前言:
大二兴趣使然参加了学校的船模设计比赛,也算是第一次正式比赛的经验,一番努力下来也算是有所收获,虽说现在船已经不在身边,但还是想凭着记忆把制作过程捋一遍,就当是记录学习过程吧(该文章仅供参考,相信各位看我文章只图一乐,真做起来当然会比我初出茅庐做得好啦)
非保姆级非保姆级非保姆级,细节处需要思考,谢谢
设计思路: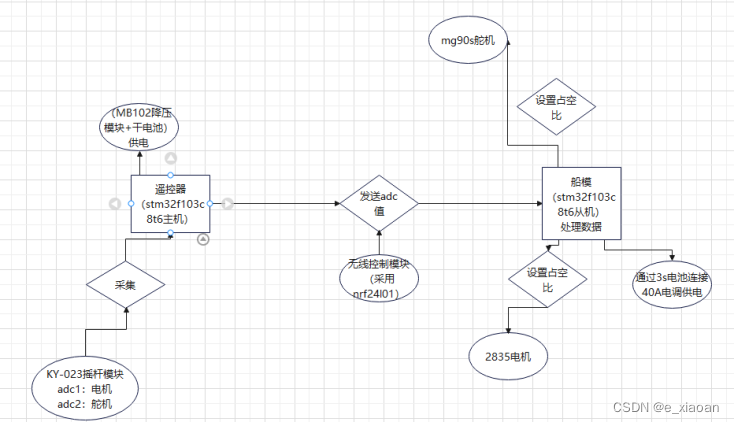
可以看见所需理解并使用的功能有:adc采集、pwm输出、nrf24l01通信 ,这些功能的使用在本站有大把文章讲述,故不作过多阐述,学习后再参考本文即可。
软件实现:
本文章大部分使用正点原子例程修改。
main.c
#include "system.h"
#include "SysTick.h"
#include "led.h"
#include "usart.h"
#include "nrf24l01.h"
#include "string.h"
#include "adc.h"
#include<stdio.h>
#include "pwm.h"
int main()
{
//u8 mode=0;
u8 mode=1;
int val1=0,val2=0;
long int adc=0;
u8 rx_buf[33]="123456";
SysTick_Init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组 分2组.0
USART1_Init(9600);
NRF24L01_Init();
ADCx_Init();
TIM1_PWM_Init(9999,143);
TIM3_CH1_PWM_Init(199,7199);//20ms
printf("2.4G Telecontrol\r\n");
while(NRF24L01_Check()) //检测NRF24L01是否存在
{
printf("2G4 ERROR\r\n");
}
printf("2G4 OK\r\n");
if(mode==1)//发送模式
{
NRF24L01_TX_Mode();//先设置为发送函数
while(1)
{
val1=Get_ADC1_Value(ADC_Channel_0,20);
val2=Get_ADC1_Value(ADC_Channel_1,20);//获取adc值
printf("检测AD1值为:%d\r\n",val1);//串口检验
printf("检测AD2值为:%d\r\n",val2);
if(1500<=val1&&val1<=2000)//分档
val1=9210;
else if(1000<=val1&&val1<1500)
val1=9190;
else if(500<=val1&&val1<1000)
val1=9180;
else if(0<=val1&&val1<=500)
val1=9165;
else
val1=9220;
if(1600<val2&&val2<2500)
val2=15;
else if(val2<=1600)
val2=5;
else if(val2>=2500)
val2=25;
printf("电机数字为:%d\r\n",val1);
printf("舵机数字为:%d\r\n",val2);
adc=val1*100+val2;
sprintf(rx_buf,"%d",adc);
NRF24L01_TxPacket(rx_buf);
}
}
if(mode==0)//接收模式
{
TIM_SetCompare1(TIM1,9000);
delay_ms(50);
TIM_SetCompare1(TIM1,9220);
delay_ms(50);
NRF24L01_RX_Mode();
while(1)
{
if(NRF24L01_RxPacket(rx_buf)==0) //接收到数据显示
{
long int adc1=9220,adc2=15 ;
rx_buf[32]='\0';
sscanf(rx_buf,"%4d",&adc1);
sscanf(rx_buf,"%d",&adc2);
adc2=adc2-adc1*100;
printf("电机数字为:%d\r\n",adc1);
printf("舵机数字为:%d\r\n",adc2);
TIM_SetCompare1(TIM1,adc1);//设置占空比
TIM_SetCompare1(TIM3,adc2);
}
}
}
return 0;
}
nrf24l01.c
#include "nrf24l01.h"
#include "spi.h"
#include "usart.h"
const u8 TX_ADDRESS[TX_ADR_WIDTH]={0x34,0x43,0x10,0x10,0x01}; //发送地址
const u8 RX_ADDRESS[RX_ADR_WIDTH]={0x34,0x43,0x10,0x10,0x01};
