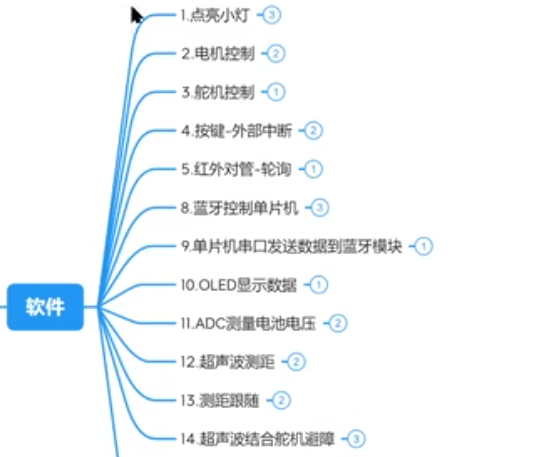
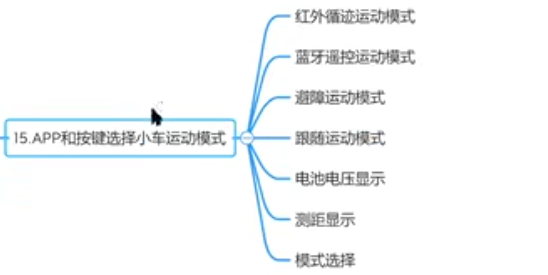
项目综述
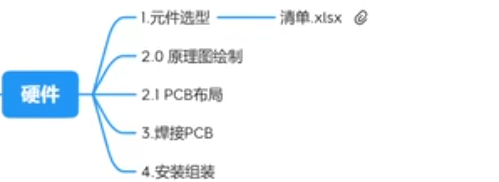
立创EDA绘制
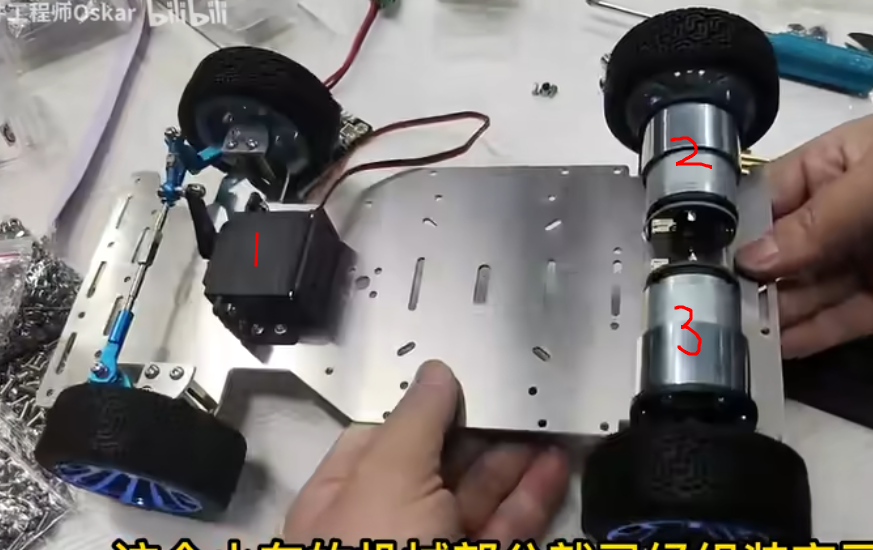
轮子和电机安装
电机固定在底盘上,轮子安装在电机的白色轴上。

前轮转向机构:转向杯、小轴承、大轴承、结合器、
三个舵机,1号舵机控制方向,2、3号提供动力
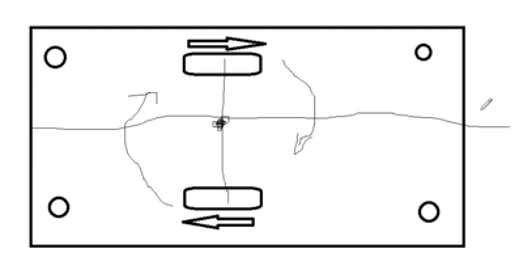
驱动轮
辅助轮
两轮差速 ,原地旋转 调整左右2轮的速度
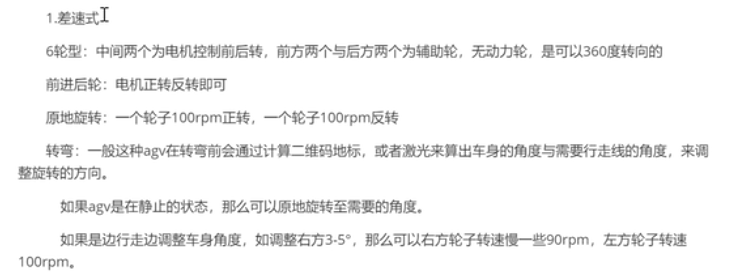
