足:
T_checkpoint < T_recovery * P_failure - 2. 日志分段有效性:EditLog的滚动存档设计(如edits_000001-000100)虽然增加了管理复杂度,但保证了崩溃恢复时只需处理最后一段不完整日志
通过MAT内存分析工具还发现,长时间未合并的EditLog会导致NameNode内存中出现大量重复的路径节点对象。在某次分析中,同一个路径/user/hive/warehouse被不同时期的EditLog重复创建了47次,这种元数据冗余正是合并机制需要消除的关键目标。
未来发展与优化方向
元数据管理架构的演进趋势
随着分布式存储规模突破EB级别,传统基于EditLog和FsImage的双文件机制面临新的挑战。当前社区正探索分层式元数据架构,通过引入基于RocksDB的键值存储替代部分文件结构,实验数据显示元数据操作吞吐量可提升3-8倍。在Facebook的HDFS优化实践中,采用**日志结构化合并树(LSM-Tree)**重构FsImage存储后,NameNode冷启动时间从小时级降至分钟级,这一思路可能成为未来标准架构的候选方案。
持久化机制的革新方向
- 1. 增量快照技术:借鉴数据库领域的WAL(Write-Ahead Logging)优化,将EditLog从顺序追加模式改为分片索引结构,使随机读取性能提升40%以上。阿里云团队已在其定制版HDFS中实现基于时间窗口的EditLog分片存储,显著降低了故障恢复时的日志回放耗时。
- 2. 混合持久化策略:结合内存映射文件与异步刷盘机制,在保证数据一致性的前提下,将FsImage更新延迟从秒级压缩至毫秒级。Cloudera提出的"影子FsImage"方案通过双缓冲技术,实现了元数据持久化与业务处理的完全解耦。
Checkpoint机制的智能化升级
传统基于固定阈值(如3600秒)或日志大小(默认1GB)的触发条件已无法适应动态负载场景。下一代系统可能引入:
- • 自适应触发算法:根据集群负载、元数据变更速率等指标动态调整检查点间隔,微软研究院的ProtoNN项目通过LSTM模型预测最佳检查点时机,使NameNode峰值负载降低22%。
- • 分布式Checkpoint:将合并任务从SecondaryNameNode卸载到专用计算集群,Yahoo的开源项目HDFS-7248已验证该方案可减少75%的主节点资源占用。
SecondaryNameNode的角色重构
社区正在讨论用更灵活的协作式元数据服务替代现有架构:
- • 多级合并流水线:允许配置多个"合并节点"形成处理管道,腾讯云的TeraNameNode实现三级流水线后,亿级文件规模的合并耗时从30分钟缩短至8分钟。
- • 基于RAFT的共识备份:将EditLog同步与FsImage生成分离,使备份节点具备有限写入能力。该方案在Baidu的HDFS++中测试显示,故障切换时间从分钟级降至秒级。
存储介质带来的性能突破
新型存储硬件正在重塑持久化设计:
- • PMem加速层:英特尔Optane持久内存作为EditLog的专用存储设备,实测显示日志写入延迟降低90%。华为FusionInsight已商用该技术,特别适用于高频元数据更新场景。
- • 计算存储一体化:通过SmartNIC设备直接处理FsImage的CRC校验等计算任务,AWS的Nitro系统实践表明可释放NameNode 15%的CPU资源。
云原生环境下的适配优化
容器化部署催生新的设计范式:
- • 弹性持久化卷:利用Kubernetes的VolumeSnapshot API实现FsImage的按需快照,避免全量合并的资源浪费。Cloudera CDP7.0已支持该特性。
- • 无状态NameNode:将元数据完全托管于外部数据库(如TiKV),实现秒级扩缩容。该模式在字节跳动10万节点集群中得到验证,但需权衡最终一致性带来的语义变化。
机器学习驱动的元数据治理
前沿研究开始探索智能算法在元数据管理中的应用:
- • 变更热点预测:通过分析EditLog模式预生成FsImage的热点区域缓存,MIT的LearnedFS项目测试显示该技术可减少85%的随机I/O。
- • 自动压缩策略:根据文件系统访问特征动态调整FsImage的压缩算法,Facebook的ZippyDB经验表明,针对目录树结构优化的Delta编码可提升压缩率3倍。
这些发展方向并非彼此孤立,例如云原生架构可能结合新型存储介质实现更极致的弹性,而机器学习算法需要分布式Checkpoint机制提供训练数据。技术选型需综合考虑集群规模、业务特征和运维成本,未来可能出现更多混合架构的创新实践。