//初始化24L01的IO口
void NRF24L01_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 使能PB端口时钟
/*GPIO_Mode_Out_PP是作为普通IO口,在NRF2401上是CS片选信号和IRQ模块的中断信号*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_12; // PB10、PB12推挽
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 作为普通IO推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); // 初始化指定IO
GPIO_ResetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_12); // PB10、PB12输出低
//为低的话实际是使能片选,但是因为C8T6上面没有W25Q128,所以使能没问题
/*这个应该是CE、使能芯片的接发模式*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; // PB11输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
SPI2_Init_JX(); // 初始化SPI
NRF24L01_CE=0; //使能24L01
NRF24L01_CSN=1; //SPI片选取消
}
//检测24L01是否存在
//返回值:0,成功;1,失败
u8 NRF24L01_Check(void)
{
u8 buf[5]={0XA5,0XA5,0XA5,0XA5,0XA5};
u8 i;
SPI2_SetSpeed(SPI_BaudRatePrescaler_4); //spi速度为9Mhz(24L01的最大SPI时钟为10Mhz)
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,buf,5);//写入5个字节的地址. ******
NRF24L01_Read_Buf(TX_ADDR,buf,5); //读出写入的地址 ****这两个的地址为什么不一样 ,应该是一个是命令
for(i=0;i<5;i++) //读出返回一个数据
if(buf[i]!=0XA5)break; //因为
if(i!=5)return 1;//检测24L01错误
return 0; //检测到24L01
/*
for(i=0;i<5;i++)
{
if(buf[i]!=0XA5)
{
return 1;
break;
}
}
*/
}
//SPI写寄存器
//reg:指定寄存器地址
//value:写入的值
u8 NRF24L01_Write_Reg(u8 reg,u8 value)
{
u8 status;
NRF24L01_CSN=0; //使能SPI传输
status =SPI2_ReadWriteByte(reg);//发送寄存器号
SPI2_ReadWriteByte(value); //写入寄存器的值
NRF24L01_CSN=1; //禁止SPI传输
return(status); //返回状态值
}
//读取SPI寄存器值
//reg:要读的寄存器
u8 NRF24L01_Read_Reg(u8 reg)
{
u8 reg_val;
NRF24L01_CSN = 0; //使能SPI传输
SPI2_ReadWriteByte(reg); //发送寄存器号
reg_val=SPI2_ReadWriteByte(0XFF);//读取寄存器内容
NRF24L01_CSN = 1; //禁止SPI传输
return(reg_val); //返回状态值
}
//在指定位置读出指定长度的数据
//reg:寄存器(位置)
//*pBuf:数据指针
//len:数据长度
//返回值,此次读到的状态寄存器值
u8 NRF24L01_Read_Buf(u8 reg,u8 *pBuf,u8 len)
{
u8 status,u8_ctr;
NRF24L01_CSN = 0; //使能SPI传输
status=SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态值
for(u8_ctr=0;u8_ctr<len;u8_ctr++)pBuf[u8_ctr]=SPI2_ReadWriteByte(0XFF);//读出数据
NRF24L01_CSN=1; //关闭SPI传输
return status; //返回读到的状态值
}
//在指定位置写指定长度的数据
//reg:寄存器(位置)
//*pBuf:数据指针
//len:数据长度
//返回值,此次读到的状态寄存器值