无线手柄遥控小车
手柄 接收器,转接板方便接收器和开发板连接。
2.4GhZ信号频段,连接稳定性、响应速度、延迟
NRF24L01P芯片
四路循迹
四组红外探头,每组一个红外发射器一个红外接收器。如果探头下方是黑色的路线,黑色会吸收掉探头发出的红外光,所以红外接收器接收不到返回的红外光。
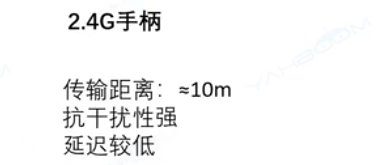
PID控制
现实场景里受到各种外界因素影响。
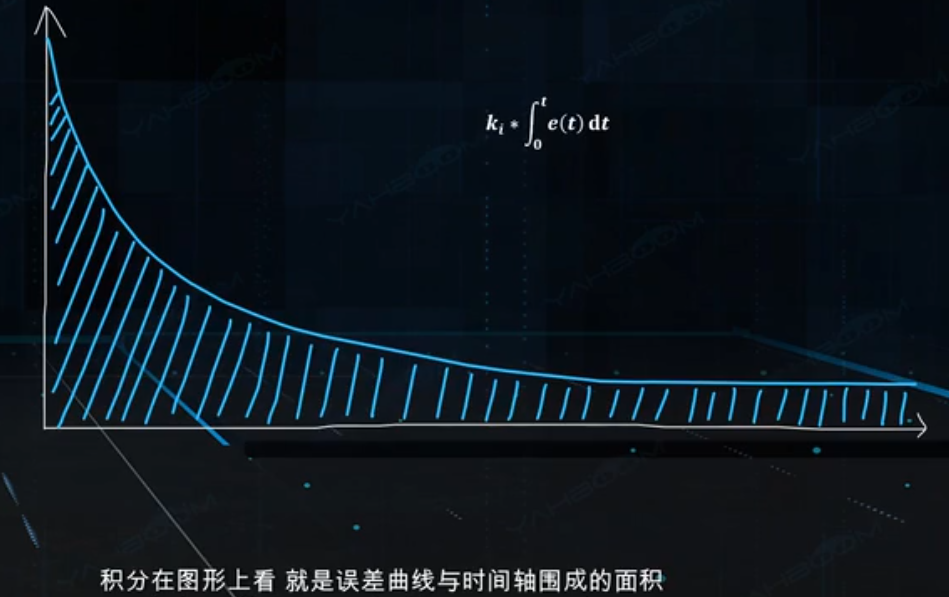
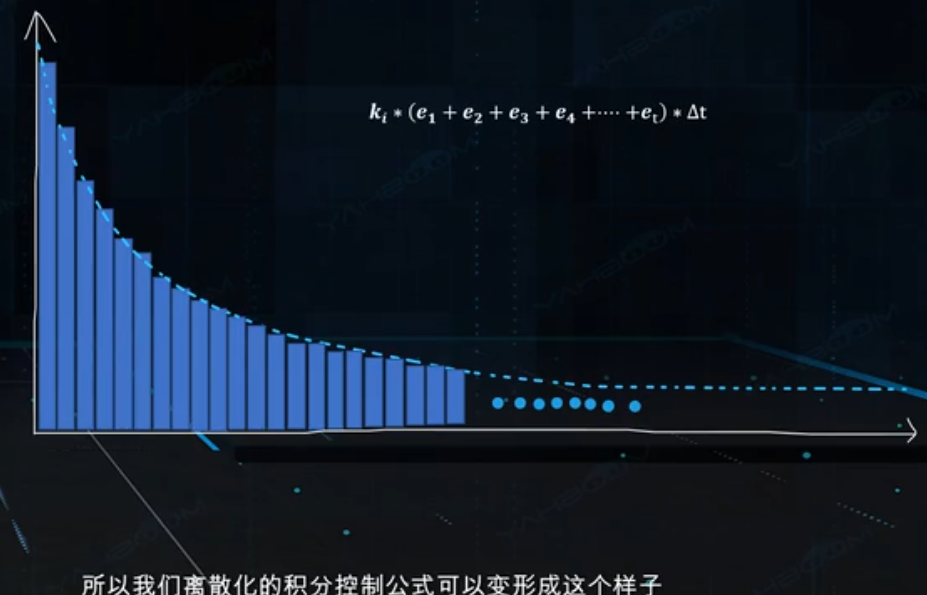
时刻计算误差,根据这个误差计算出一个符合当前状态的控制量。
需要不断循环计算当前值和目标值的差值。