u8 NRF24L01_Write_Buf(u8 reg, u8 *pBuf, u8 len)
{
u8 status,u8_ctr;
NRF24L01_CSN = 0; //使能SPI传输
status = SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态值
//printf("%d",status);
for(u8_ctr=0; u8_ctr<len; u8_ctr++)SPI2_ReadWriteByte(*pBuf++); //写入数据
NRF24L01_CSN = 1; //关闭SPI传输
return status; //返回读到的状态值
}
//启动NRF24L01发送一次数据
//txbuf:待发送数据首地址
//返回值:发送完成状况
u8 NRF24L01_TxPacket(u8 *txbuf)
{
u8 sta;
SPI2_SetSpeed(SPI_BaudRatePrescaler_4);//spi速度为9Mhz(24L01的最大SPI时钟为10Mhz)
NRF24L01_CE=0;//开启2.4G的传输--------------下面有配套的
NRF24L01_Write_Buf(WR_TX_PLOAD,txbuf,TX_PLOAD_WIDTH);//写数据到TX BUF 32个字节 ****NRF24L01_Write_Buf(),写函数 //里面协议有开启spi的传输 NRF24L01_CSN=0
NRF24L01_CE=1;//启动发送
while(NRF24L01_IRQ!=0);//等待发送完成 **中断引脚为低电平时,发送完成
sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,sta); //清除TX_DS或MAX_RT中断标志
if(sta&MAX_TX)//达到最大重发次数
{
NRF24L01_Write_Reg(FLUSH_TX,0xff);//清除TX FIFO寄存器
return MAX_TX;
}
if(sta&TX_OK)//发送完成
{
return TX_OK;
}
return 0xff;//其他原因发送失败
}
//启动NRF24L01发送一次数据
//txbuf:待发送数据首地址
//返回值:0,接收完成;其他,错误代码
u8 NRF24L01_RxPacket(u8 *rxbuf)
{
u8 sta;
SPI2_SetSpeed(SPI_BaudRatePrescaler_8); //spi速度为9Mhz(24L01的最大SPI时钟为10Mhz)
sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,sta); //清除TX_DS或MAX_RT中断标志
if(sta&RX_OK)//接收到数据
{
NRF24L01_Read_Buf(RD_RX_PLOAD,rxbuf,RX_PLOAD_WIDTH);//读取数据
NRF24L01_Write_Reg(FLUSH_RX,0xff);//清除RX FIFO寄存器
return 0;
}
return 1;//没收到任何数据
}
//该函数初始化NRF24L01到RX模式
//设置RX地址,写RX数据宽度,选择RF频道,波特率和LNA HCURR
//当CE变高后,即进入RX模式,并可以接收数据了
void NRF24L01_RX_Mode(void)
{
NRF24L01_CE=0;
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH);//写RX节点地址
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01);//使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,60); //设置RF通信频率
NRF24L01_Write_Reg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);//选择通道0的有效数据宽度
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f);//设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG, 0x0f);//配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式
NRF24L01_CE = 1; //CE为高,进入接收模式
}
//该函数初始化NRF24L01到TX模式
//设置TX地址,写TX数据宽度,设置RX自动应答的地址,填充TX发送数据,选择RF频道,波特率和LNA HCURR
//PWR_UP,CRC使能
//当CE变高后,即进入RX模式,并可以接收数据了
//CE为高大于10us,则启动发送.