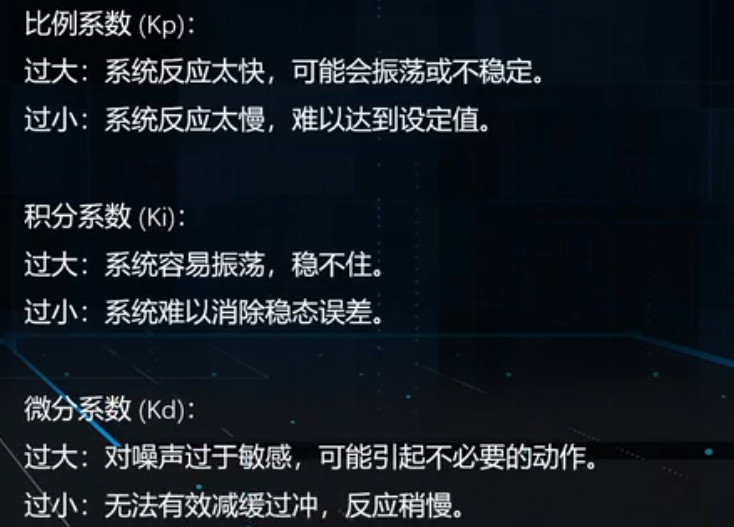
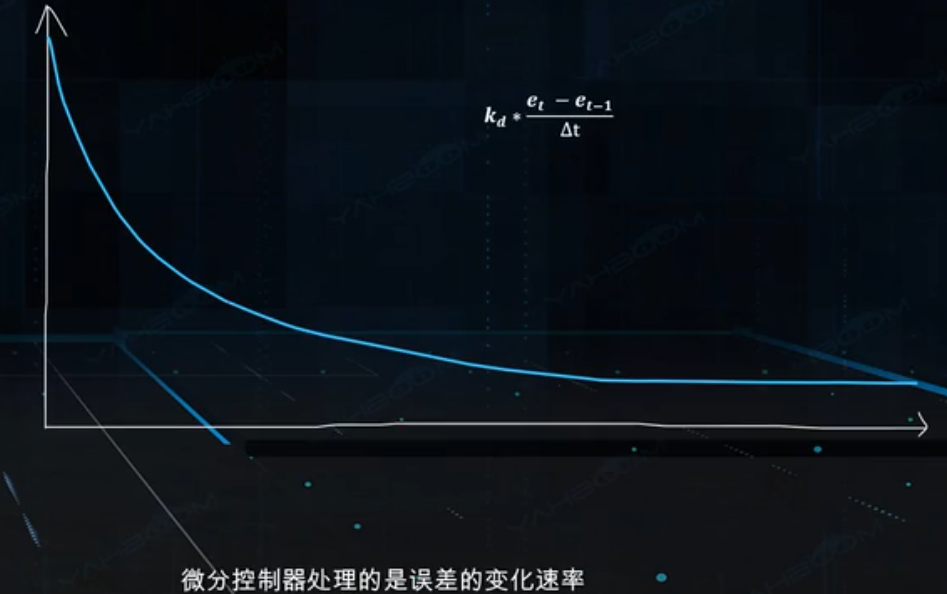
微分控制器的输出是误差对时间的导数乘以一个微分系数kd。导数在数学上的概念是变化的速率。当误差变化非常迅速时,微分控制器能迅速响应误差的变化,输出一个较大的值,及时调整控制器的输出,防止误差过大。可以想象为汽车的减振器。
通过计算误差的变化速度进行快速调整。对系统中的噪声非常敏感。
位置式pid属于基础的pid算法,但通用性高,在一般的运动控制中非常好用。

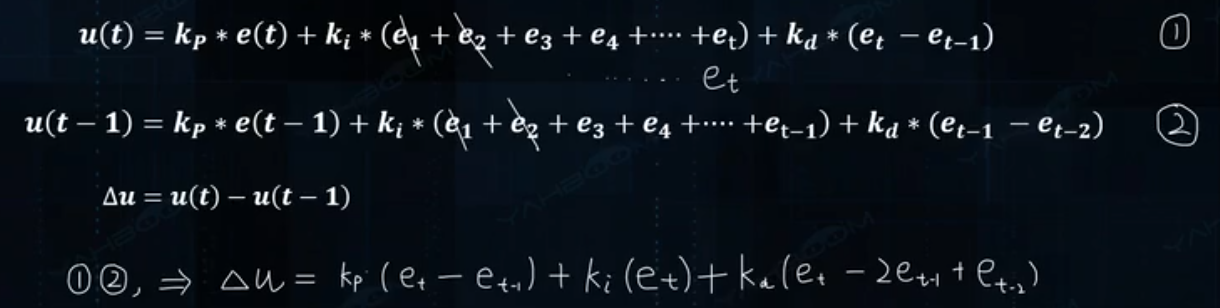
位置式PID
前一次误差减去当前误差除以一个采样时间间隔。
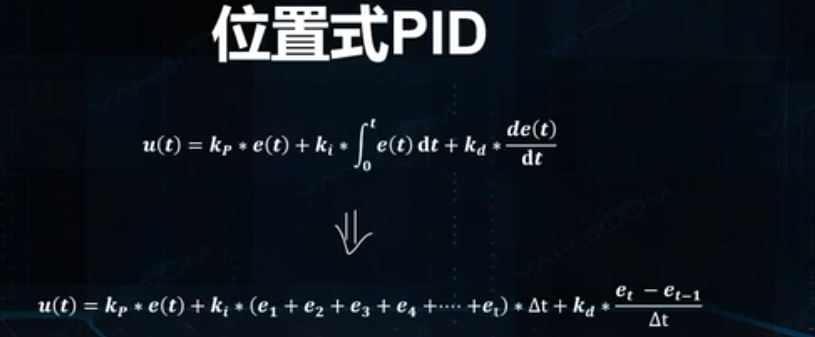

delta_t合并k_i,delta_t合并k_d
增量式pid
位置式pid每次循环计算出来的是一个直接给到控制器的一个输出值;增量式pid先计算出这一次输出值相较于上一次输出量的一个增量,把这个增量增加到上一次的输出值上面,最后再给到控制器。
位置和增量式pid,在积分项上的差异,增量式pid积分项考虑的只是此刻的误差,位置式pid每次的误差是累加的,如果存在一个误差源,它的误差会不断积累。而增量式pid无需累加。增量式pid适用于防止剧烈变动的情况。计算负担比位置式pid小
串联级pid

电机电流
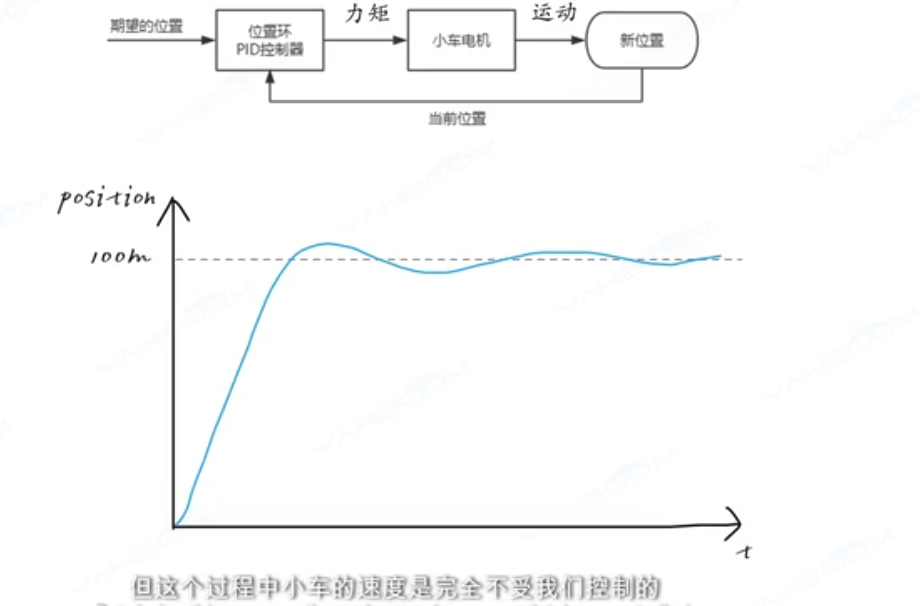
单级pid位置环输出的pid直接作用在电机上,pid输出值的物理意义就是电机的力的大小(电机电压大小、pwm占空比)。