void NRF24L01_TX_Mode(void)
{
NRF24L01_CE=0;
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(u8*)TX_ADDRESS,TX_ADR_WIDTH);//写TX节点地址
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH); //设置TX节点地址,主要为了使能ACK
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01); //使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+SETUP_RETR,0x1a);//设置自动重发间隔时间:500us + 86us;最大自动重发次数:10次
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,60); //设置RF通道为60
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f); //设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG,0x0e); //配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式,开启所有中断
NRF24L01_CE=1;//CE为高,10us后启动发送
}
spi.c
#include "spi.h"
// SPI2初始化
//---------------------------------------------------------------------------------------------------------------
void SPI2_Init_JX(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE ); // GPIOB时钟使能
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE ); // SPI2时钟使能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // PB13/14/15复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); // 初始化GPIOB
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15); // PB13/14/15上拉
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; // SPI主机
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; // 发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; // 时钟悬空低
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; // 数据捕获于第1个时钟沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; // NSS信号由软件控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16; // 定义波特率预分频的值:波特率预分频值为16
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; // 数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; // CRC值计算的多项式
SPI_Init(SPI2, &SPI_InitStructure);
SPI_Cmd(SPI2, ENABLE); // 使能SPI外设
SPI2_ReadWriteByte(0xFF); // 启动传输
}
//---------------------------------------------------------------------------------------------------------------
// 设置SPI速度
//---------------------------------------------------
// SPI_DivideFrequency_2 2分频: 18MHz
// SPI_DivideFrequency_4 4分频: 9MHz
// SPI_DivideFrequency_8 8分频: 4.5MHz
// SPI_DivideFrequency_16 16分频:2.25MHz
void SPI2_SetSpeed(u8 SPI_DivideFrequency)
{
SPI2->CR1&=0XFFC7;
SPI2->CR1|=SPI_DivideFrequency; //设置SPI2速度
//SPI_Cmd(SPI2,ENABLE);
}
//---------------------------------------------------
// SPI读写一个字节
// TxData:要写入的字节
// 返回值:读取到的字节
//-----------------------------------------------------------------------
u8 SPI2_ReadWriteByte(u8 TxData)
{
u8 TxWait = 0;
u8 RxWait = 0;
// 等待发送缓存为空
while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET)
{
TxWait++;
if(TxWait>250) // 等待时间过长则放弃本次读写
return 0;
}
SPI_I2S_SendData(SPI2, TxData); // SPI2写一个字节
// 等待接收缓存为空
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET)
{
RxWait++;
if(RxWait>250) // 等待时间过长则放弃本次读写
return 0;
}
return SPI_I2S_ReceiveData(SPI2); // 将读到的字节返回
}
//-----------------------------------------------------------------------
adc.c
#include "adc.h"
#include "SysTick.h"
void ADCx_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体变量
ADC_InitTypeDef ADC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1; //选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率,输入可不要
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
ADC_DeInit(ADC1); //复位ADC1,将外设 ADC1 的全部寄存器重设为缺省值
ADC_InitStructure.ADC_Mode=ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode=ENABLE;//扫描模式
ADC_InitStructure.ADC_ContinuousConvMode=ENABLE;//连续触发
ADC_InitStructure.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None;//外部触发禁用
ADC_InitStructure.ADC_DataAlign=ADC_DataAlign_Right;//数据对齐方式
ADC_InitStructure.ADC_NbrOfChannel=2;//通道数
ADC_Init(ADC1,&ADC_InitStructure);
// ADC_RegularChannelConfig(ADC1,ADC_Channel_0,1,ADC_SampleTime_239Cycles5);
// ADC_RegularChannelConfig(ADC1,ADC_Channel_1,2,ADC_SampleTime_239Cycles5);
ADC_Cmd(ADC1,ENABLE);
ADC_ResetCalibration(ADC1);//复位校准寄存器
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);//开始校准
while(ADC_GetCalibrationStatus(ADC1));
ADC_SoftwareStartConvCmd(ADC1,ENABLE);//软件触发
}
u16 Get_ADC1_Value(u8 ch,u8 times)//通道,采集次数
{
u8 t;
u32 temp_val1=0,temp_val2=0;
ADC_RegularChannelConfig(ADC1,ch,1,ADC_SampleTime_239Cycles5);//设置规则通道
ADC_RegularChannelConfig(ADC1,ch,2,ADC_SampleTime_239Cycles5);//设置规则通道
for(t=0;t<times;t++)//多次采集
{
ADC_SoftwareStartConvCmd(ADC1,ENABLE);//软件触发
while(!ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC));//返回为1,转化完成