串联pid中位置环输出的指令直接作为内环速度环的一个输入,此时位置环输出量的物理意义期望的速度
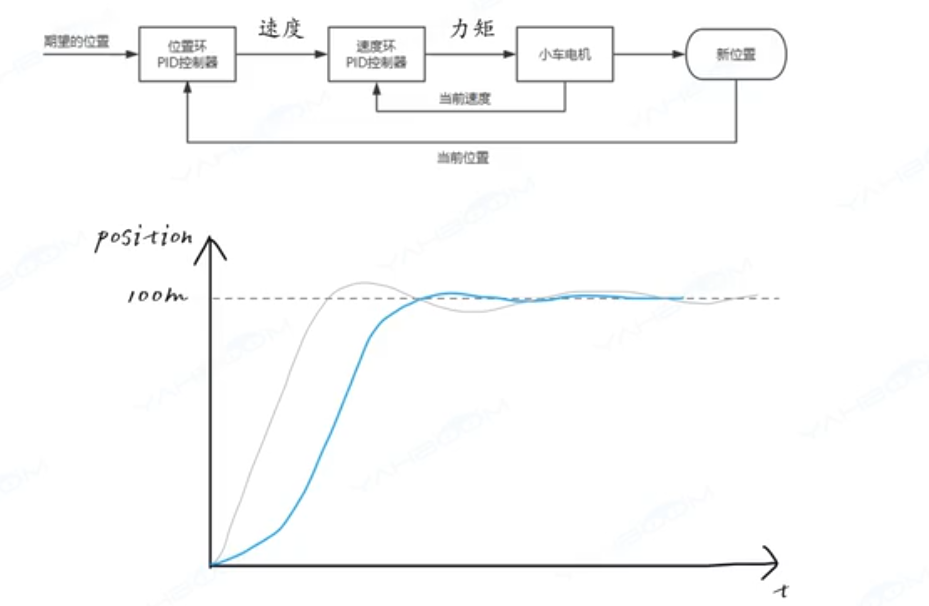
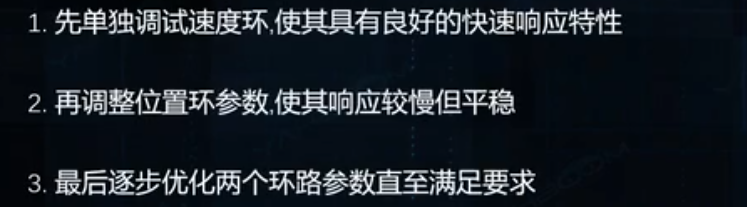
速度环设置的要比位置环快3~5倍。
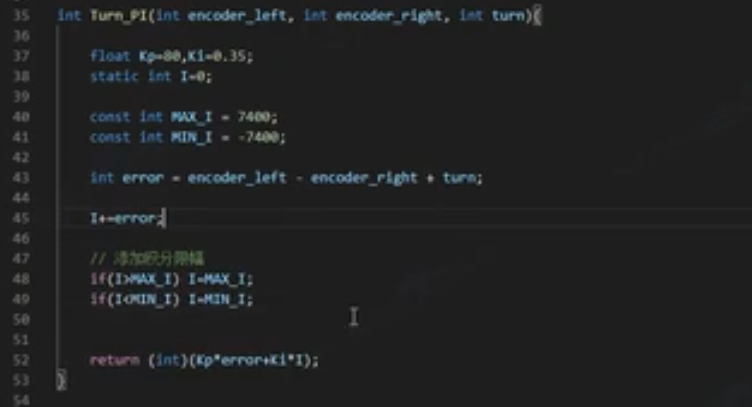
转向控制
两轮平衡车
小车目标转角为0,也就是控制两个电机不要有速度差异。
积分项消除稳态误差,积分项累计误差,可能导致一些震荡。微分项提供一个更快的响应速度。
参数:2个编码器度数和目标角度
积分限制幅度:积分系数Ki=0.35,Ki*积分大小限制在电机PWM范围内(正负2600),2600 / 0.35 = 7428.5714
亚博智能