if(0<=t&&t<=3)
ADC_GetConversionValue(ADC1);
if(t>3&&t%2==0)
temp_val1+=ADC_GetConversionValue(ADC1);
if(t>3&&t%2==1)
temp_val2+=ADC_GetConversionValue(ADC1);
delay_ms(5);
}
if(ch==ADC_Channel_0)
return temp_val1*2/(times-4);
if(ch==ADC_Channel_1)
return temp_val2*2/(times-4);
}
u16 Get_ADC2_Value(u8 ch,u8 times)//通道,采集次数
{
u8 t;
u32 temp_val=0;
ADC_RegularChannelConfig(ADC1,ch,2,ADC_SampleTime_239Cycles5);//设置规则通道
for(t=0;t<times;t++)//多次采集
{
ADC_SoftwareStartConvCmd(ADC1,ENABLE);//软件触发
while(!ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC));//返回为1,转化完成
if(t%2==1)
temp_val+=ADC_GetConversionValue(ADC1);
delay_ms(5);
}
return temp_val/times;
}
pwm.c
#include "pwm.h"
#include "led.h"
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK Mini STM32开发板
//PWM 驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//修改日期:2010/12/03
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 正点原子 2009-2019
//All rights reserved
//
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能
//设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能
TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM1, ENABLE); //使能TIM1
}
void TIM3_CH1_PWM_Init(u16 pre,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体变量
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6; //选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //设置推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
TIM_TimeBaseInitStructure.TIM_Period=pre;//重载
TIM_TimeBaseInitStructure.TIM_Prescaler=psc;//预分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;//1分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OC1Init(TIM3,&TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3,ENABLE);
TIM_Cmd(TIM3,ENABLE);
}
硬件实现:
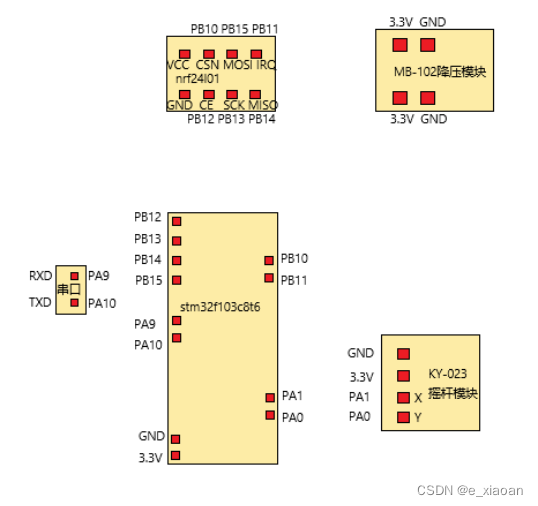
遥控器原理图:
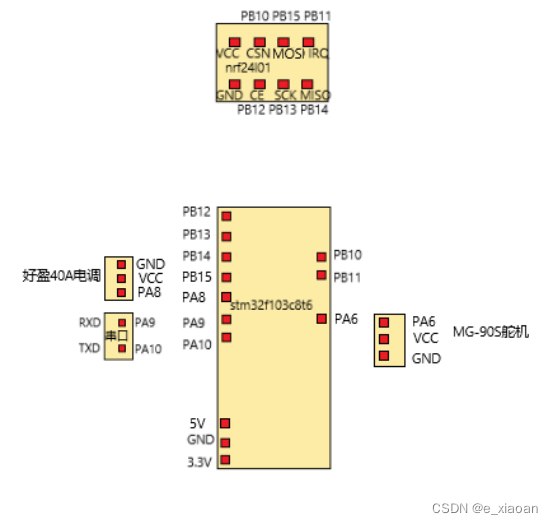
船模接收端原理图:
主要零件选择:
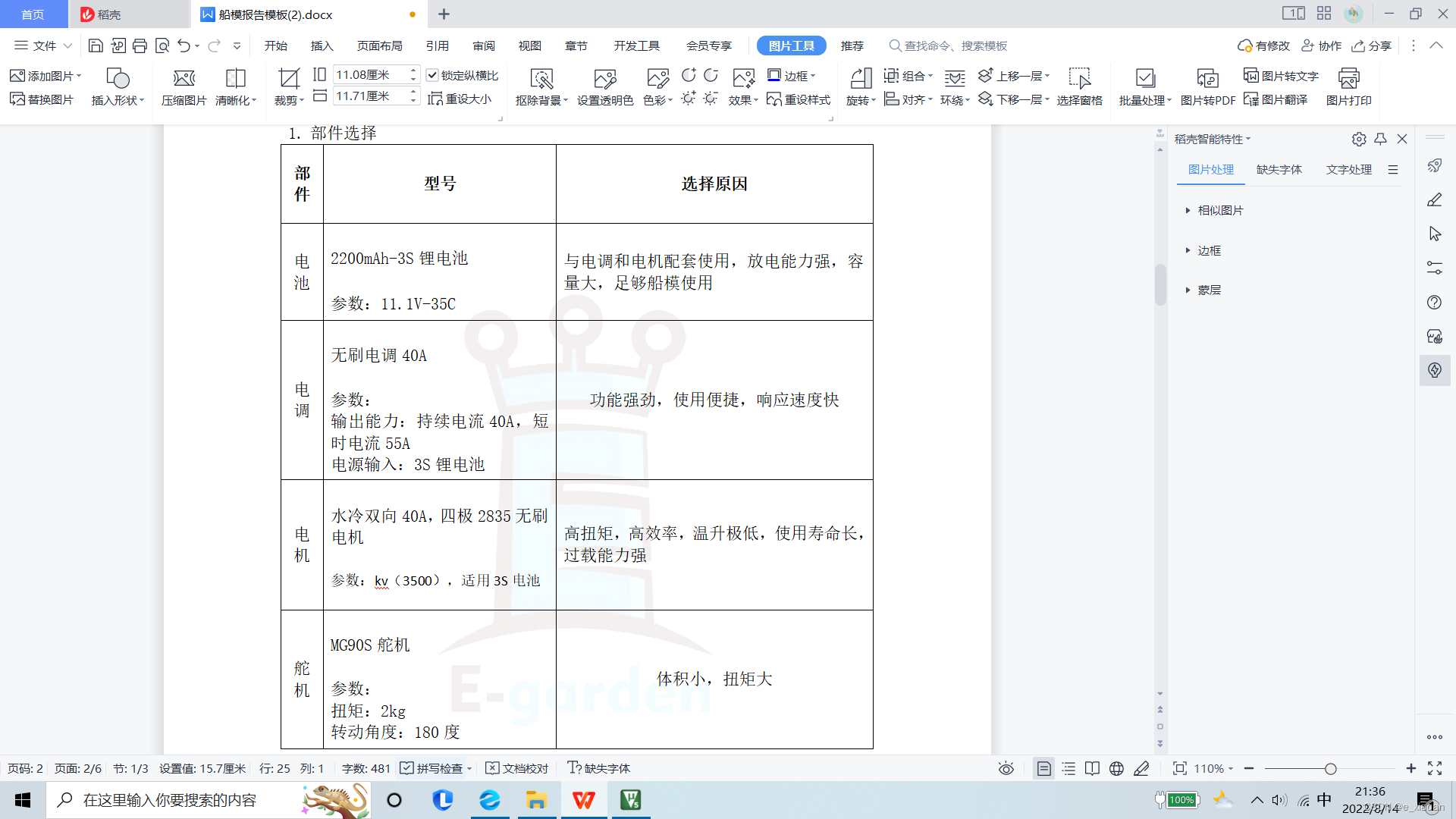
以及:船壳一套(我买的是西南科普模型的套材,需要自己组装、空间分配),stm32f103c8t6最小系统板 x 2、nrf24l01 x 2、杜邦线若干、摇杆(电位器)x 2、遥控供电模块 x 1、环氧树脂一瓶、拉杆x1、螺旋桨x1、轴总成x1、风琴套x1、ab胶若干。
(此为船模比赛中选用部件,在淘宝店铺模型风向标可购买,实际使用中2835电机马力远远超出所需,可采用马力更小的电机。)
实物图:(只有这么多了,平常不爱拍照 = = )

船模效果预览:
链接:https://pan.baidu.com/s/1ClJqUcCQa1HZsOu5ee1Jug?pwd=e5in
提取码:e5in
开起来还是很带劲的!
本文含有隐藏内容,请 开通VIP 后查看